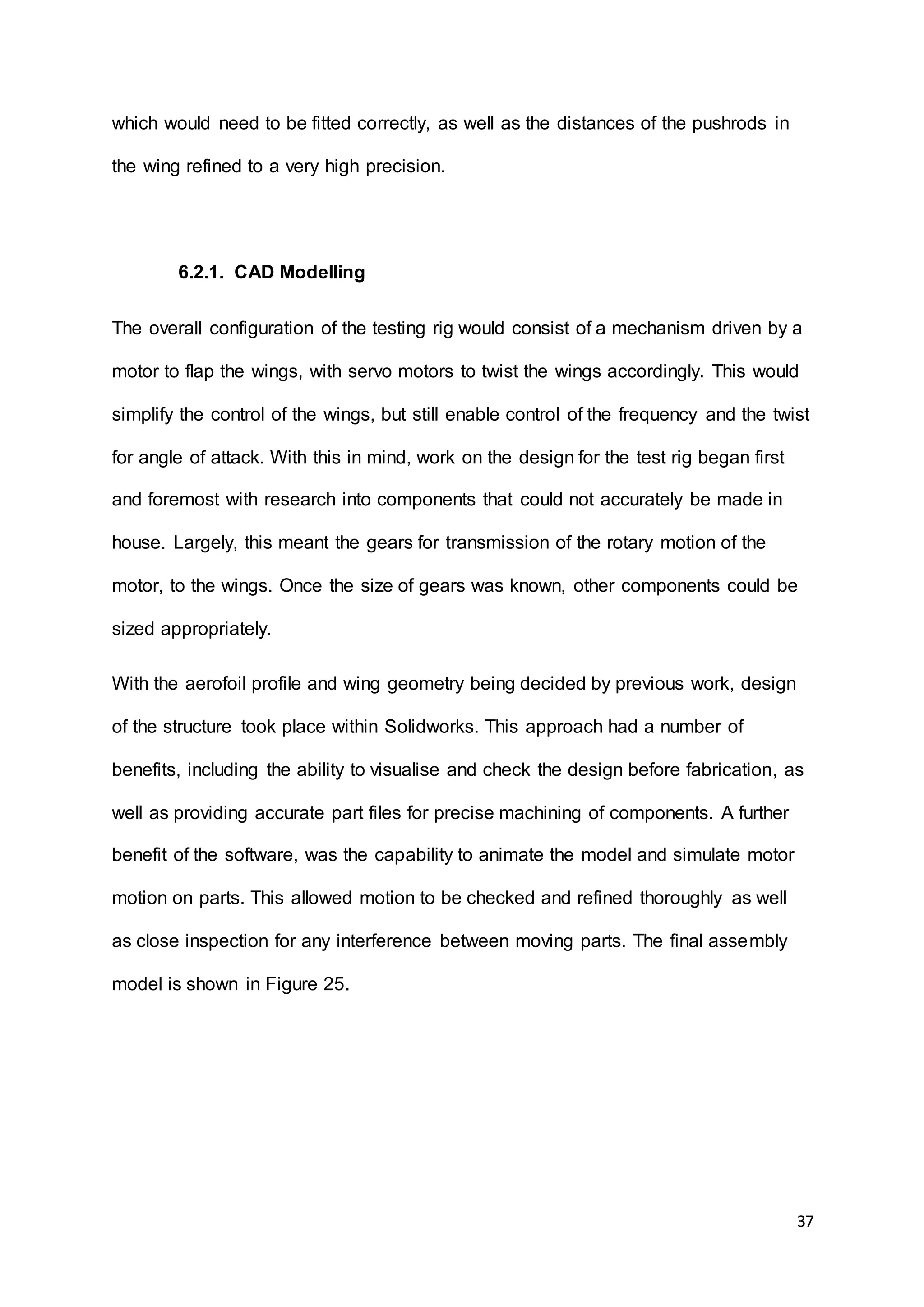
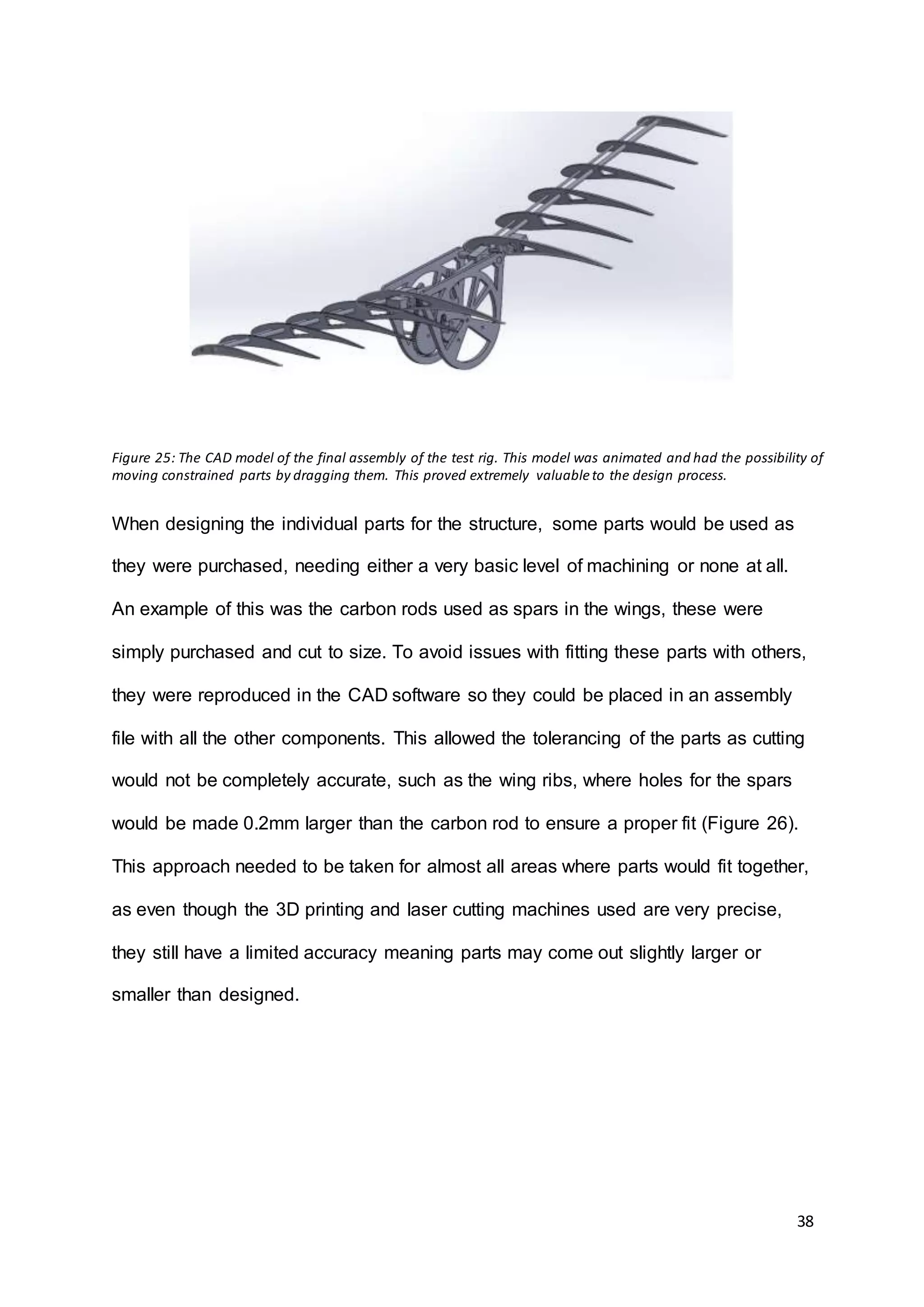
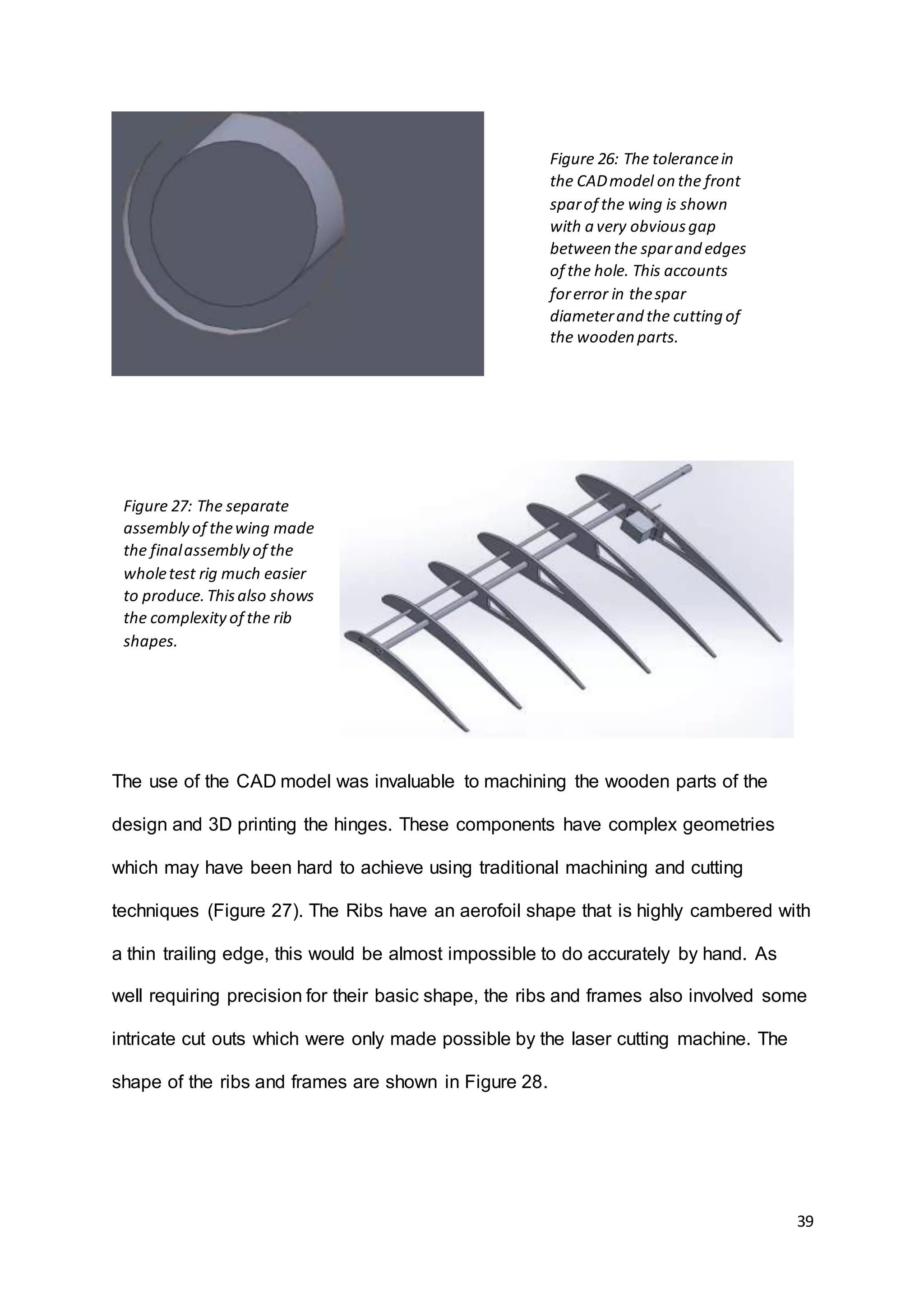
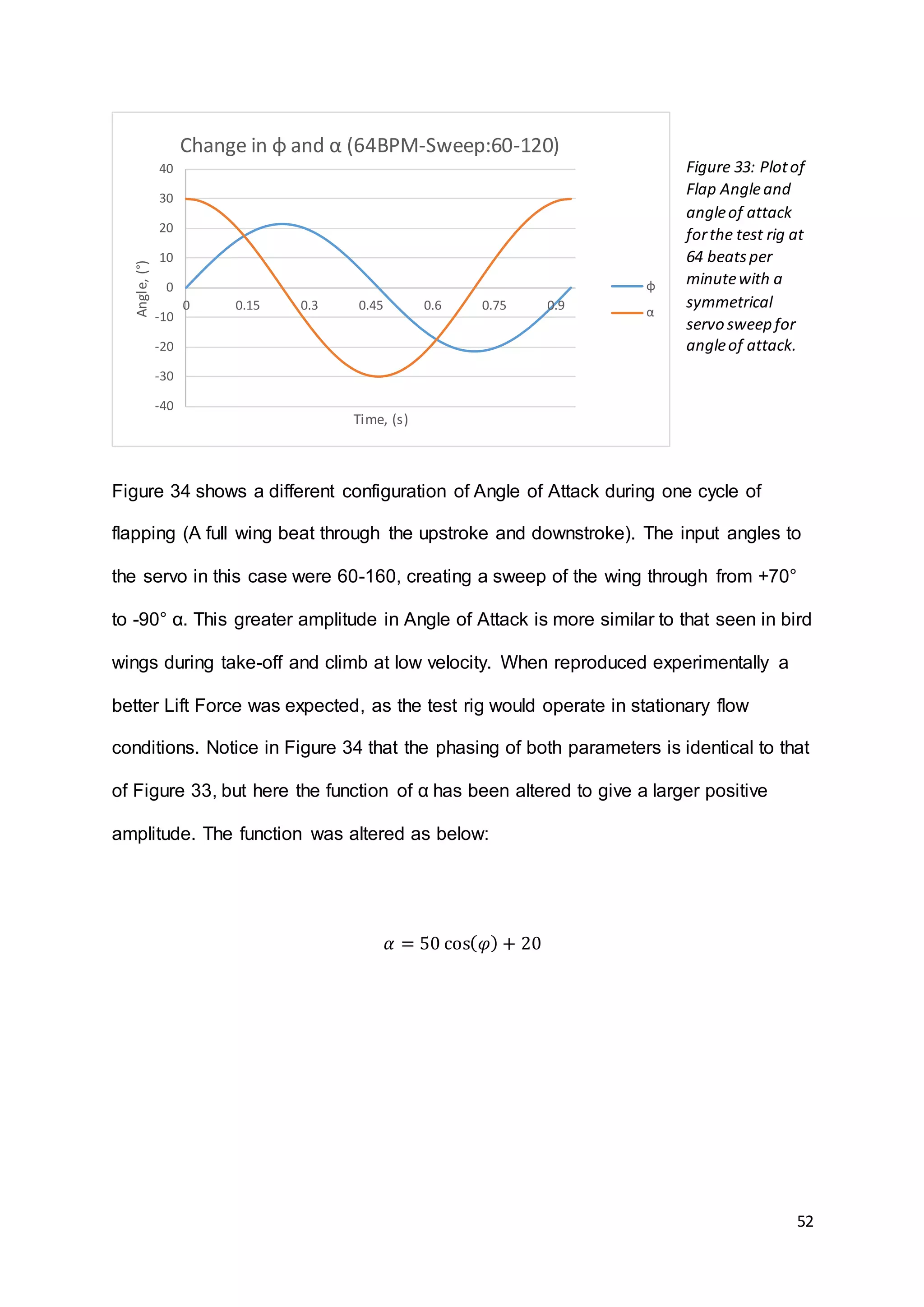
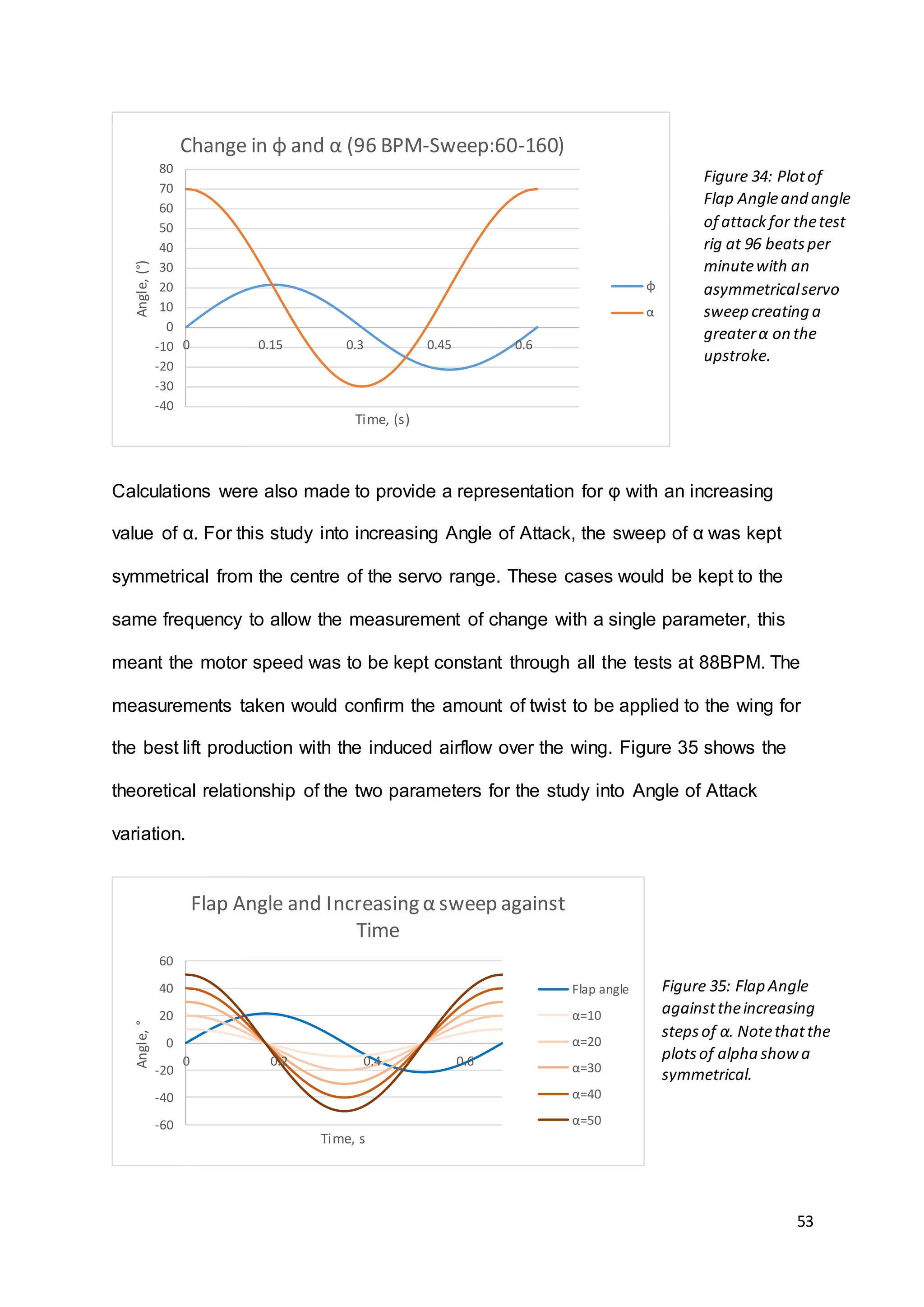
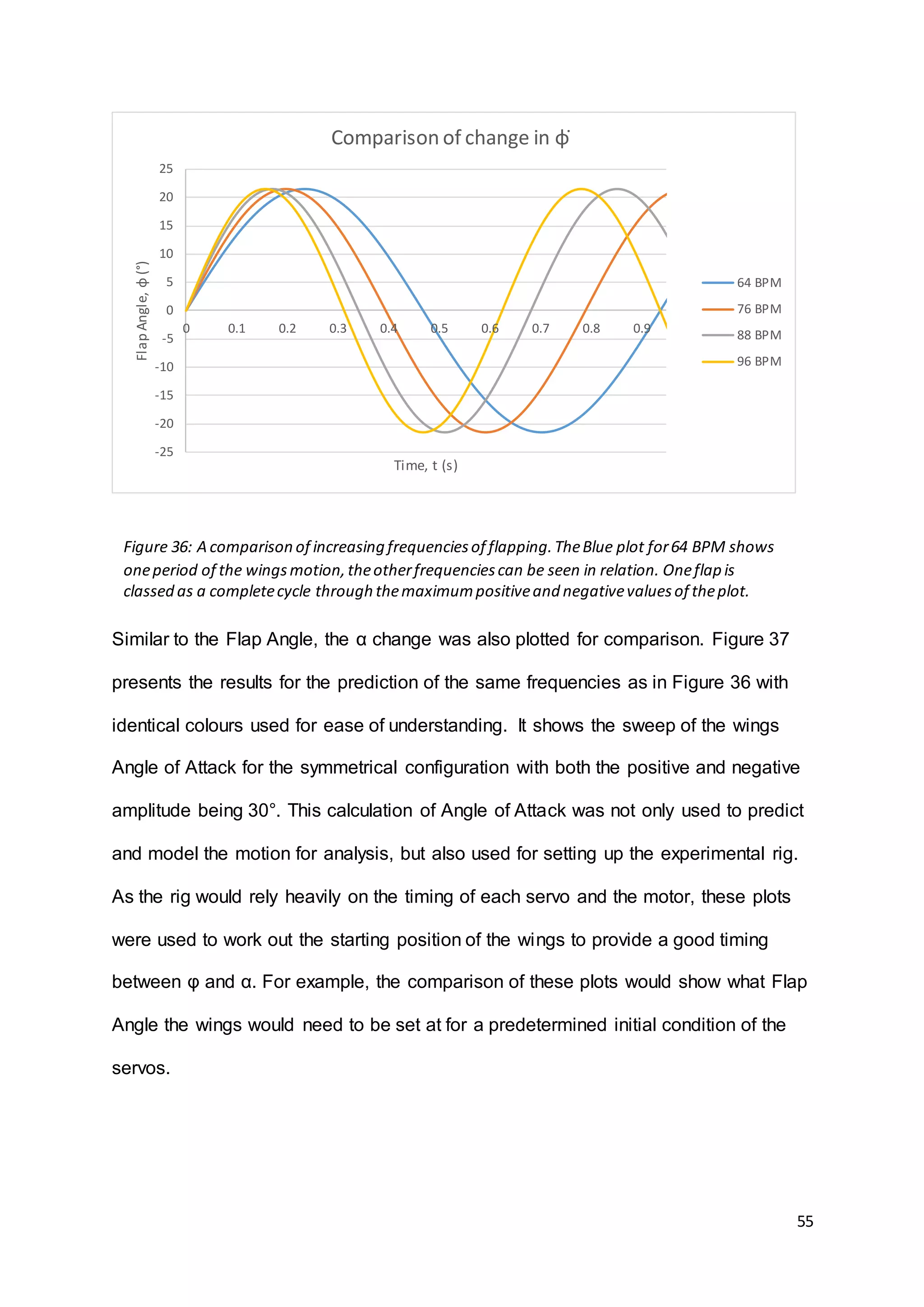
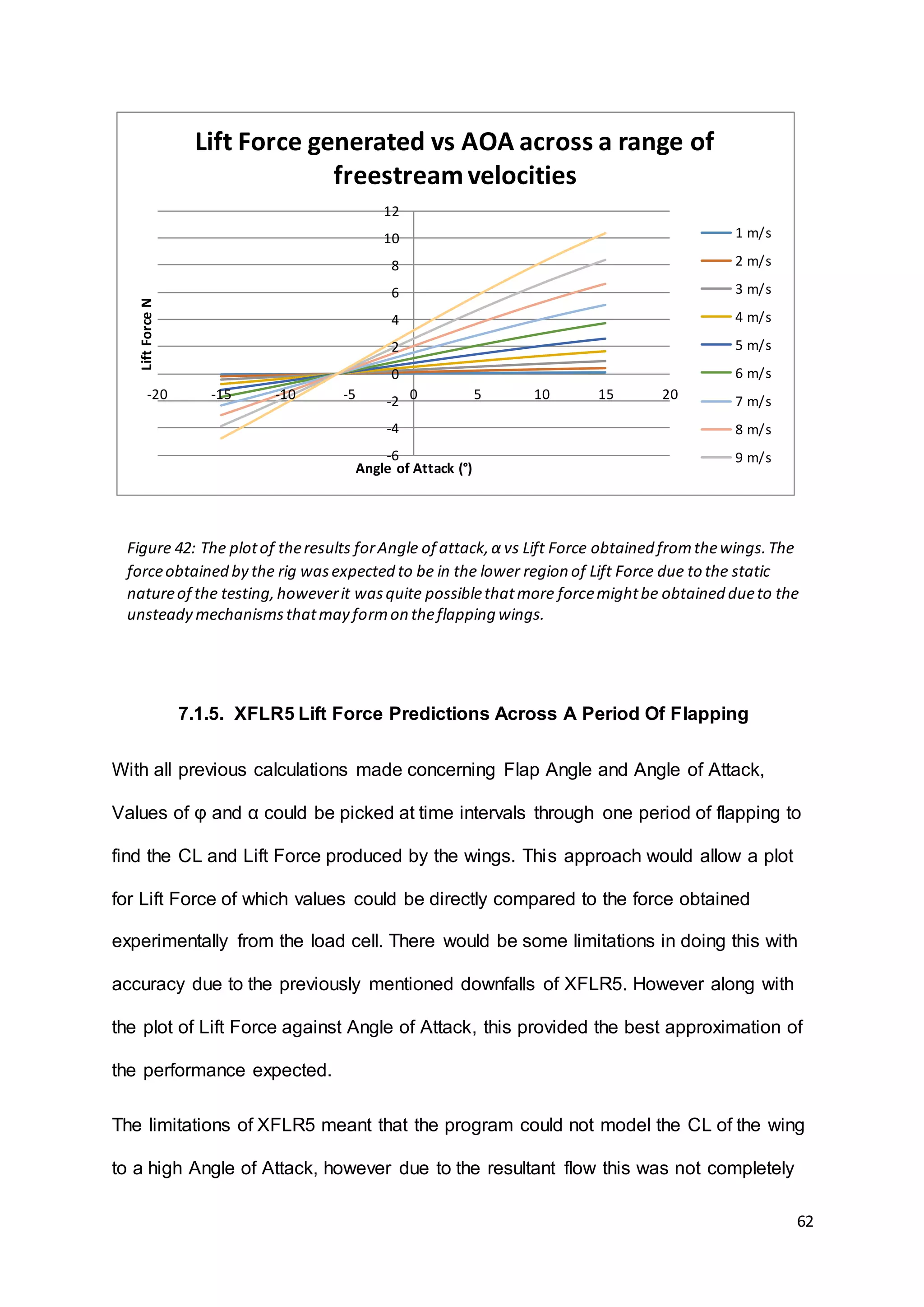
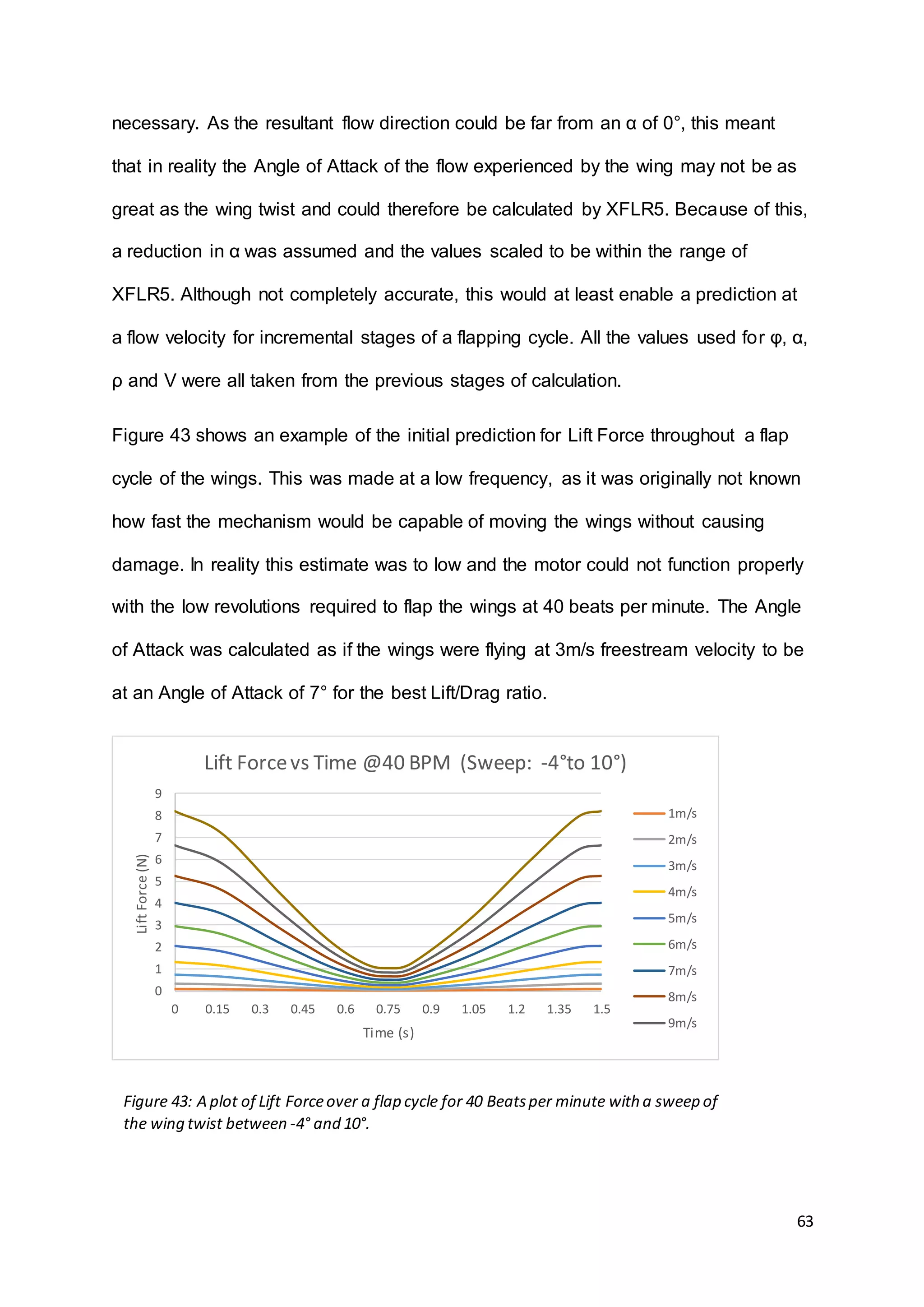
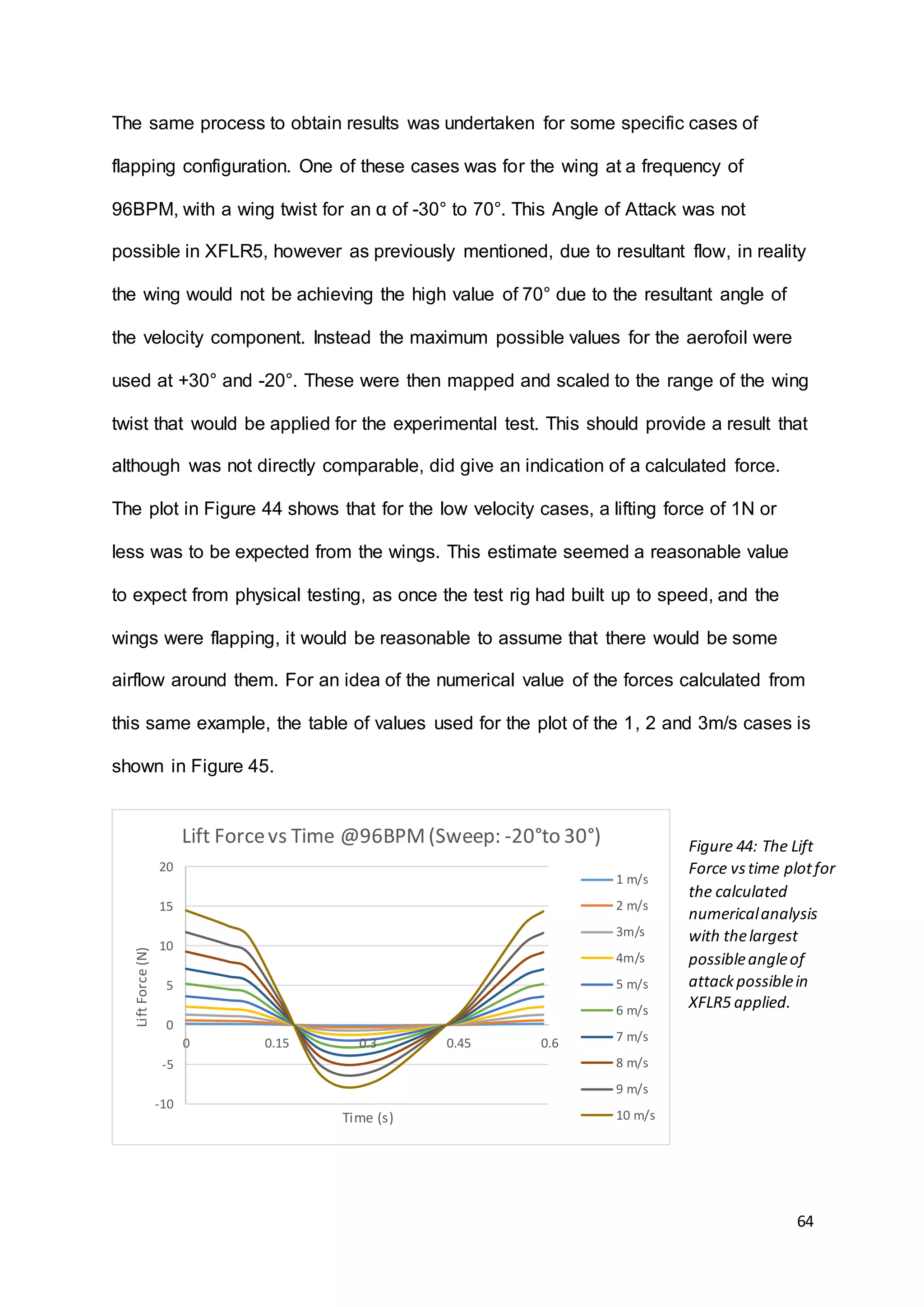
This document summarizes the design and results of a test rig to measure lift force generated by flapping wings. Numerical modeling was used to predict lift values based on wing geometry and motion parameters like frequency and angle of attack. An experimental test rig was designed and built with servo motors in the wings to control twisting instead of relying on flexibility. Force measurements from the rig were taken using a load cell as frequency and angle of attack were varied. Results showed that increasing frequency and angle of attack both increased lift force as expected based on the numerical predictions. The document provides context on bio-inspired flight and reviews other flapping wing projects to inform the design of the test rig.

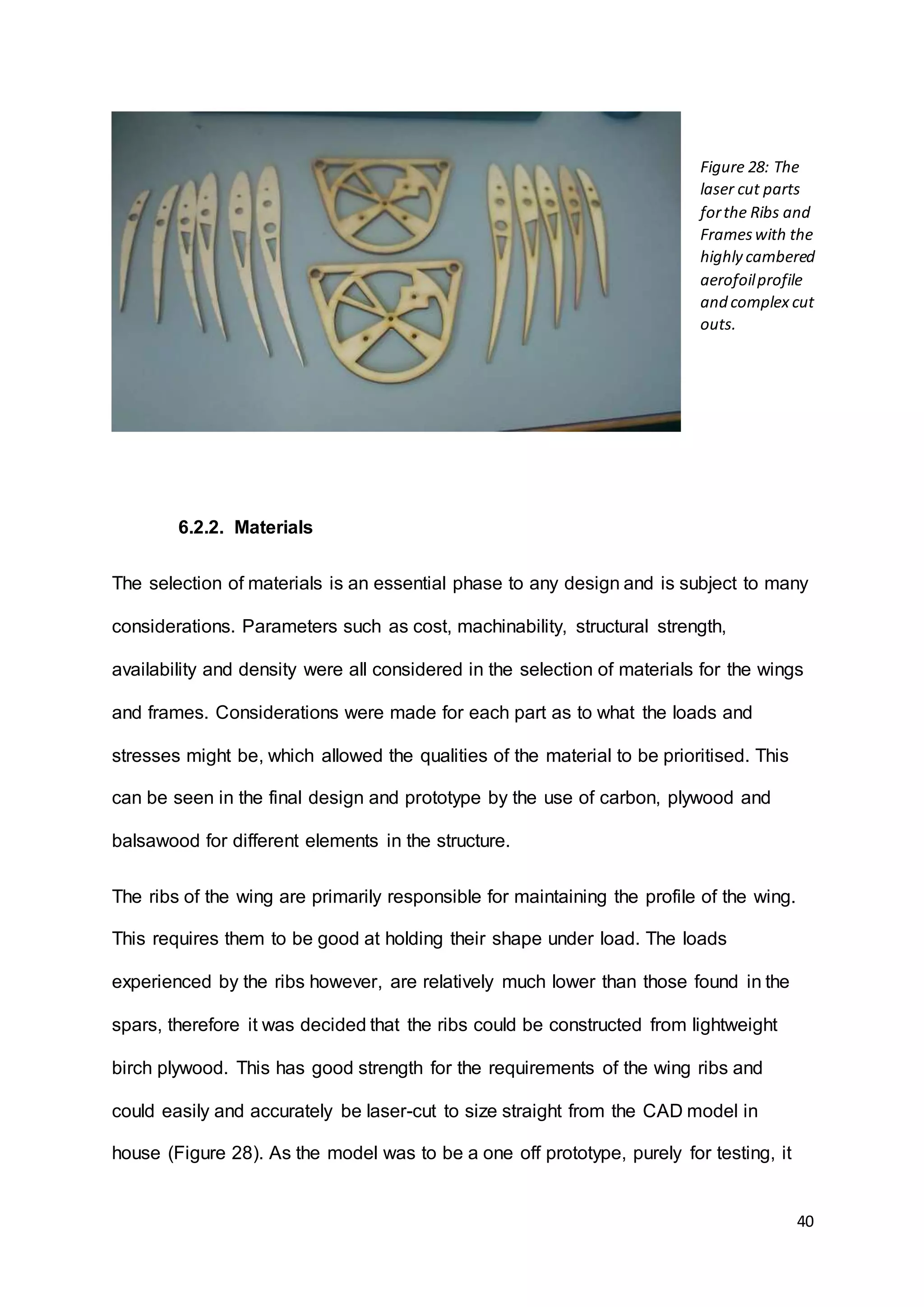
![8
helicopter system could not. It is this versatility which makes a viable Bio-Inspired
flapping wing vehicle a desirable asset for many applications.
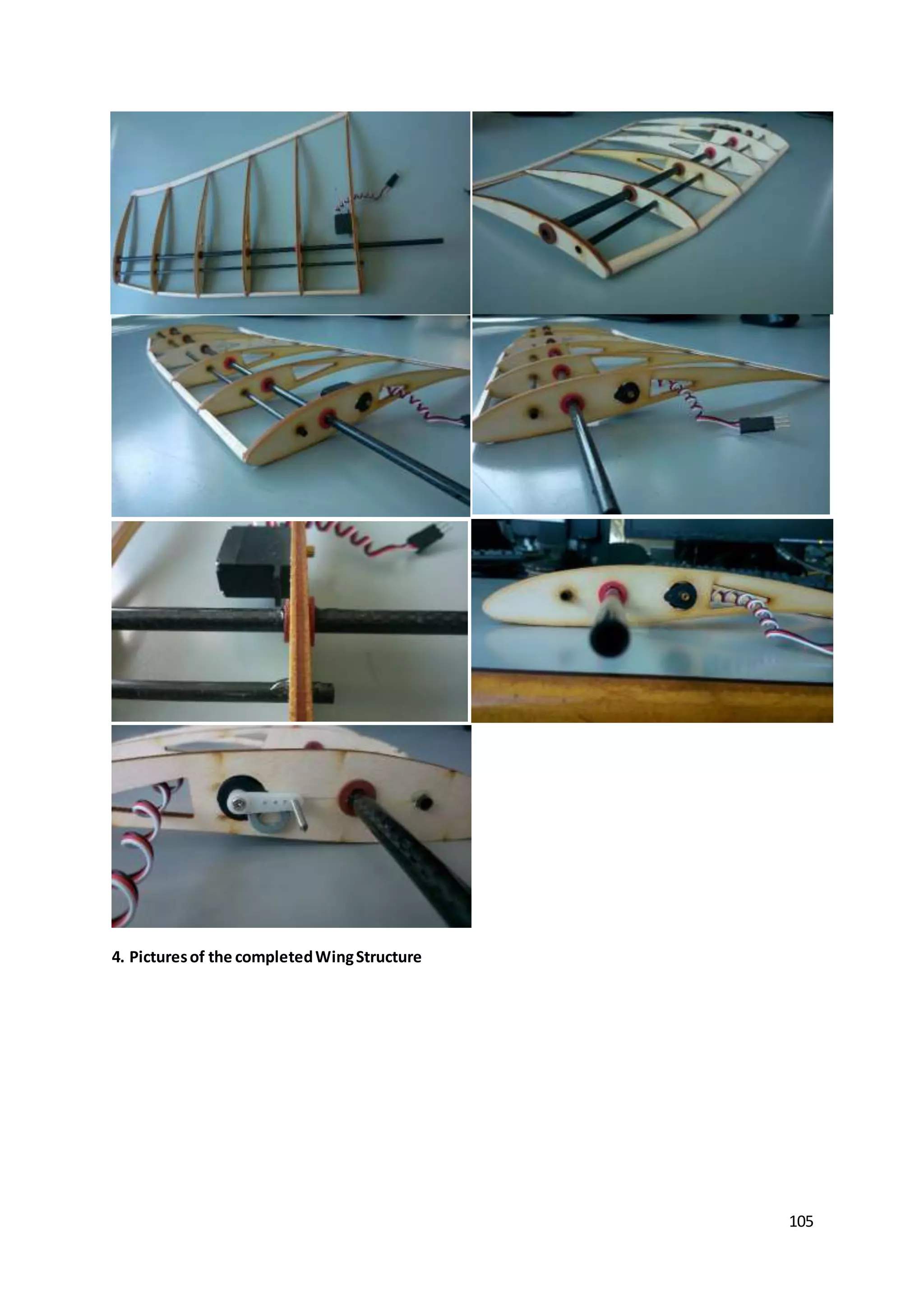
4.2. Objectives
The main focus of the project will be the measurement of Lift Force exerted by a pair
of flapping wings. Where natural examples use passive wing flexibility [1], which
provides the necessary characteristics to a birds wings relative to the conditions they
experience. The design of the test rig however will seek to use servo motors in built
to the wing to replace the need for wing flexibility and its complex design problems.
As much as possible, inspiration will be taken from biological examples with regard
to the shape of aerofoil used and wing geometry. Analysis of the wings will be
carried out numerically to obtain predicted values for Lift Force in the planned
studies for the increase in frequency and stroke Angle of Attack (α).
With results predicted for the test rig, the design will then be finalised and
constructed. This will seek to use, if possible the same material that would be used
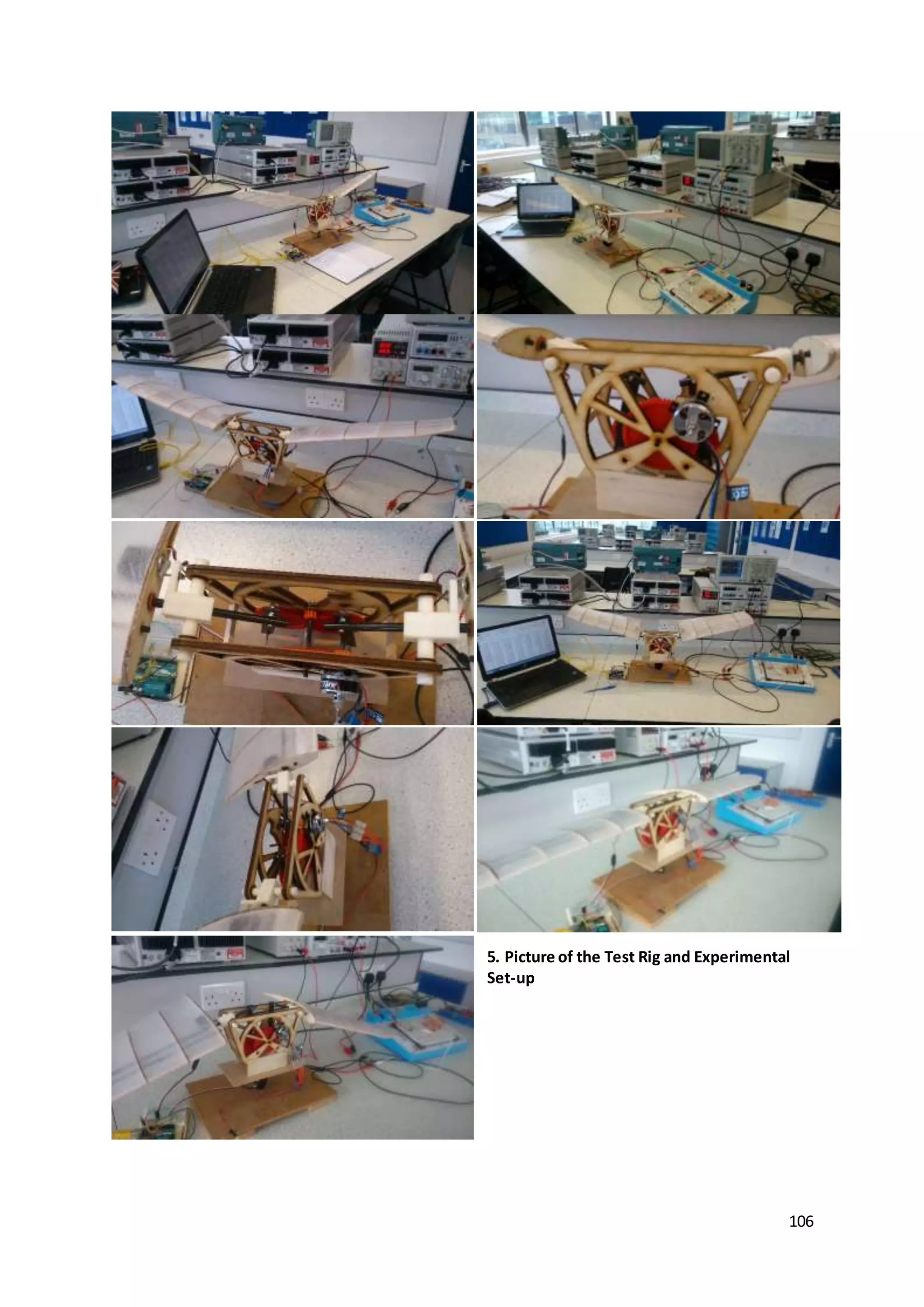
should the design be applied to a flight vehicle. The design of the test rig will
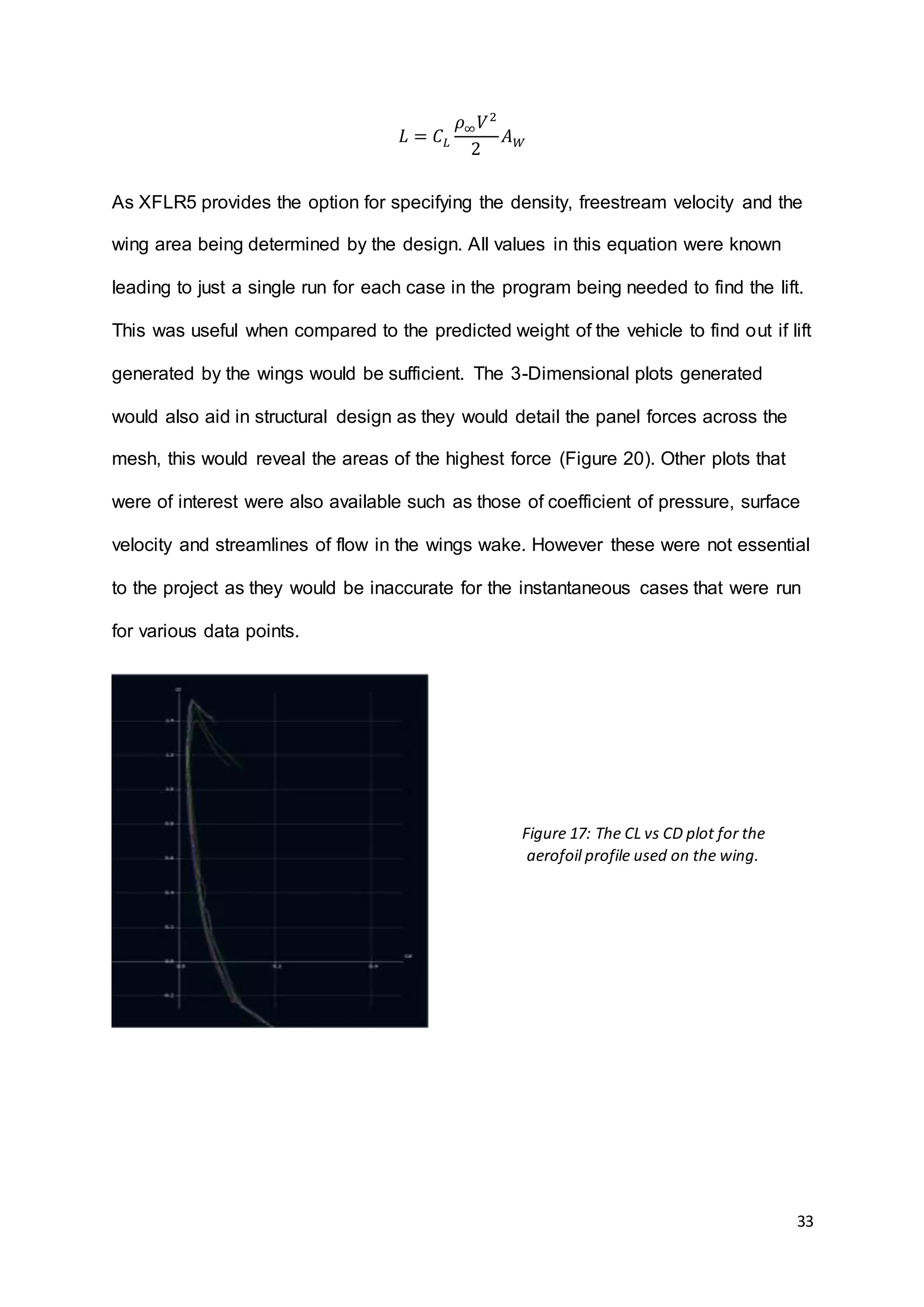
incorporate a pair of wings each with an internally mounted servo in order to twist the
wing, as well as a frame which will hold the wings, motor and mechanism necessary
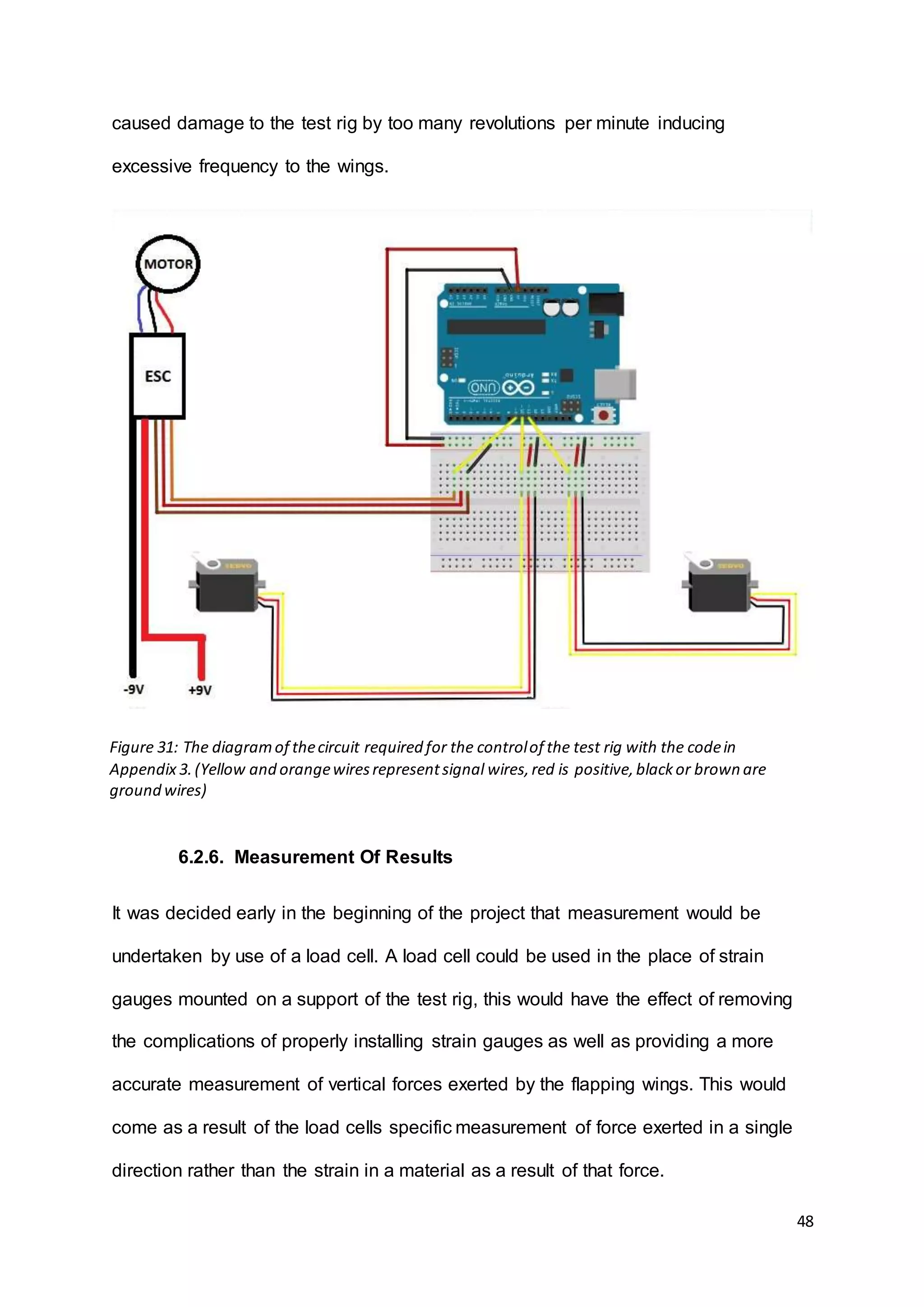
for their flapping motion. Control will be achieved with the use of an Arduino board,
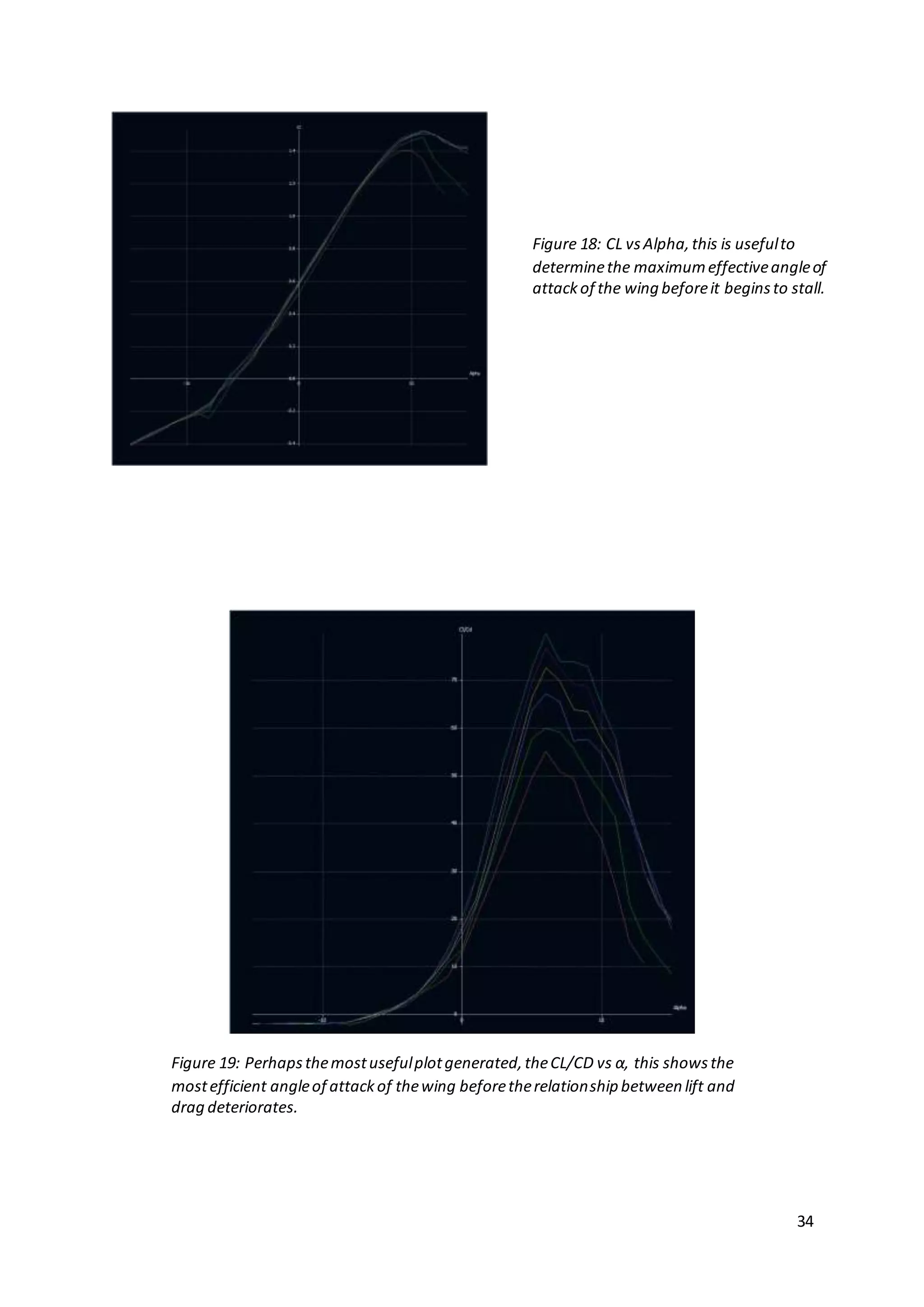
this was selected due to the ease of controlling servos and a brushless motor.
The measurement of the results experimentally will be achieved by the use of a load
cell. This decision was made through the experience of the inadequacy of strain
gauges mounted on a stand holding the test rig. This would allow force to be
measured in a single direction with the direct output relationship to force being
extremely attractive with regard to the processing time of results. The load cell would](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-8-2048.jpg)
![10
alongside the wing geometry. XFLR5 can then analyse the wing using data from an
aerofoil analysis, which is also conducted in the software, to produce values for CL.
The second method of obtaining Lift Force will be using equations and methods used
in previous work and applying these to the predicted changes in the parameters of
Flap Angle (φ) and α.
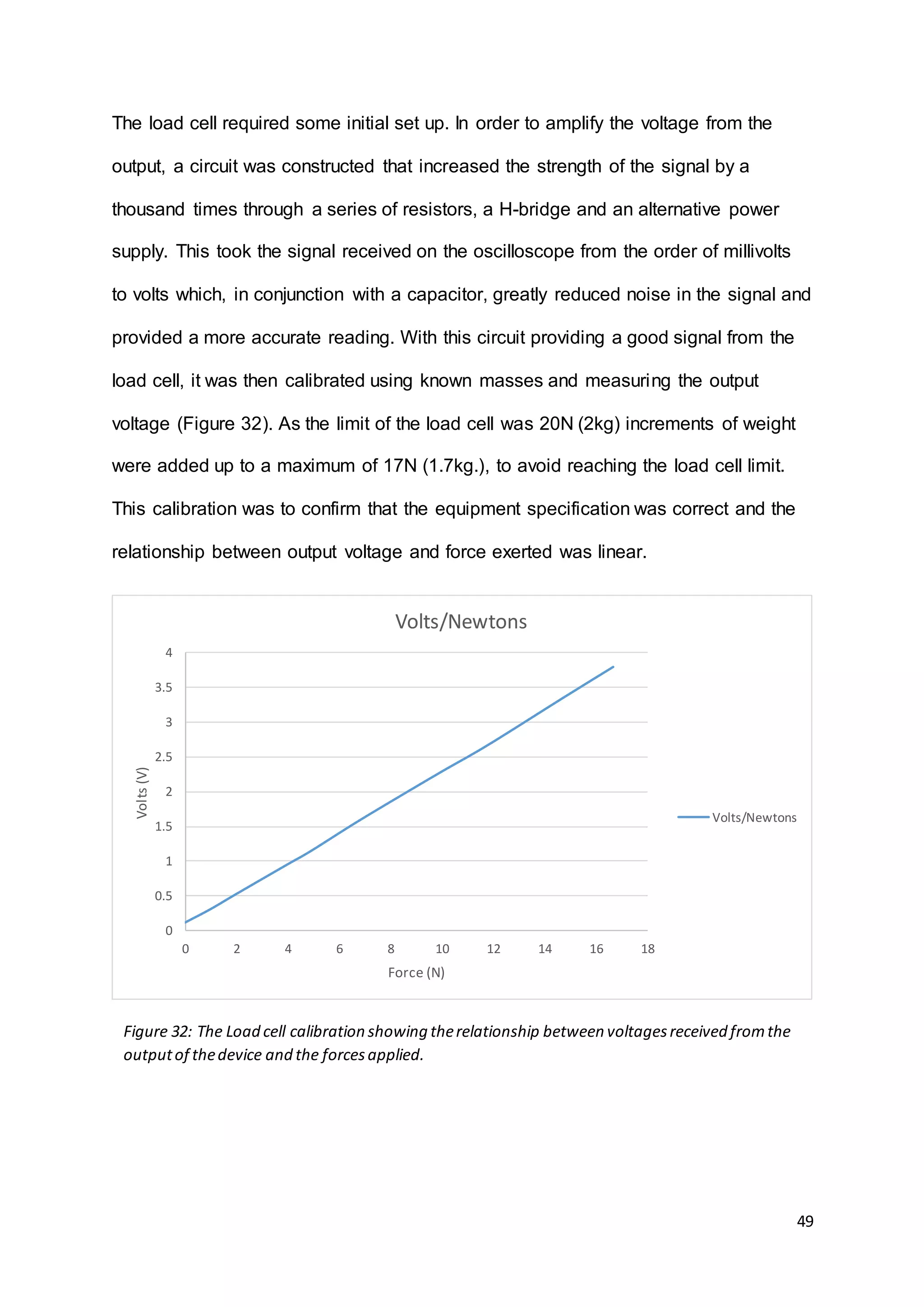
The measurement of experimental data will be done over two studies. The first will
be the increase in frequency over two different Angle of Attack configurations. One
with a symmetrical movement between identical values of positive and negative α.
The other with a high positive Angle of Attack with the aim of creating a more
efficient pattern of movement. The second study will be into the Angle of Attack
achieved at the peak velocity point of the downstroke, this will aim to determine if Lift
Force is increased with a larger negative α or to find its optimal value. The result of
each set case for testing will be analysed using the same method as used by Sane
S.P. (2001) [2] where multiple wing strokes are taken and averaged into a dataset for
a single wing stroke.](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-10-2048.jpg)
![11
5. Literature Review
5.1. Notable Projects
5.1.1. Festo Smartbird
Perhaps the most successful attempt at recreating bird flight, this example uses a
lightweight carbon structure, weighing only 450grams with a wingspan of nearly
2meters. A high gearing ratio between the motor and the mechanism ensures that a
relatively small motor can drive its wings. The key feature of the Smartbird is the
active torsion designed into its wings. This consists of a servo mounted towards the
wing tip, on the outer most wing rib. This is connected to a microcontroller to
calculate the input from information drawn from an array of sensors for acceleration,
torsional force on the hand wing, and motor position. Data acquired from testing,
provides the relevant information in order to position the hand wings to twist into an
optimised position for the current flight conditions and phase of wing motion [3]. This
approach brings this design closer to its natural inspiration than any other design;
with it not only mechanically replicating the movement and motion of the bird’s
skeleton and muscles, but also replicating the bird’s sensory system by the various
on-board sensors. Festo has also undertaken other projects with flapping wings
drawing inspiration from dragonflies and butterflies in some of its other notable
Bionic Learning Network projects, known as the BionicOpter [4] and
eMotionButerflies [5].](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-11-2048.jpg)
![12
5.1.2. Clear Flight Solutions: Robirds
Designed as a deterrent for nuisance birds around airports, waste and agricultural
sites [8], their manufacturer claims significant reductions in numbers of smaller birds
from repeated use in a given area [9]. However, they are not currently commercially
available and are still undergoing development. Unlike the Smartbird, the wings are
not articulated and do not contain servos to optimise twisting. They are however of a
flexible foam construction. A front and rear spar move to twist the chord of the wing
which provides lift and thrust. With regard to control, the Robirds do not have the
same aerodynamic turning effects with the tail and head moving together, however
enough manoeuvrability is still achieved for operation within an outdoor space.
Currently two types are being developed to replicate a peregrine falcon and an
eagle, which are still in the testing phase with an aim to make their flight completely
autonomous with an autopilot system. Perhaps not as technologically advanced as
the Smartbird, the Robirds do however have the speed to match their natural
equivalents, with a manufacturer’s claim of a 50mph top speed in the Falcon model
[10].
Figure 1: The Festo Smart bird [6] Figure 2: A CAD imageof the
Dragonfly inspired BionicOpter[7]](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-12-2048.jpg)
![13
5.2. Bird Wing Profiles
Various attempts have been made to model bird wing profiles, however this proves
challenging in practice. A number of approaches have been tried, but due to the
nature of avian wings and their unique flexibility to suit a range of flight profiles, great
effort is required in order to obtain a profile for even one flight state. One initial
approach was to take measurements from museum specimens [11] and treat these
as fixed aerofoils rather than a highly deformable bird wing. However this method is
inaccurate due to the necessary process of preservation. Recently deceased
specimens [12] also experience problems in the uncertainty in what flight conditions
the wing was last set for. Even without these effects, errors would still occur as when
a bird is in flight, its sensory system is constantly optimising the wing through
differing flight stages [13]. Therefore the variables the wing experienced most
recently would be unidentifiable. Through this, the optimum method utilised is to
measure the wing whilst in flight. One such method by the Oxford department of
Zoology used a trained bird and photogrammetric techniques in order to pin
coordinates to points on the wing to model the inner surface. This was done by
setting up a series of six cameras around a known control volume containing a perch
on which the trained steppe eagle would land [14]. This meant measurements were
taken in a rapid pitch up manoeuvre from a shallow glide into a stall to land. Similar
work to this had already been undertaken, however this involved smaller birds in
Figure 3: The Clear flight solutions
Falcon model.The wing shapeplays
a large partin its successasa bird
deterrentwhich when flapping looks
similar to the real bird. [8]](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-13-2048.jpg)
![14
wind tunnels with sparrow [15] and starling [16] test subjects. The use of smaller
birds provides little insight into Reynolds number regimes that would be experienced
by MAV’s built with current technology, as it is unlikely that a smaller bird species
could be replicated.
5.3. Bird Wing Anatomy
Although in many ways very different, the avian wing demonstrates numerous
similarities to the human arm [17]. Both in bone structure and the associated
muscles to drive movement. There are recognisable shoulder, arm and hand
sections to the bone structure, with the hand wing forming the significantly larger
area towards the tip of the wing containing the primaries [17] (primary feather group-
the largest feathers on the wing). The feathers attached to the arm wing are known
as the secondaries [17]. Unlike in a human arm, the arm wing in a bird accounts for
less than half of the total wing span. Other feather groups are known as the coverts
and the scapulars, with the coverts forming the feather covering of the leading edge
and the centre of the wing surface. Other notable similarities between birds and
humans is the presence of pectoral muscles used for flapping the wings down [18],
humans have similar muscles in the chest used to move their arms forward and
together.
Figure 4: The profiles thatresulted
fromthe photogrammetricstudy
undertaken by theOxford department
of zoology of a Malesteppe eaglein a
high pitch up manoeuvre.[14]](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-14-2048.jpg)
![15
5.4. Models For Flapping Wings
In order to design an optimised flapping wing MAV with the flight characteristics of a
real bird, the problem has to be numerically understood. Considerable work has
been done on the angle of attack, flap angle, and wing beat frequency, as well as
four unsteady mechanisms that frequently occur, and various other variables
associated with not only airflow but also a constant movement of the wings. Four
unsteady mechanisms cited frequently in literature are leading edge vortices, rapid
pitch up, wake capture and clap and fling [20]. These mechanisms are typical of
problems faced as they clearly aid in lift production in insects and birds but are
difficult to predict for variations with current methods of analysis. In further detail,
these models are described as follows:
5.4.1. Leading Edge vortex (LEV)
A flow of air created around the front of the wing which rolls over the leading edge
during the downstroke. The low pressure at the centre of the vortex creates a suction
force that attaches it to the wing during the stroke and increases the possible angle
of attack before stall is induced. This creates higher lift than is normally obtainable by
the same wing and enhances the performance of the wing over its capabilities in
Figure 5: the labelled arrangement
of featherson a bird wing. [19]](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-15-2048.jpg)
![16
steady state flow. The vortex has been found by studies to be conical in shape,
having a smaller radius towards the root of the wing and much larger diameter at the
wing tip. This is due to the increases in the wings tangential flow velocity along the
span. This mechanism has been identified as the most significant in flapping wing
flight to increase the lift, however observations vary as to the LEV’s behaviour on
different wings. In some cases it is seen to be permanently attached, whereas in
other cases it sheds and reforms with each beat.
5.4.2. Rapid Pitch Up
A quick rotation at the end of each stroke, where the wing moves from a low to high
angle of attack, generating much higher lift coefficients than the steady state stall
value [20].
5.4.3. Wake Capture
Occurs as a wing travels through the wake it created on a previous wingbeat.
Research has shown peaks in aerodynamic force when the wake of a previous wing
beat is captured with correct phasing and twist of the wing [20].
5.4.4. Clap And Fling Mechanism
This refers to the way the set of wings are moved during the wingbeat. The majority
of birds do not use this type of motion in normal flight, however some, such as the
hummingbird could be described to use a clap and fling motion. More applicable to
insect flight, this model for wing movement describes the upward motion (the clap),
where the wing leading edges are clapped together at the end of the upstroke. The
downstroke consists of the leading edges moving apart whilst the trailing edge
remains stationary, therefore the wing rotates around the trailing edge. This is known
as the ‘fling’ [19].](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-16-2048.jpg)
![17
5.5. Useful Equations
For the Numerical Analysis of the project there are some papers for work previously done
that provide good methods and equations that could be applied. These studies carried out
are notably those by Whitney J.P (2001) [22], and Dickinson M.H. (1999) [23]. Both provide
good relationships to be followed and good approximations of CL and CD to be applied to
flapping wings.
The Study by Whitney [22] focuses on conceptual design of MAV’s with no practical work
undertaken. A large focus of the paper is on the hovering energetics and predicting the flight
performance such as the range and speed of the vehicle. However, of interest to this project
is the work undertaken to predict the damping force and the relationship produced between
φ and α (Figure 7). This would be useful to predict the timing of the parameters of the test rig
wings and apply further calculations to obtain the wings lifting force as a function of the
theoretical angle of attack.
Figure 6: The clap and fling
mechanism,herethe diagramsare
shown asif looking fromabovethe
insect/ bird and the circular ends
representthe leading edge of the
aerofoil.[21]](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-17-2048.jpg)
![18
The second study by Dickinson [23] produces approximations for CL and CD in flapping
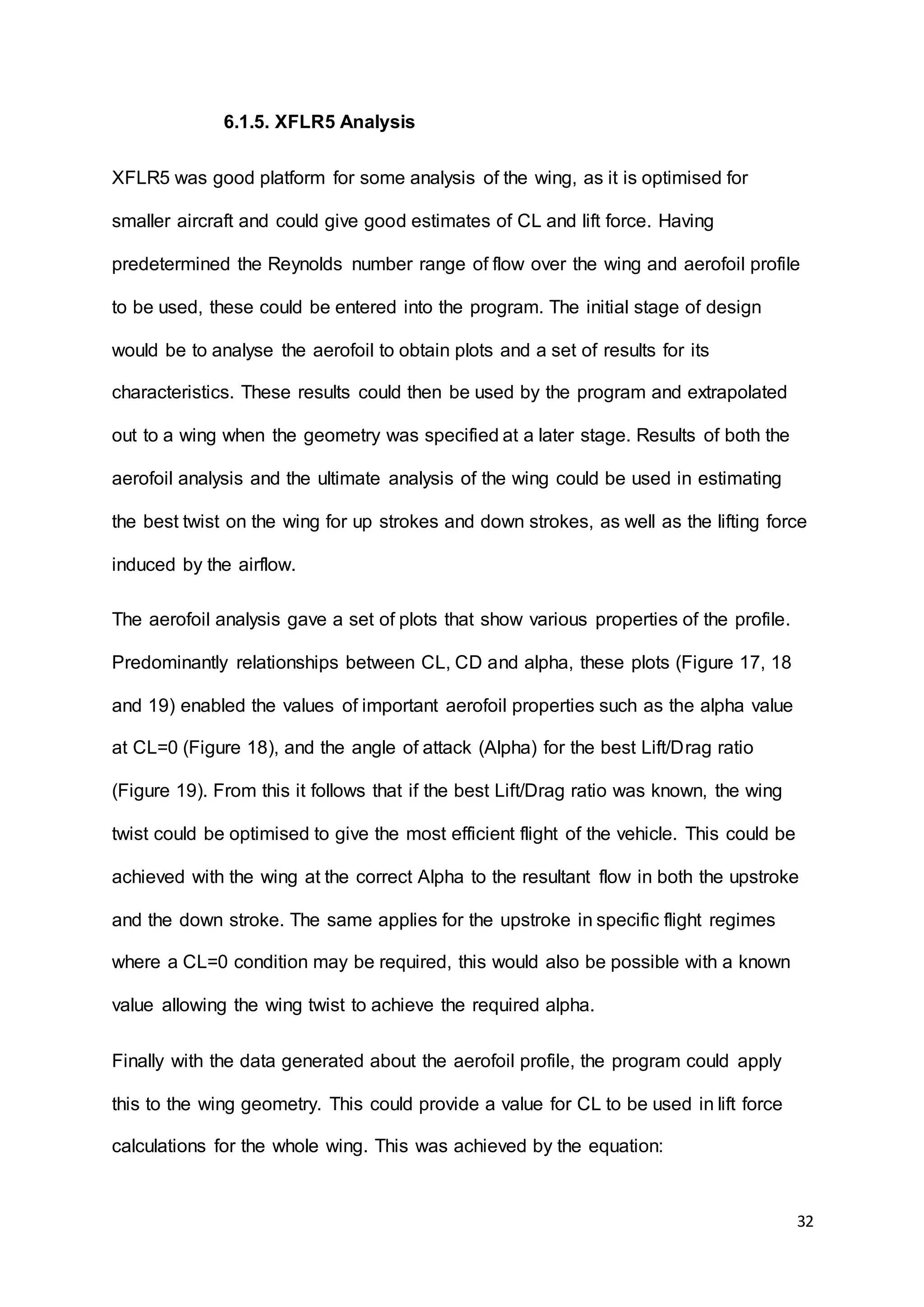
wing applications (Figure 8). More importantly these are a function of α which due to the
planned servos in the wings, is easy to control. To obtain a theoretical lift force, these
equations can be applied to the predicted or actual α to find an approximation. The CL value
could then be used in conjunction with the lift equation in order to provide a predicted or
theoretical Lift Force.
𝐶𝐿 = 0.225 + 1.58sin(2.13𝛼 − 7.2)
𝐶𝐷 = 1.92 − 1.55cos(2.04𝛼 − 9.82)
𝐿 = 𝐶𝐿
𝜌𝑉2
2
𝐴
Figure 7: Top: J.P.
Whitney projectsthe
theoretical relationship
between φ and α n his
design.Moreof interest
is the phasing of both
sets of motion which
follow a sinusoidal
relationship.This timing
would be good to
replicate in the
experimentalsection of
the project.
Bottom:The plotof
damping forcewith α,
this is the force thatacts
againstthedriving
mechanism. [22]
Figure 8: The approximationsmadeby Dickinson in his workwith the Lift equation
presented below.With a way of measuring Density and velocity aswell as the angle of
attack,theseequationscould beapplied asin workby SaneS.P.[2] to the physicaldata
gathered fromthetest rig and compared to actual values.](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-18-2048.jpg)
![19
5.6. Flexibility In Flapping Wings
When comparing wings of aircraft to those found in the natural world, one of the
main differences is the flexibility of bird and insect wings. Insects are typically
characterised with very thin transparent wings with an intricate vein structure to add
rigidity. Whereas bird’s wings consist mostly of feathers with a minority of the wing
surface area being taken up by the bone structure and muscular makeup necessary
for flapping. Feathers typically have a stiff spine to them however this is still not
completely rigid, which allows for a flexible wing. Although studies into natural flyers
initially focussed on defining wings as rigid, studies have now been undertaken to
determine the effects of flexibility.
It has been found that trailing edge flexibility has a considerable effect on the wing
aerodynamics. When a rigid wing translates at a high angle of attack, the leading
and trailing edge vortices periodically generate and shed as found in the results of
(Zhao, et al, 2010) [24]. A wing that has an optimised flexible trailing edge, however
can generate a smaller but much more stable leading edge vortex, with some
parameters out performing rigid wings when used in flapping configurations [24].](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-19-2048.jpg)
![20
6. Chapter 1: Methods and Design
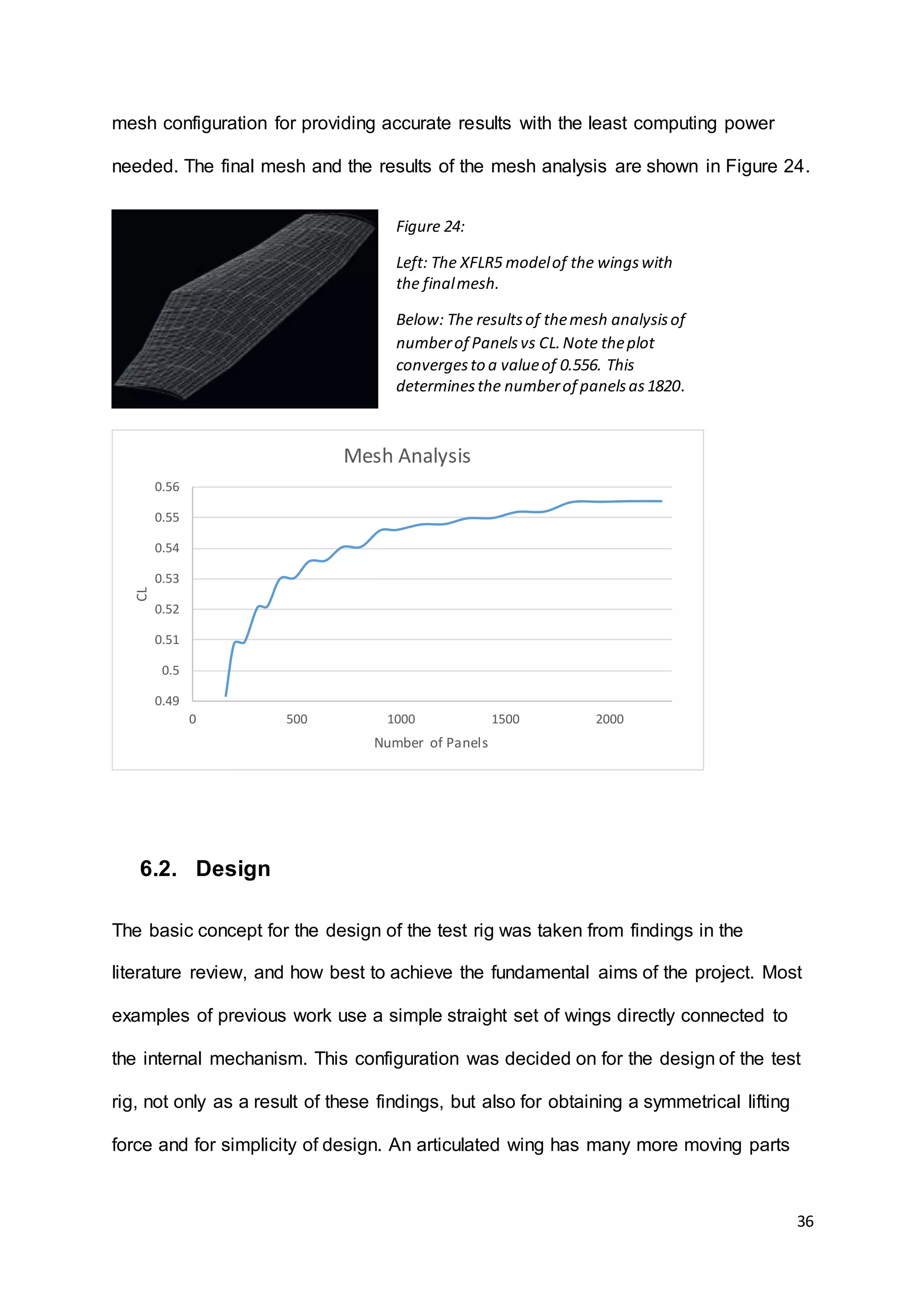
6.1. NumericalModelling
Before designing a test rig and wing structure, a numerical analysis of the problem
had to be made. This would provide an indication of the forces acting on the wing. It
was necessary to make calculations, as a critical element to designing a vehicle with
flapping wings would be the lift and thrust achieved, compared to the weight. An
initial estimate for a vehicle weight of 400g was made based on weights of the
notable projects studied in the literature review, most specifically the Festo Smartbird
was considered due to a wealth of information available [3]. With this estimation in
place, the task was to produce a wing and carry out appropriate sizing to produce
adequate lift to support the vehicle in flight. Initial work involved research into
aerofoils, which led into a determination of the Reynolds flow regime the wing would
operate in, this would then be used in XFLR5 to provide results with greater
relevance to a vehicle of the design size. Further theoretical work then required
calculations for resultant flow velocities to find the velocity of induced flow due by
flapping of the wings. This could then be used in XFLR5 to attempt to estimate for lift
force achieved by the test rig at a specific flapping frequency and Angle of Attack
during strokes.
6.1.1. Aerofoil Selection
When selecting a profile for the wing, several considerations had to be made. Firstly
as the project would draw inspiration from biological applications, the profile of the
wing should reflect that of those found in the natural world. Secondly, there would
not be the time or the need for developing a profile unique to the project as a large
variety of aerofoil shapes are readily available for public use. Another consideration](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-20-2048.jpg)
![21
would be the strength of material the sections would be constructed from and
tolerances involved with cutting the wing ribs to that profile. These limitations and
criteria required considerable research in order to ensure the right profile was
chosen.
To better understand the characteristics of a bird wing aerofoil, the literature review
aimed to investigate papers where work had been done to obtain a cross section of a
bird wing in flight. The oxford department of zoology [14] achieved this successfully
using a series of cameras around a control volume to obtain an accurate model for
the inner wing of a trained eagle. The result of this study is shown below in Figure 9.
With these findings it was realised that the profile needed to be highly cambered and
have a large leading edge radius and thin trailing edge to correctly replicate the
natural wing. It would also be desirable for the aerofoil to be designed for Low
Reynolds number flow, as based on the vehicles dimensions, it would be expected to
operate somewhere between 𝑅𝐸 1 × 105
and 𝑅𝐸 2 × 105
.
After a search to find a selection of profiles that fitted the already mentioned criteria,
possible candidates were those shown in Figure 10. All aerofoils in this selection are
for Low Reynolds flow, and are highly cambered. The high camber is essential as
the vehicle is operating at low speeds in comparison to conventional aircraft, an
aerofoil with low camber would likely not generate enough lift. As the Reynolds
Figure 9: Aerofoil profiles obtained by
the oxford department of zoology. This
provided a good foundation for the
characteristics to look for in bird-like
aerofoils. [14]](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-21-2048.jpg)
![23
6.1.2. Determining Reynolds Number of The Flow Regime
For varying sizes of airborne vehicles, the flow regime that they experience changes.
This is measured by the Reynolds number of the flow. Commercial jets fly in the
regime of 𝑅𝐸 1 × 107
which is considered as high, birds and insects on the other
hand operate at 𝑅𝐸 1 × 103
− 𝑅𝐸 1 × 105
, with insects towards the bottom of the
scale and large birds at the top (Figure 11). Major work in the lower Reynolds
Figure 10: The aerofoil profiles considered for
the design. (1. FX60-100 10%, 2. GM15, 3.
GOE368, 4. GOE63, 5. GOE358, 6. Selig 1210
12%, 7. GOE500) [25]](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-23-2048.jpg)
![24
regimes has come about in recent times with the interest in Micro-Air Vehicles, small
unmanned aircraft similar in size to large birds do not experience the same effects as
a large aircraft and must be designed differently.
The flow regime can be determined by using the equation stated below which takes
into account the chord of the wing, and velocity of flight.
𝑅𝐸 =
𝜌𝑉𝑙
𝜇
=
𝑉𝑙
𝑣
Where:
𝑅𝐸 = 𝑅𝑒𝑦𝑛𝑜𝑙𝑑𝑠 𝑛𝑢𝑚𝑏𝑒𝑟
𝑉 = 𝑣𝑒𝑙𝑜𝑐𝑖𝑡𝑦
𝑙 = 𝑐ℎ𝑜𝑟𝑑
𝜌 = 𝐴𝑖𝑟 𝐷𝑒𝑛𝑠𝑖𝑡𝑦 (1.225
𝑘𝑔
𝑚3
)
Figure 11: A plot showing theReynoldsnumberagainstthespeed of airborne
body.Thisshowshowvariousapplicationscompare[26].](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-24-2048.jpg)
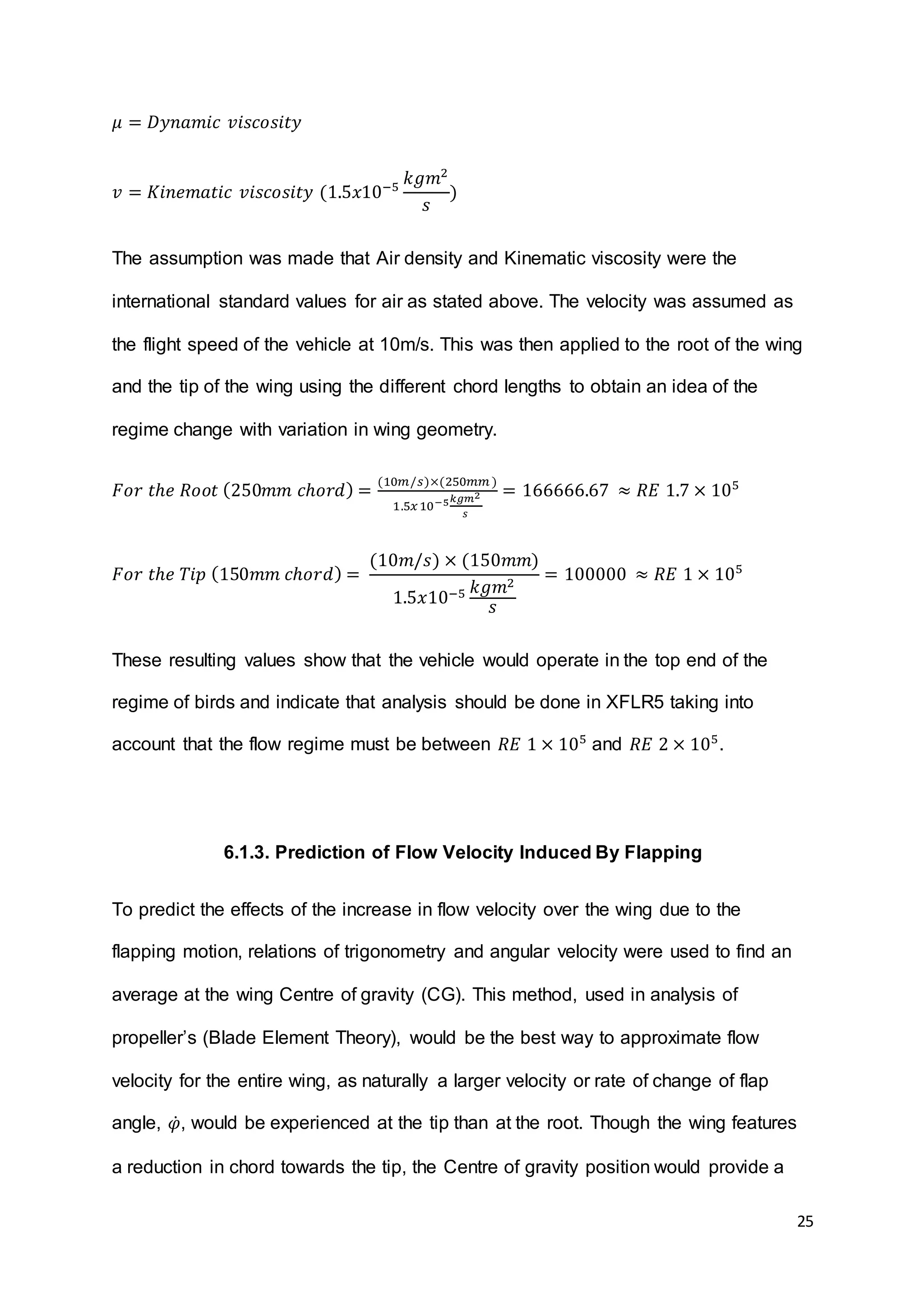

![28
Where 𝑟𝐶𝐺 is the distance of the wing span from the hinge to the wing CG.
With the values calculated it is possible to calculate the peak resultant flow velocity
over the wing by using the components of the downward or upward movement of the
wing CG and the free stream flow velocity. These calculations are identical to those
carried out for Blade element theory on aircraft propellers [27], this relies on the
simple trigonometry of an aerofoil moving at a constant velocity, perpendicular to a
freestream velocity generated by the flight speed on the vehicle. This in turn would
produce a resultant effective velocity acting at an angle offset to the freestream.
Although some previous studies have omitted these calculations, many were for
smaller insect like wings. Due to the span of the test rig wings it was felt that the
velocity induced by the wings through their fastest point at the horizontal position
may be significant. This peak velocity could have an effect on the peak lifting force
generated by the wings. This is of interest in this study as the peak force achieved
would give an indication into the feasibility of the concept being adapted to a flying
vehicle. In Figure 14 the components of the resultant velocity are shown.
Figure 14: A diagramto showtherelative direction of flow velocities acting
on the wing [28].
𝑉∞
WingCG
𝑉𝐶𝐺 𝑀𝐴𝑋
𝑉𝐶𝐺 𝑀𝐴𝑋
𝑉𝑅𝐸𝑆
Where:
𝑉∞: Free StreamVelocity
𝑉𝐶𝐺 𝑀𝐴𝑋
: Vertical Velocityof WingCG
𝑉𝑅𝐸𝑆: ResultantVelocity
𝛼 𝑅𝐸𝑆: Angle of the Resultantvelocity
fromthe free stream
𝛼 𝑅𝐸𝑆](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-28-2048.jpg)
![29
In order to obtain the resultant flow velocity over the wing and its resultant angle, it
was simply a matter of applying Pythagoras, using a given velocity of the freestream,
and trigonometry to find its angle. Below calculations would provide the final inputs
for XFLR5.
𝑉𝑅𝐸𝑆 = √ 𝑉∞
2
+ 𝜑̇ 𝑀𝐴𝑋
2
And
𝛼 𝑅𝐸𝑆 = sin−1
(
𝜑̇
𝑉𝑅𝐸𝑆
)
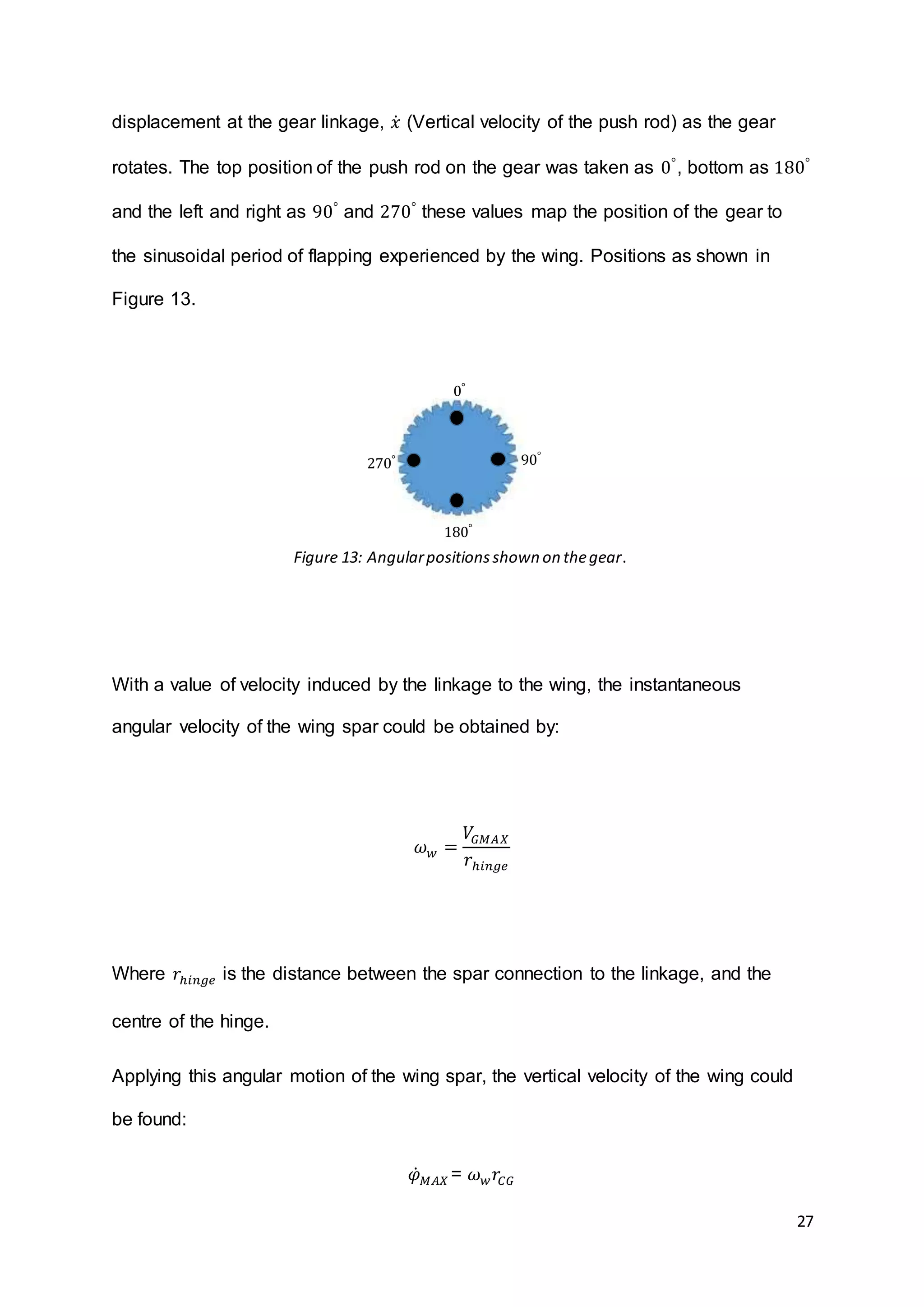
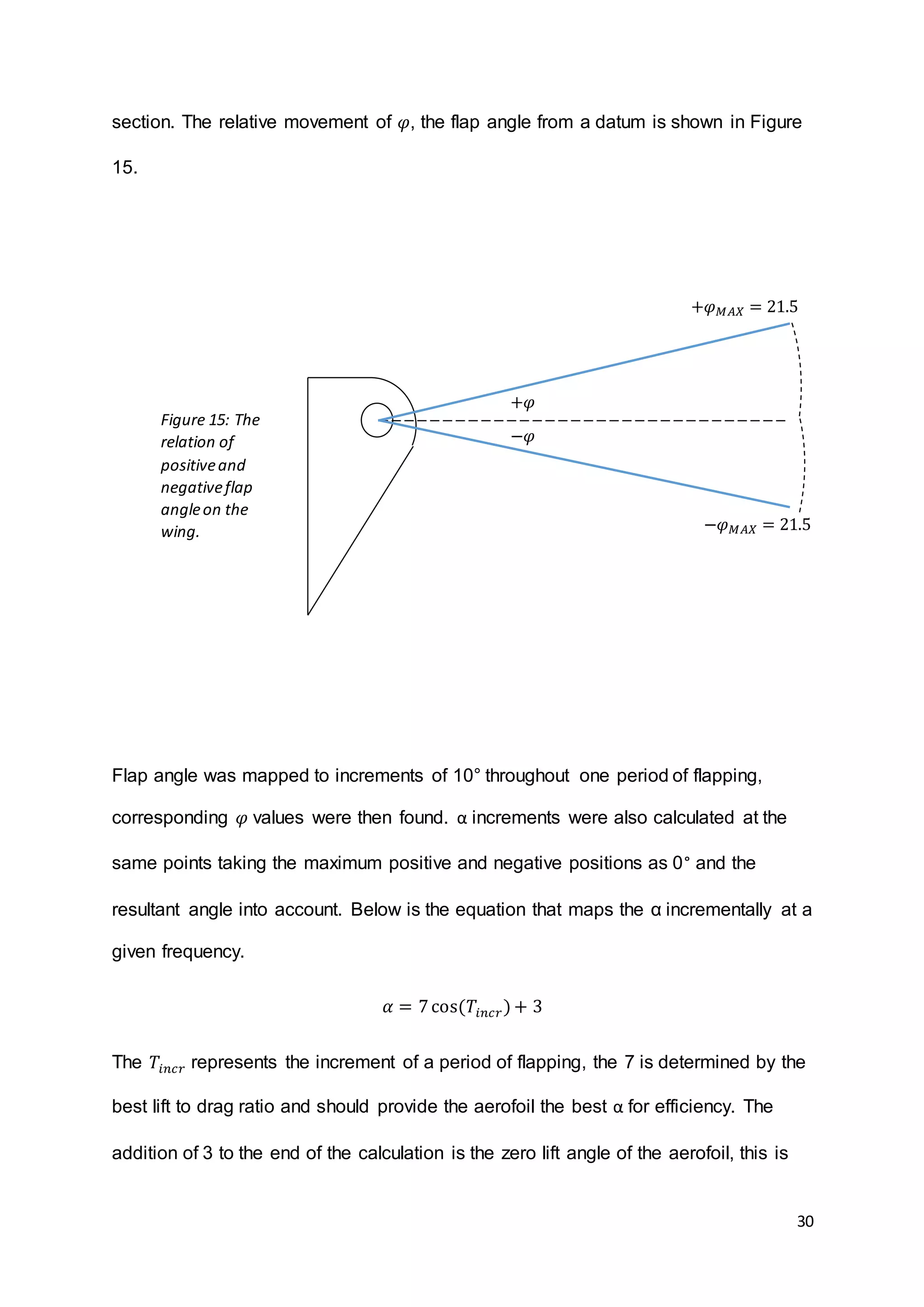
6.1.4. Equations Of Wing Flapping Motion
Having calculated some important elements of flow over the wing, it was also
necessary to determine and plot further characteristics. Using work done by Whitney
and Wood (2011) [22], the relationship between flap angle and alpha through one
period of flapping was calculated for various cases. Particularly the relationship
between flap angle and alpha would be useful as this would need to be recreated in
the control of the flapping motor and the servos for wing twist. The damping force
would also be important as if this was too great, the mechanism and motor would not
be able to withstand and overcome it to drive the wings. Flapping angle when
considered in the context of this study, is the angle of displacement of the wing from
the central datum of its range of movement.
Predominantly used were the equations derived in Whitney and Wood’s conceptual
model for instantaneous lift and damping force. Plots were also created for the
calculated change in flap angle, found by taking the 𝑉𝐶𝐺 𝑀 𝐴𝑋
discussed in the previous](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-29-2048.jpg)
![57
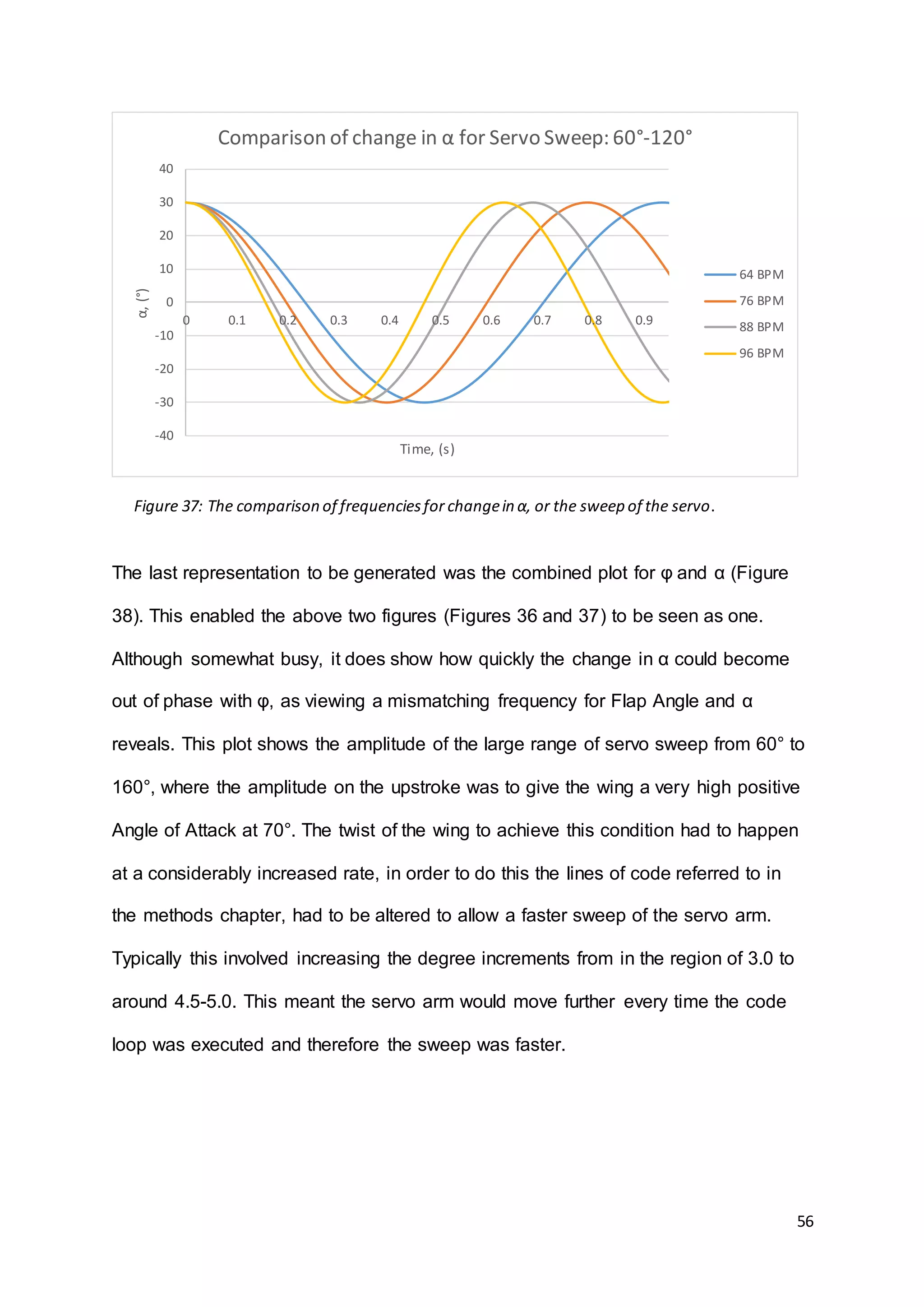
7.1.2. Component Flow Analysis
Applying the basic trigonometry for blade element theory, it was possible to predict
the effective angle of the flow felt by the wing [27]. Presented here in the results is
simply this resultant angle. It was found that as the free stream flow increased, the
angle of the resultant becomes increasingly smaller as can be seen in Figure 39.
These results prove the theory that in ‘zero’ velocity conditions, the test rig high
Angle of Attack on the upstroke would be important, especially at higher frequency.
Due to the low velocity which can be seen as the 1m/s line in Figure 39, we can see
the movement of the wing creates a large angle between the datum for the
freestream and the effective flow compared to faster flight speeds. This result would
also suggest that the test rig might benefit from further studies being carried out in a
wind tunnel, or some other form of freestream flow if future studies were to be made.
-40
-20
0
20
40
60
80
0 0.2 0.4 0.6 0.8 1
Angle(°)
Time, s
Relation between andφ and α for varying frequency (60-160)
64 BPM (Flap angle)
64 BPM (Alpha)
76 BPM (Flap angle)
76 BPM (Alpha)
88 BPM (Flap Angle)
88 BPM (Alpha)
96 BPM (Flap Angle)
96 BPM (Alpha)
Figure 38: A combined plot of φ and α fora rangeof -30° to +70° of wing twist.](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-57-2048.jpg)
![58
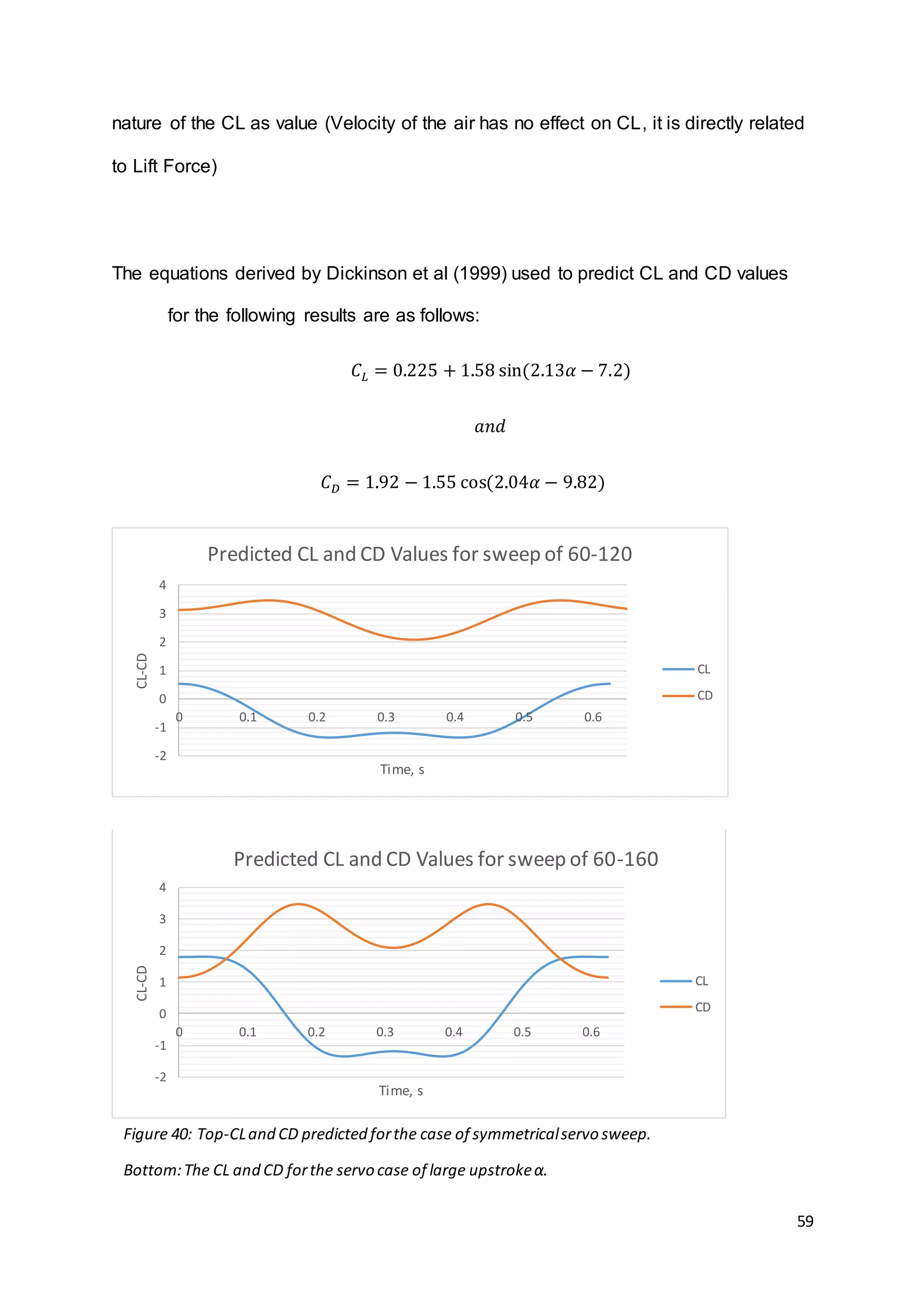
7.1.3. Lift Predictions Using Calculated CL Values
Using the method outlined by Sane and Dickinson (2001) [2] for their experimental
results, the same approach was taken with the calculated theoretical values obtained
for φ and α. This involved using equations derived by Dickinson et al (1999) [23] for
the approximation of CL and CD in flapping wings. Using this method, a separate
estimate of lifting force could be obtained to those found in XFLR5. Both approaches
would have their short comings, however both would provide results for comparison
to test results achieved. Figure 40 details the values found for both CL and CD for
both cases of the symmetrical ±30° α wing sweep, and the case of the wing having a
high α on the upstroke. These values would remain constant for any frequency (Also
the timescale plotted) over one period of the wings sinusoidal motion, due to the
0
10
20
30
40
50
60
5 15 25 35 45 55 65 75 85
Degrees°
Beats per Minute BPM
Beats per minute vs Resultant componentof flow over
wing.
@ 1 m/s
@ 2 m/s
@ 3 m/s
@ 4 m/s
@ 5 m/s
@ 6 m/s
@ 7 m/s
@ 8 m/s
@ 9 m/s
@ 10 m/s
Figure 39: The plotof theresultantflow anglestudy.Here theresultantα is shown on the
y axisagainstthebeatsper minute frequency of thewingsforvarying speedsof
freestreamflow.](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-58-2048.jpg)
![65
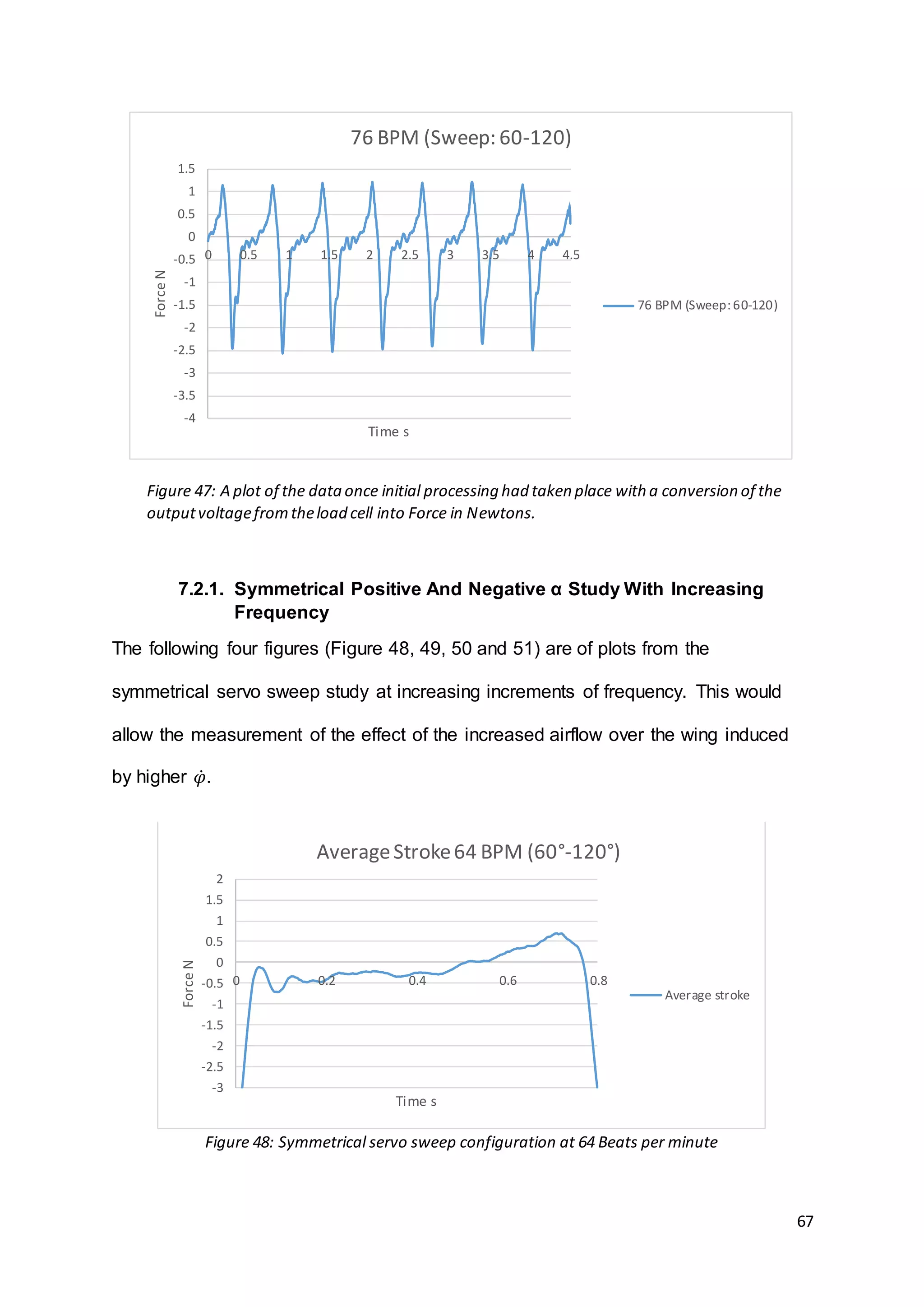
7.2. ExperimentalResults
The results obtained from the load cell on the test rig were the product of a snapshot
taken from the oscilloscope screen. This meant that the results initially covered a
series of flap cycles and still contained some noise, even though capacitors had
been added to the circuit across the output leads to quieten the signal. An example
of a screen shot from the oscilloscope can be seen in Figure 46 with Figure 47 being
a plot of the force obtained after initial averaging and manipulation of the raw
numerical data. It would not be useful to analyse the results of multiple wing flaps as
some inconsistency could be found, it would also be hard to compare the large
amount of data generated over two cases. Because of this it was decided that the
best approach was that of Sane and Dickinson (2001) [2], where the average of
multiple wing strokes was taken to provide data for just a single wingbeat. This would
lead to any anomalies being lost into a data set for a single wing beat of averages.
Time φ α CL
Force @1
m/s (N)
Force
@2 m/s
(N)
Force
3m/s
(N)
0 0 30 1.69 0.144918 0.57967 1.304258
0.0694 13.81 22.98 1.4623 0.125392 0.501569 1.12853
0.104 19.26 15 1.2976 0.111269 0.445077 1.001423
0.16 21.17 0 0.3493 0.029952 0.11981 0.269572
0.226 16.5 -19.28 -0.77 -0.06603 -0.26411 -0.59425
0.3125 0 -30 -0.834 -0.07152 -0.28606 -0.64364
0.43 -21.17 -10.26 -0.0014 -0.00012 -0.00048 -0.00108
0.469 -21.5 0 0.3483 0.029867 0.119467 0.268801
0.556 -13.82 23 1.4608 0.125264 0.501054 1.127372
0.59 -10.5 28.19 1.6763 0.143743 0.574971 1.293685
Figure 45: The tableof numericalvaluesshowing thepredicted forces forfigure10. Valuesof 1.3N at
peaklifting forcewould be good to obtain experimentally and show thatthedesign of thetest rig could
be feasible.](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-65-2048.jpg)
![69
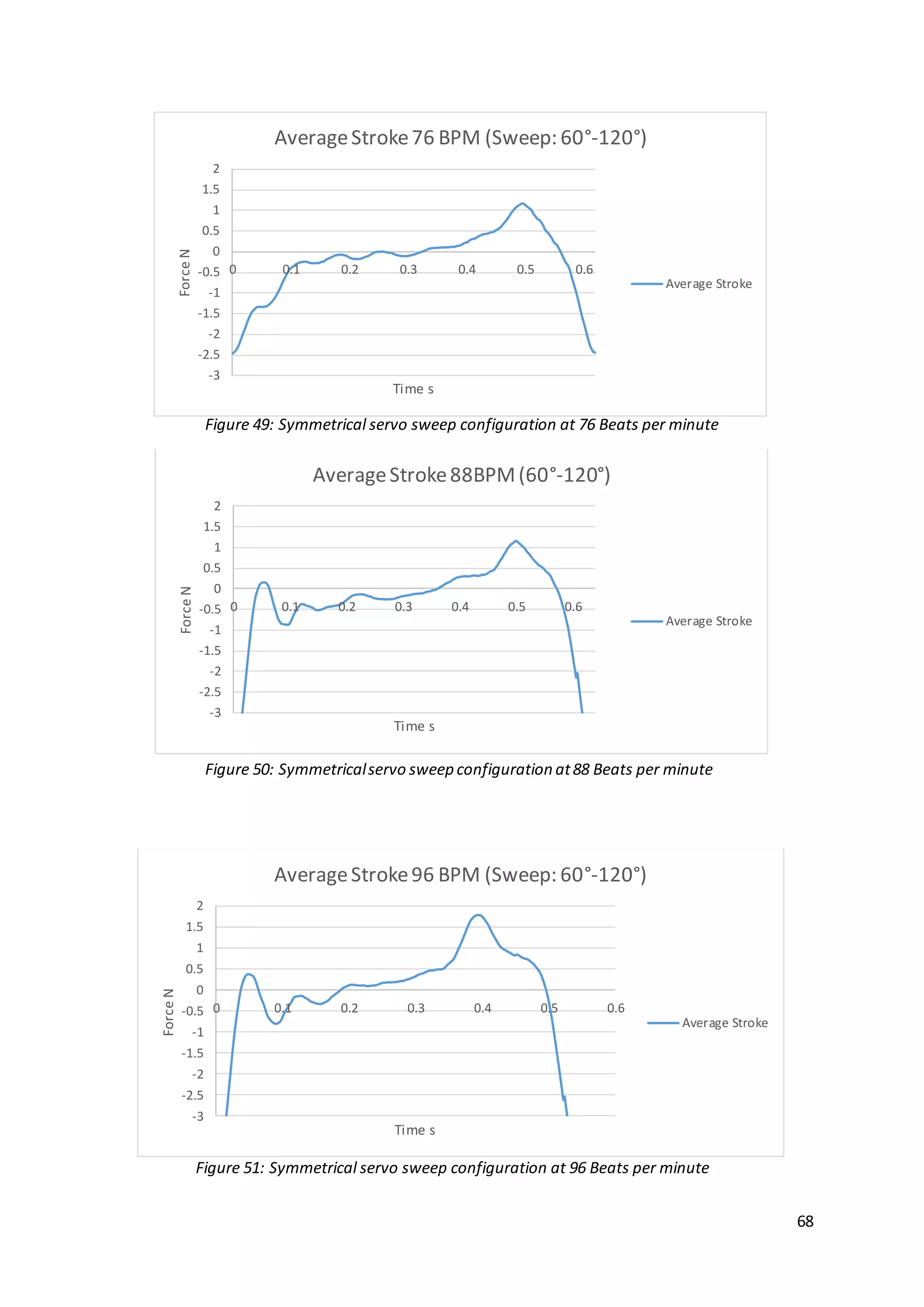
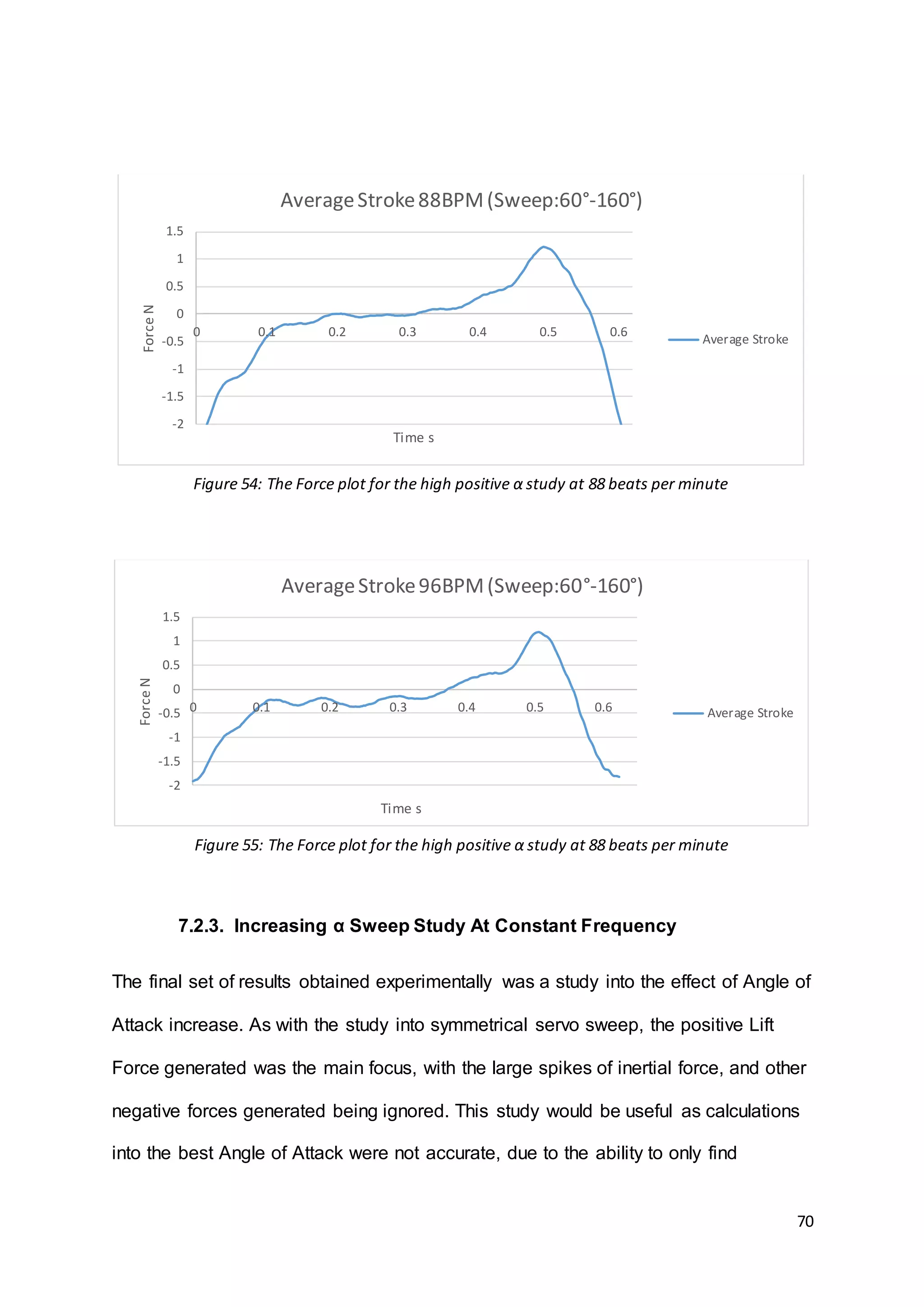
7.2.2. High Positive α Study With Increasing Frequency
The next study made was again into the increasing frequency of flapping, but with
the variation of a much higher Angle of Attack on the upstroke. As mentioned by
Anderson (2001), the rapid pitch up at the end of the stroke allows higher CL to be
achieved towards the end of the lift stroke [20]. The higher α in the upstroke should
also produce less negative force due to the reduced surface area perpendicular to
the velocity of the wings centre of mass. The results for this study are plotted in
Figures 52, 53, 54 and 55. All increments in the increase in frequency have been
kept the same as for the symmetrical servo sweep study.
-2
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.2 0.4 0.6 0.8
ForceN
Time s
AverageStroke64 BPM (Sweep:60°-160°)
Average Stroke
-2
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.1 0.2 0.3 0.4 0.5 0.6
ForceN
Time s
AverageStroke76 BPM (Sweep:60°-160°)
Average Stroke
Figure 52: The Force plot for the high positive α study at 64 beats per minute
Figure 53: The Force plot for the high positive α study at 76 beats per minute](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-69-2048.jpg)
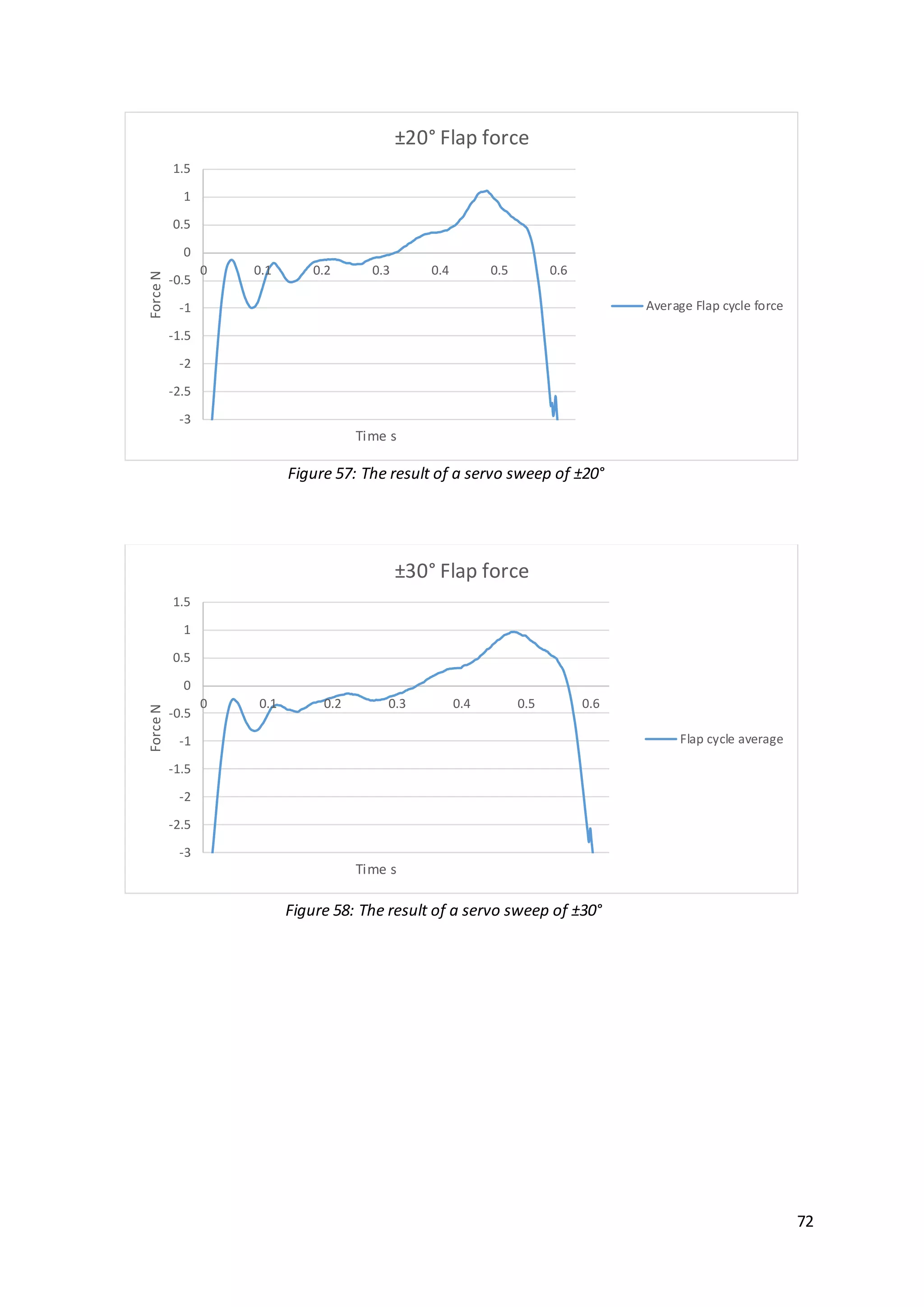
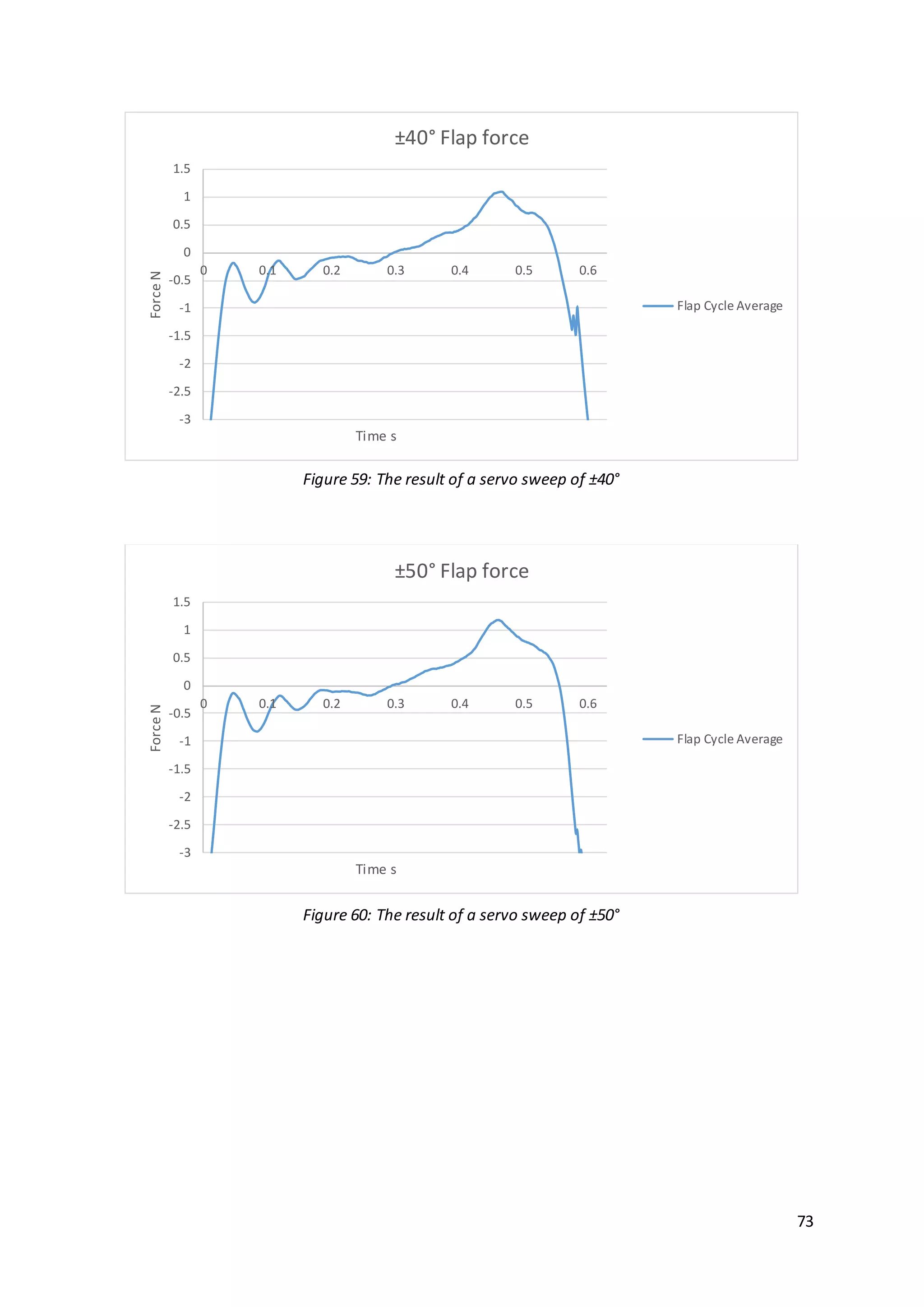
![71
solutions to a static wing in two dimensional flow. The case of flapping would present
a far more difficult problem and for the purposes of this project would be better
analysed experimentally. The symmetrical servo sweep analysed, ranged from ±10°
through to ±50° in increments of 10°. These results are shown in Figure 56 to 60.
The same procedure was used as for the previous results by applying Sane and
Dickinson’s method [2] of averaging all strokes measured into a single wing beat.
This would keep all results obtained consistent.
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.1 0.2 0.3 0.4 0.5 0.6
ForceN
Time s
±10° Flap force
Flap cycle average
Figure 56: The result of a servo sweep of ±10°](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-71-2048.jpg)
![74
8. Chapter 3: Analysis
The results for the numerical modelling and the experimental studies allowed a
comparison between the theoretical calculations and reality. Not only would these
comparisons provide answers, but the differences between the experimental results
and the theory proved to be just as revealing as the similarities as to the challenges
of flapping wing flight. As well as considerations that would need to be made or
addressed in the design of an MAV. These answers or new challenges would not
only come from the results but also from the design and operation of the test rig,
revealing design faults that may have already been addressed by the designers of
previous successful projects such as the Festo Smartbird[3].
8.1. The Design
The selection of wood as the predominant material was chosen because of the
speed in producing parts by laser cutting. However this added unnecessary weight to
the test rig. The 3mm and 5mm thick plywood used is the same as that used in
remote control model aeroplanes. However these thicknesses were more than
required as the structure proved plenty strong enough. As to the loads induced on
the wood, the design played well to the material strengths, adding to the case for the
potential of thinner wood. Alternatively, the ribs could have been made from much
lighter balsa wood due to the loads being quite low and the structure more than
adequate.
Looking at the results of experimental testing, the most noticeable characteristic is
the large peak of negative force. This is created by the large inertial forces produced
by the wings, as their momentum is rapidly damped at the end of each downstroke.
This is amplified by the motion of the mechanism quickly lifting the wings for the](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-74-2048.jpg)
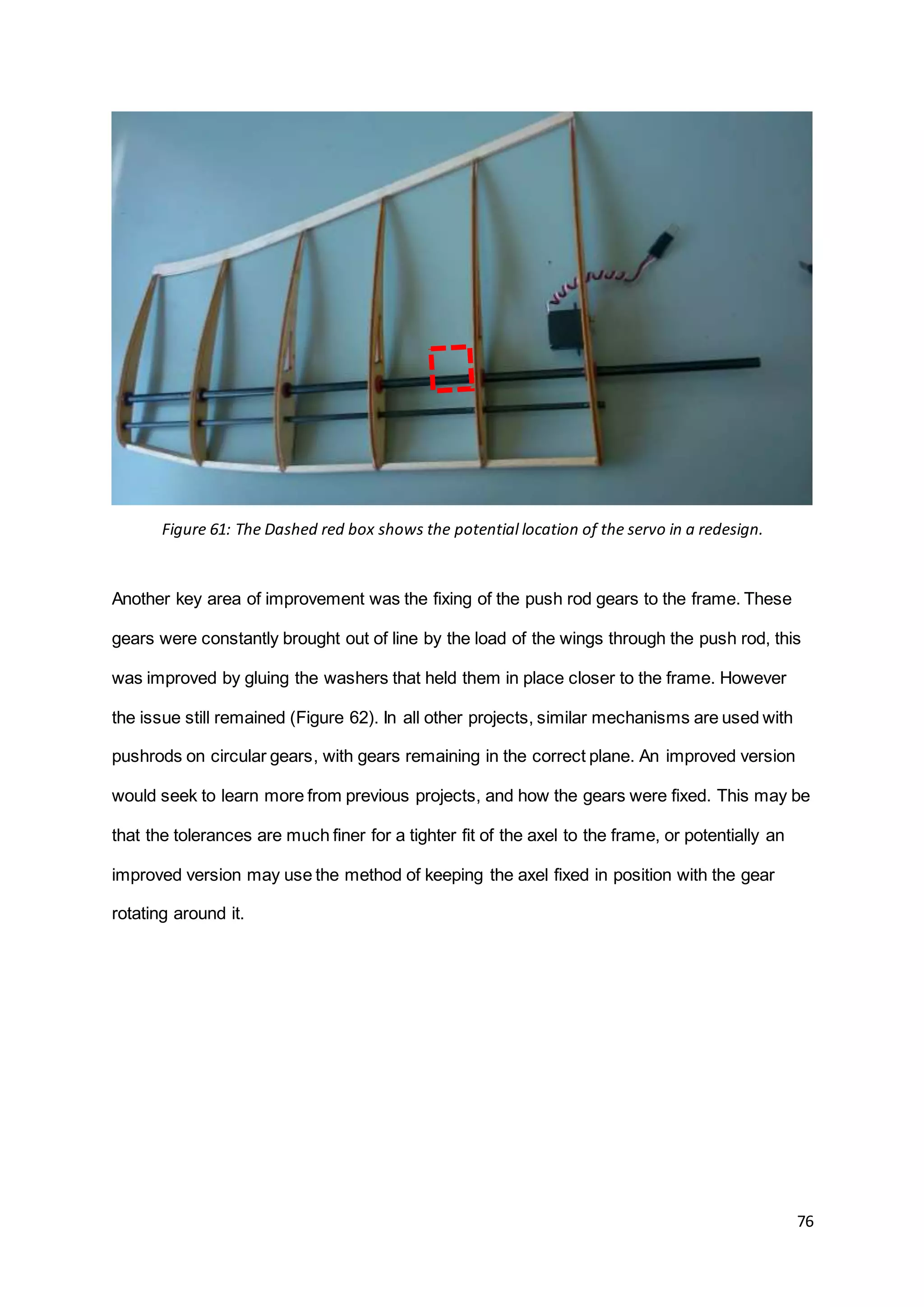
![78
With further work on the project, the addition of sensors would be the most practical
and useful modification. A sensor could easily be positioned on the frame to register
the movement of one of the gears or the wing spar. This could be used as a trigger
to activate a twist of the servo with regard to its current position. This addition would
alleviate the need for calibration and the correct starting position of the test rig,
allowing the parameters affecting beats per minute to be changed exclusively with
the speed of the motor.
8.3. Comparisons Between The Lift Force Calculated And Lift
Force Determined Experimentally.
Due to the nature of the numerical analysis, it was possible to use two different
methods for calculating the Lift Force produced by the wings. One method would
apply the calculation of sinusoidal functions of φ and α as by Whitney and Wood
(2012) [22], to then apply equations for the approximation of CL and CD as by
Dickinson et al (1999) [23] to finally produce a force prediction from the lift equation.
The second method for theoretically determining the lift would again use calculation
of φ and α to then run an analysis on increments of the flap cycle in XFLR5 to find a
CL, this would then as before, be used in the lift equation. Both methods would have
their advantages and disadvantages but when comparing the two methods over a
single case with identical values of φ, α, 𝑉∞ and ρ, there is a strong correlation
between the results obtained. A comparison is shown in Figure 63 with a comparison
between the methods for a case of 96BPM, an Angle of Attack sweep of -30° to
+70°, and a freestream velocity of 3m/s.](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-78-2048.jpg)
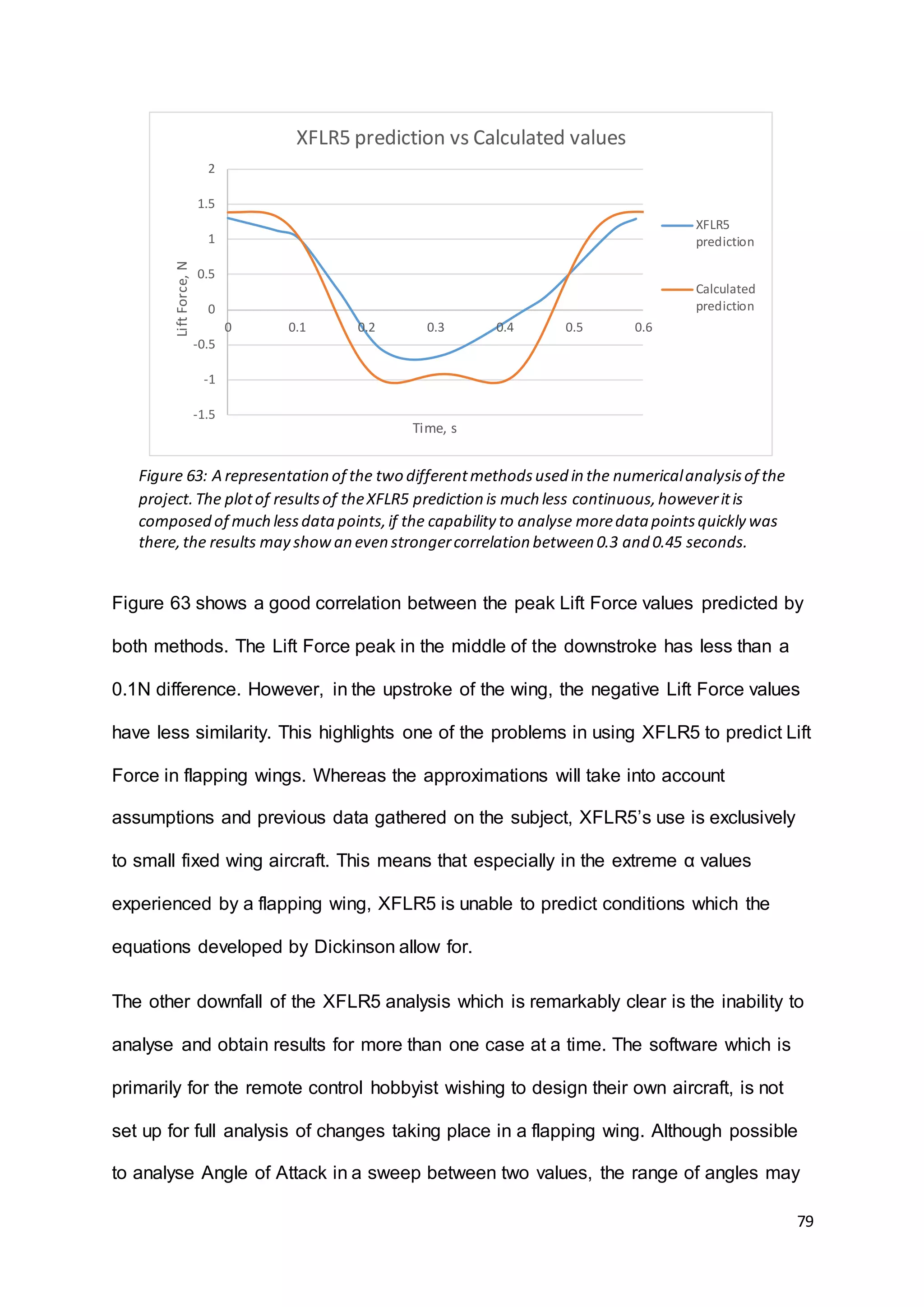
![80
only span across a maximum of 40° at a time. The software is also able to do the
same with freestream velocity. However in the example of a flapping wing vehicle,
the software cannot sweep through more than one set of parameters at a time, and
in the case of wing dihedral which is constantly changing in flapping flight, this must
be altered manually every time. To this end, the plot of the XFLR5 results is
composed of only 10 data points, with plots for the calculated values containing
some 37 data points. This becomes obvious when viewing them side by side, as the
plot for the XFLR5 values is far less continuous in profile due to a far less regular
spacing of values. This is not to say however, that an XFLR5 analysis with more data
points could provide a much more coherent analysis.
Figure 64 shows the predicted increase in the freestream flow over its value due to
the added component of the wings velocity in the downstroke. From the results of the
application of blade element theory, which treats the wing as a propeller blade
moving at a constant velocity perpendicular to an oncoming flow, it can be seen that
the increase becomes less with increasing horizontal airspeed. An airspeed of 1m/s
0
0.5
1
1.5
2
2.5
3
3.5
0 20 40 60 80 100
Velocity,m/s
Frequency BPM
Low Speed resultantvelocity induced by flapping
@ 1 m/s
@ 2 m/s
@ 3 m/s
Figure 64: The predictions for low velocity resultant flow over the wings using Blade element
theory [27].](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-80-2048.jpg)
![88
find CL and then Lift Force which could be plotted alongside that obtained
experimentally for comparison. The Lift Force obtained from the load cell was
averaged over six wing beats in order to give an average set of values for a single
flap cycle. This approach to the theoretical calculations from the work of both
Whitney, J.P. (2012) [22] and Dickinson, M.H. (1999) [23] proved the most
straightforward way of processing the large amount of data generated in testing. This
coupled with the method of presenting experimental results by Sane, S.P. (2001) [2]
provided the best way of presenting both the predicted and actual values for a
specific combination of the frequency and amplitude of α applied to the test rig
wings.
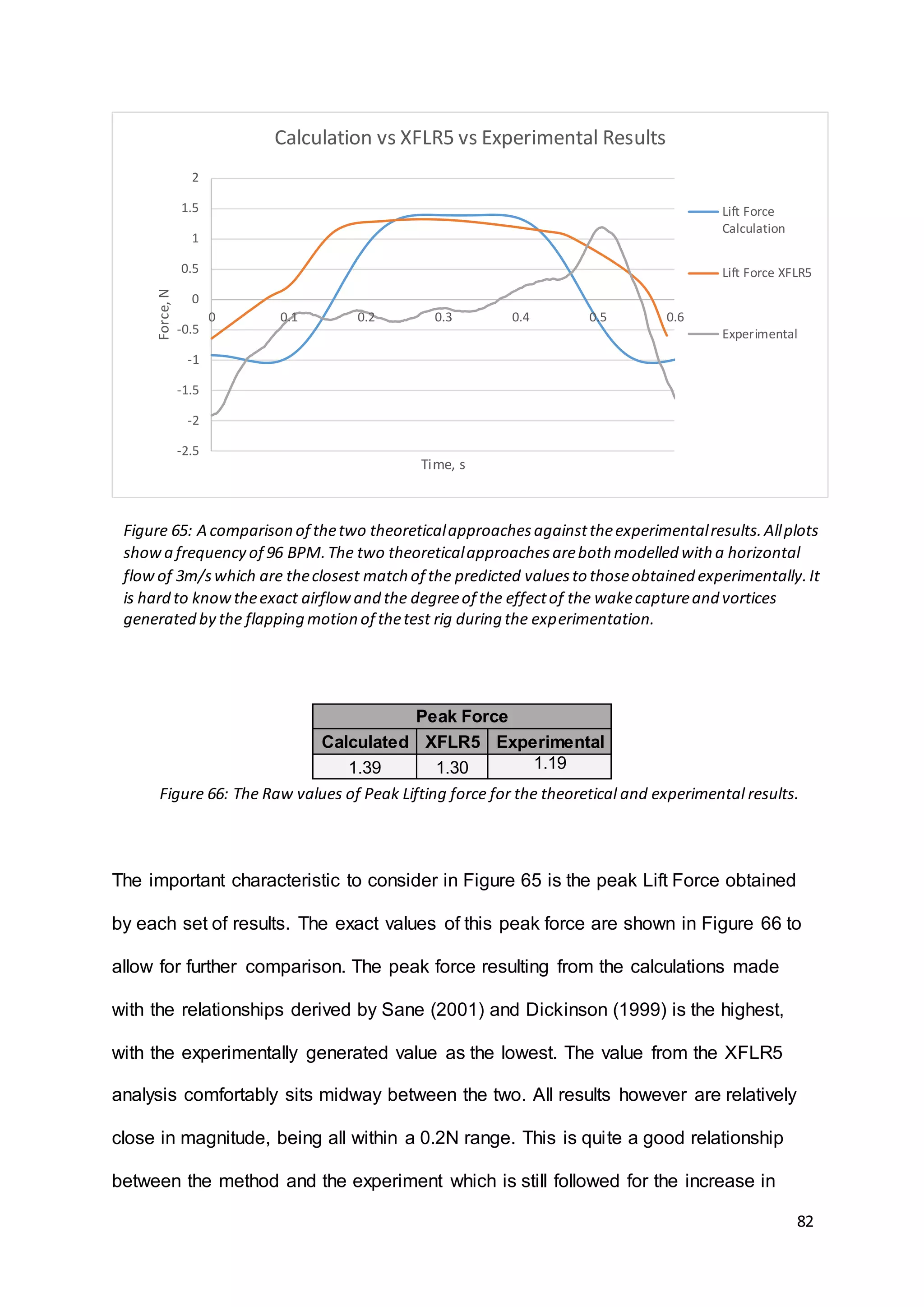
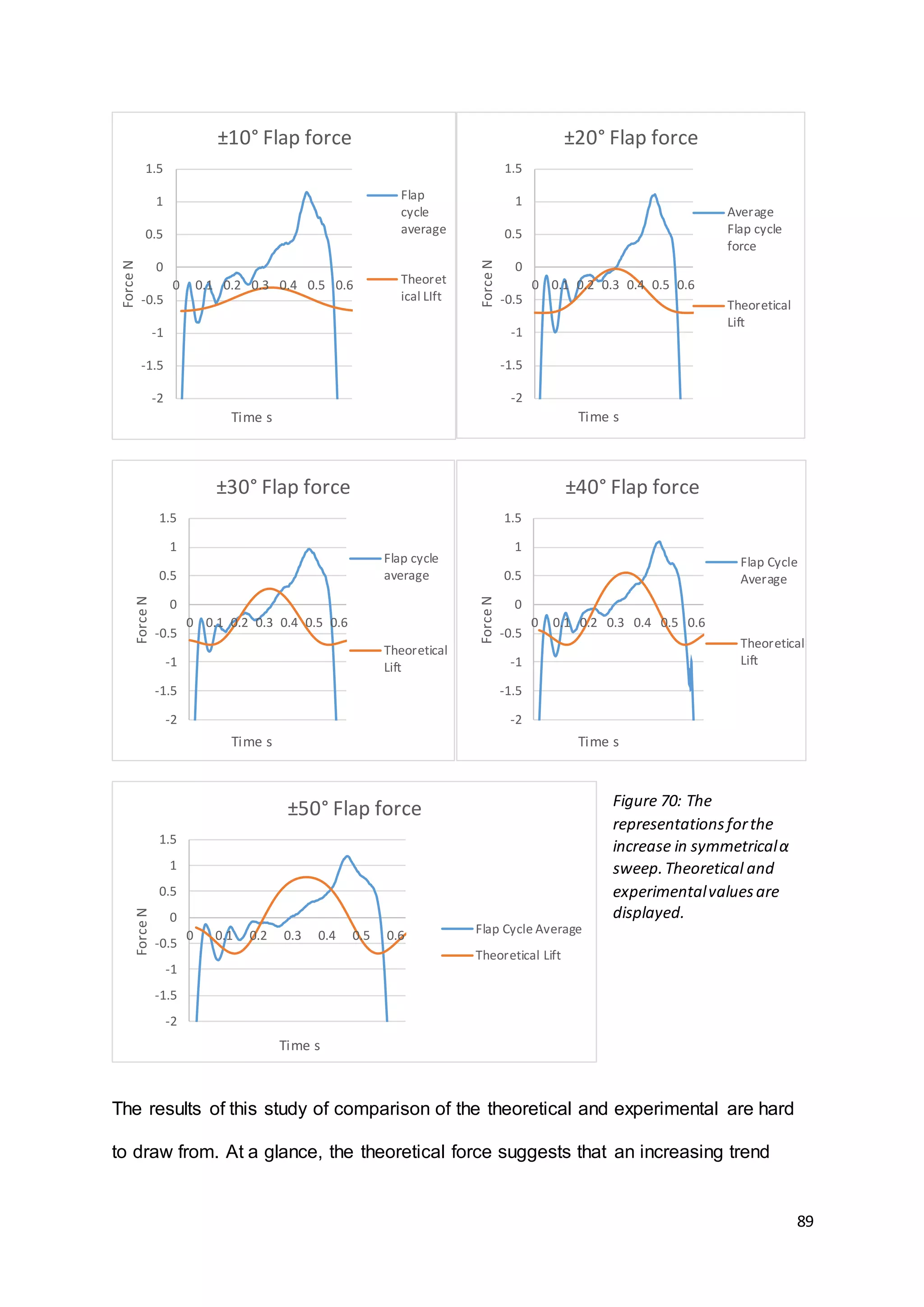
Figure 70 shows the plots of theoretical and experimental results for the testing of
increasing Angle of Attack. As much as possible, parameters were kept constant
across all testing with the same frequency, same conditions and the servos moving
the wings between positive and negative α at a uniform speed. Again as in previous
discussion over the theoretical results, the velocity applied in the equation for Lift
Force is not 0m/s which would be the true horizontal component of velocity on the
test rig wings. The freestream speed was again treated as 2m/s with the increase
induced by the wings flapping at 88 beats per minute. This allowed the aerodynamic
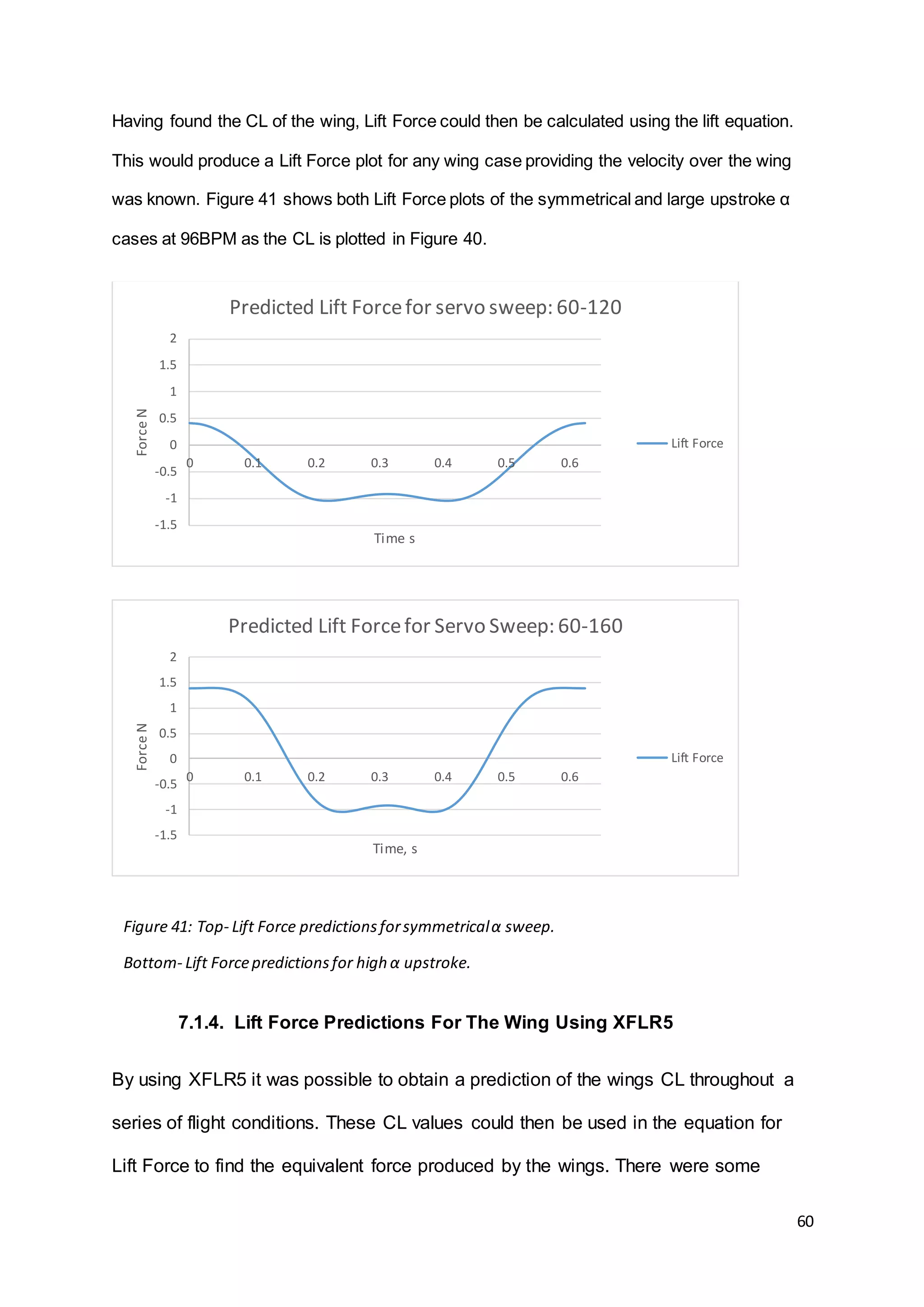
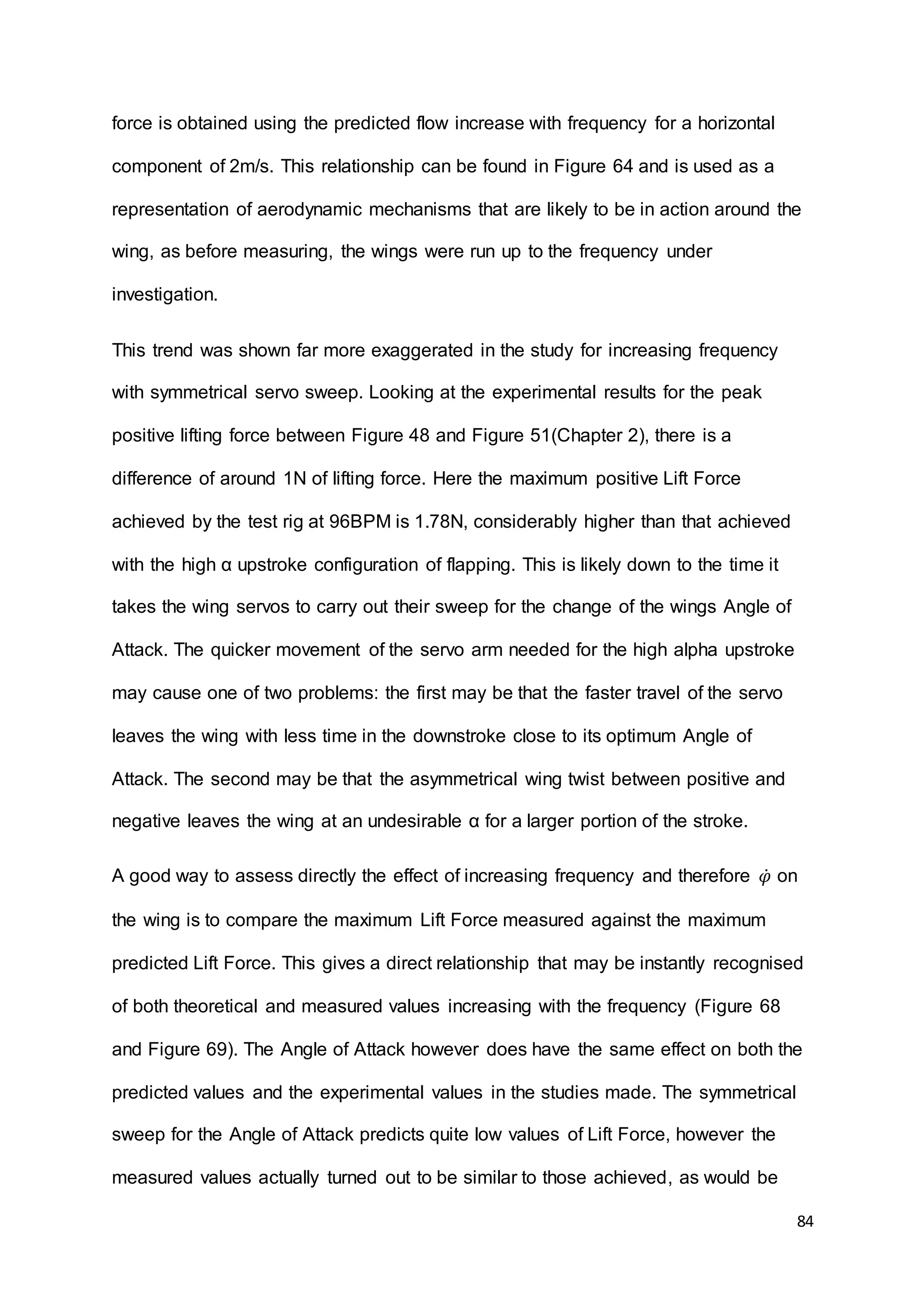
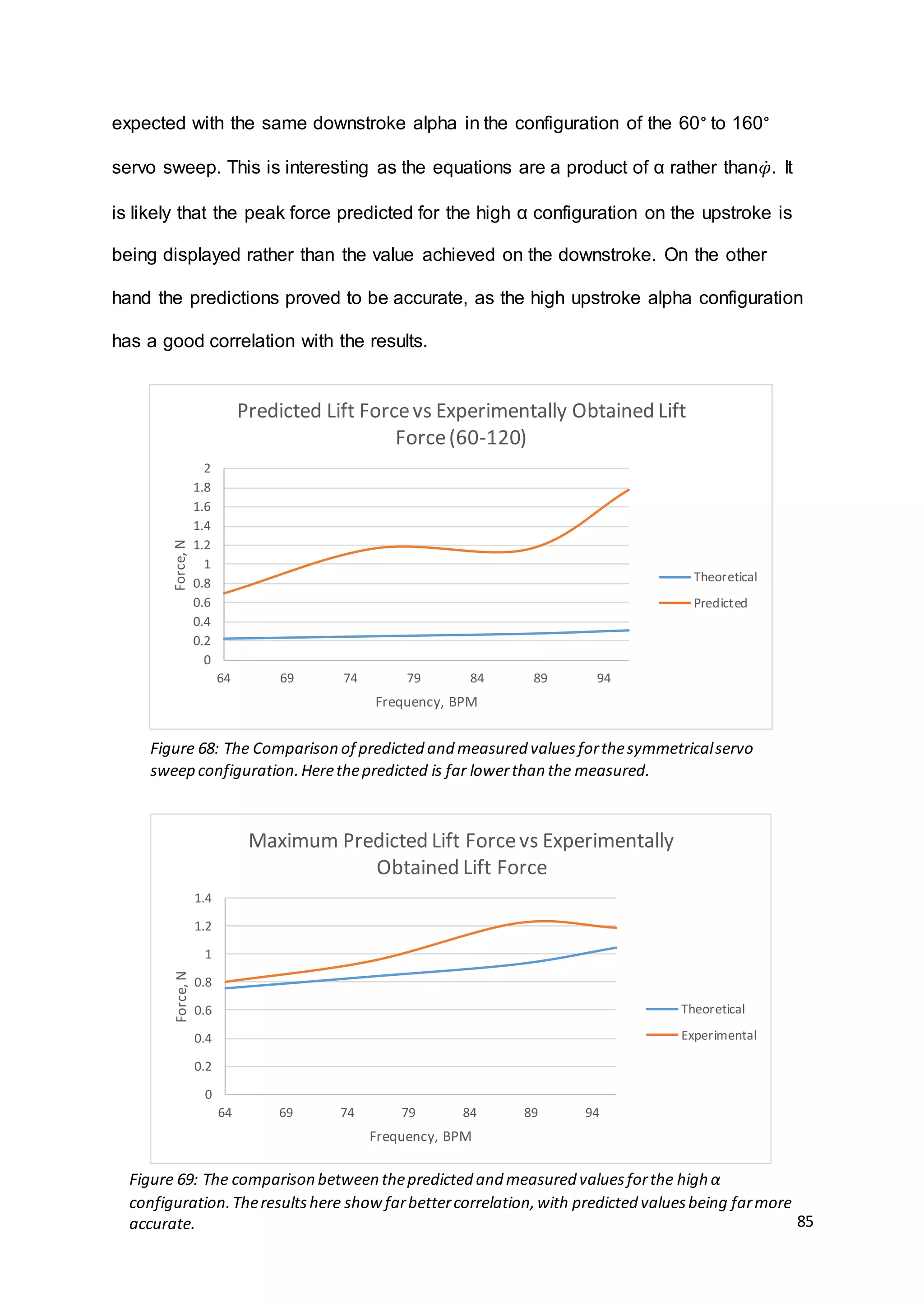
mechanisms and the motion of the wings to be accounted for in force calculations.](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-88-2048.jpg)
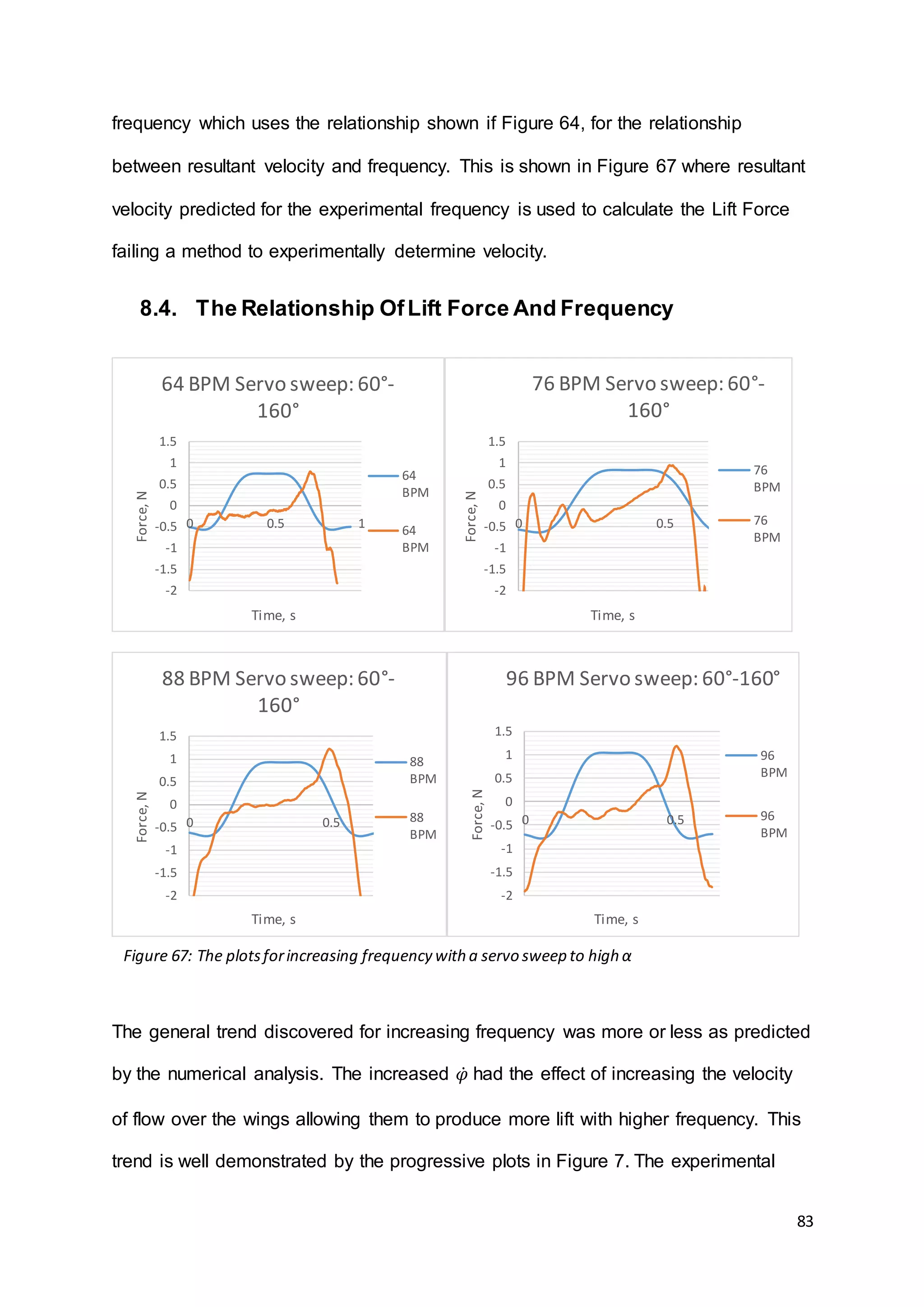
![93
stroke with higher frequency. It goes without saying that with higher frequency, the
force generated is applied more regularly per minute than the lesser force at a lower
amount of beats per minute. In the design of a flapping wing air vehicle, possibly the
most essential factor in its success would be to match the frequency with the
characteristics of the wings to ensure enough lift for the required performance. Angle
of Attack of the wings in the stroke, although important to some degree is thought
would be more essential in generating thrust which was not a subject of this project.
In further work there are many more alterations and measurements that would be of
use to the development of flapping wing flight. However as a result of this project and
specifically the work done in testing the concept of the flapping wings, with internal
servos providing wing twist, the main additional investigation would be as follows:
Firstly the investigations carried out in the results of this project, would be carried out
in some form of airflow, or the test rig attached to a rotating arm of constant speed.
This would allow forces to be measured outside of the zero velocity condition and
would allow the exact parameters used in the theoretical calculations to be
controlled. A second study to be carried out would be into the propulsive force
generated by the wings and the effect of the Angle of Attack and frequency on the
thrust the wings generate. For work such as this, it may also be of interest to add
some form of flexible trailing edge towards the tip of the wing, which could enhance
the thrust created significantly. Lastly the alteration off the design to the two panelled
wing configuration of the Festo Smartbird [3] would allow for a comparison of inertial
forces. The two panelled wing by its nature should provide a better conservation of
momentum in the flapping wings, due to the panels flapping out of phase. Forces at
the end of the down stroke would likely be far less in amplitude, with the entire flap
cycle being much smoother without the rapid change in direction of the wings seen](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-93-2048.jpg)

![95
10. References
1. Andrew M. Mountcastle, Stacey A. Combes (2013) 'Wing flexibility enhances load-
lifting capacity in bumblebees', Proceedings B, 280(1759), pp. 1-2 [Online]. Available
at:http://rspb.royalsocietypublishing.org/content/280/1759/20130531 (Accessed:
15/09/2015)
2. Sane, S.P.,Dickinson, M.H. (2001) 'The Control Of Flight Force By A Flapping Wing:
Lift And Drag Production', The Journal Of Experimental Biology, 204(JEB3400), pp.
2607-2626.
3. Festo (2011) Smartbird- Inspired by nature. [Online]. Available
at:http://www.festo.com/PDF_Flip/corp/smartbird_en/index.htm#/58/ (Accessed: 3rd
June 2015).
4. Festo (2013) BionicOpter - Inspired by Dragonfly Flight, Available
at:http://www.festo.com/net/SupportPortal/Files/248133/Festo_BionicOpter_en.pdf(A
ccessed: 3rd June 2015).
5. Festo (2015) eMotionButterflies - Ultralight flying objects with collective
behaviour,Available
at:http://www.festo.com/net/SupportPortal/Files/367913/Festo_eMotionButterflies_en.
pdf(Accessed: 3rd June 2015).
6. Lauri Poldre (2011) An interview with the engineer behind the man-made
SmartBird.,Available at: http://blog.grabcad.com/blog/2011/06/14/festo-
smartbird/ (Accessed: 4th June 2015).
7. Image Available from: http://www.festo.com/cms/en_corp/13165.htm
8. Nico Nijenhuis (2014) Clear Flight Solutions, Available
at:http://clearflightsolutions.com/ (Accessed: 4th June 2015).
9. Colin Jeffrey (2014) Robotic raptors look and fly like the real thing, Available
at:http://www.gizmag.com/flying-robot-raptor-birds-deter-nuisance-
flocks/33563/(Accessed: 4th June 2015).
10. Kyle Vanhemert (2014) Realistic Robo-Hawks Designed to Fly Around and Terrorize
Real Birds, Available at: http://www.wired.com/2014/08/realistic-robo-hawks-
designed-to-fly-around-and-terrorize-real-birds/ (Accessed: 4th June 2015).
11. Withers, P. C. An aerodynamic analysis of birds wings as fixed aerofoils. J. Exp.
Biol., 1981, 90, 143–162
12. Liu, T. , Kuykendoll, K. , Rhew, R., and Jones, S. Avian wing geometry and
kinematics. AIAA J., 2006, 44, 954–963.
13. BROWN, R.E., FEDDE, M.R. (1993) 'Airflow Sensors in the avian wing', Journal of
Experimental Biology, 179(66506), pp. 13-30.
14. Carruthers A.C.∗, Walker S.M., Thomas A.L.R., Taylor G.K. (2009) 'Aerodynamics of
aerofoil sections measured on a free-flying bird', Part G: J. Aerospace
Engineering,224(AERO737), pp. 855-864.
15. Bilo, D. Flugbiophysik von Kleinvögeln. I. Kinematik und Aerodynamik des
Flügelabschlages beim Haussperling (Passer domesticus L.). Z. vergl. Physiol.,
1971, 71, 382–454
16. Brill, C., Mayer-Kunz, D. P., and Nachtigall,W.Wing pro- file data of a free-gliding
bird. Naturwissenschaften, 1989, 76, 39–40.
17. Heather Howard (2014) Falconsong Studios, Available
at:http://www.falconsongstudios.com/?page_id=844 (Accessed: 9th June 2015).
18. Andrew A. Biewener (2011) 'Muscle function in avian flight: achieving power and
control', Integration of muscle function for producing and controlling
movement,366(1570), pp. 3-15 [Online]. Available
at:http://rstb.royalsocietypublishing.org/content/366/1570/1496 (Accessed: 9th June
2015).
19. Image available from: http://www.birdsnways.com/wisdom/ww19eii.htm](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-95-2048.jpg)
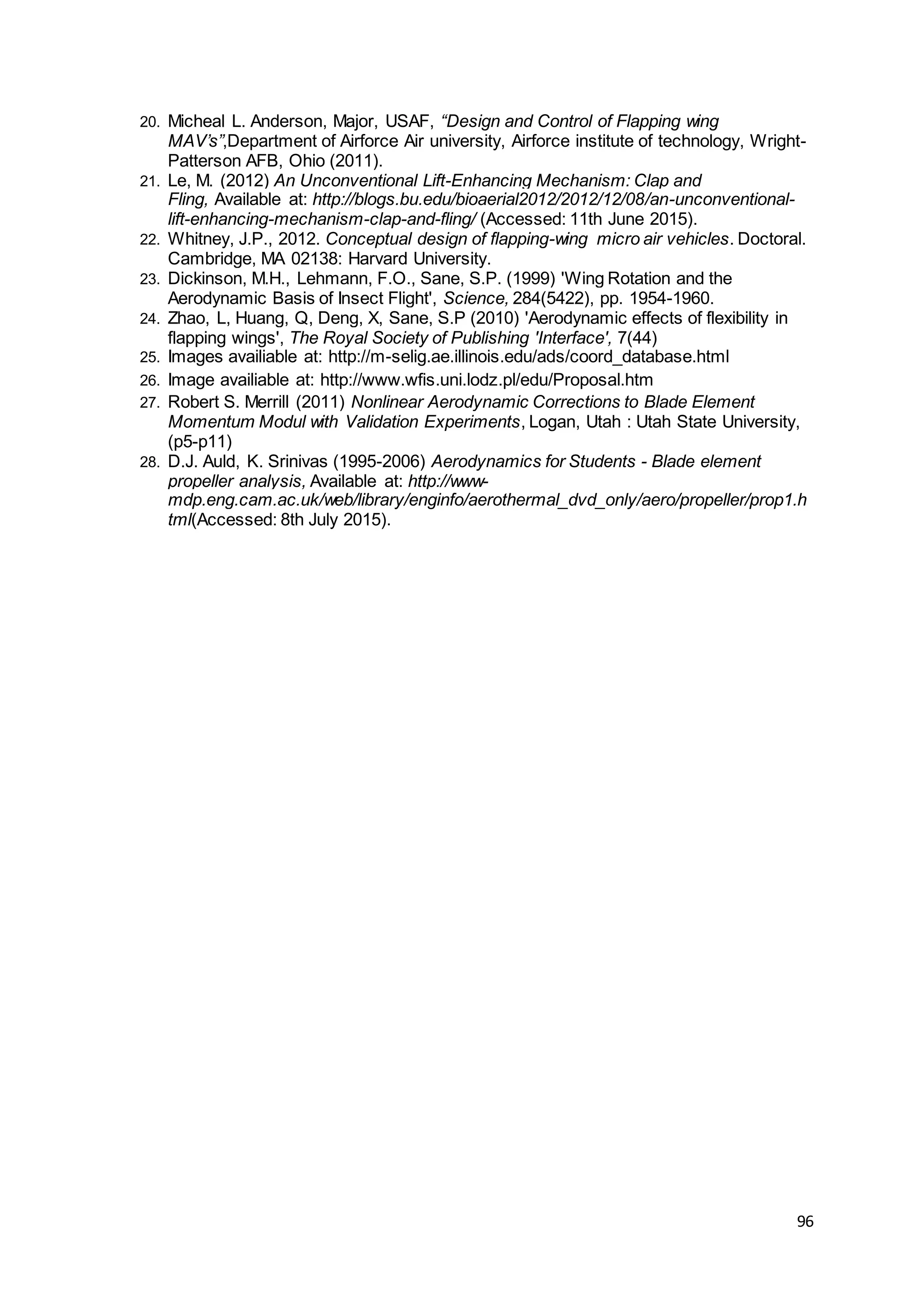
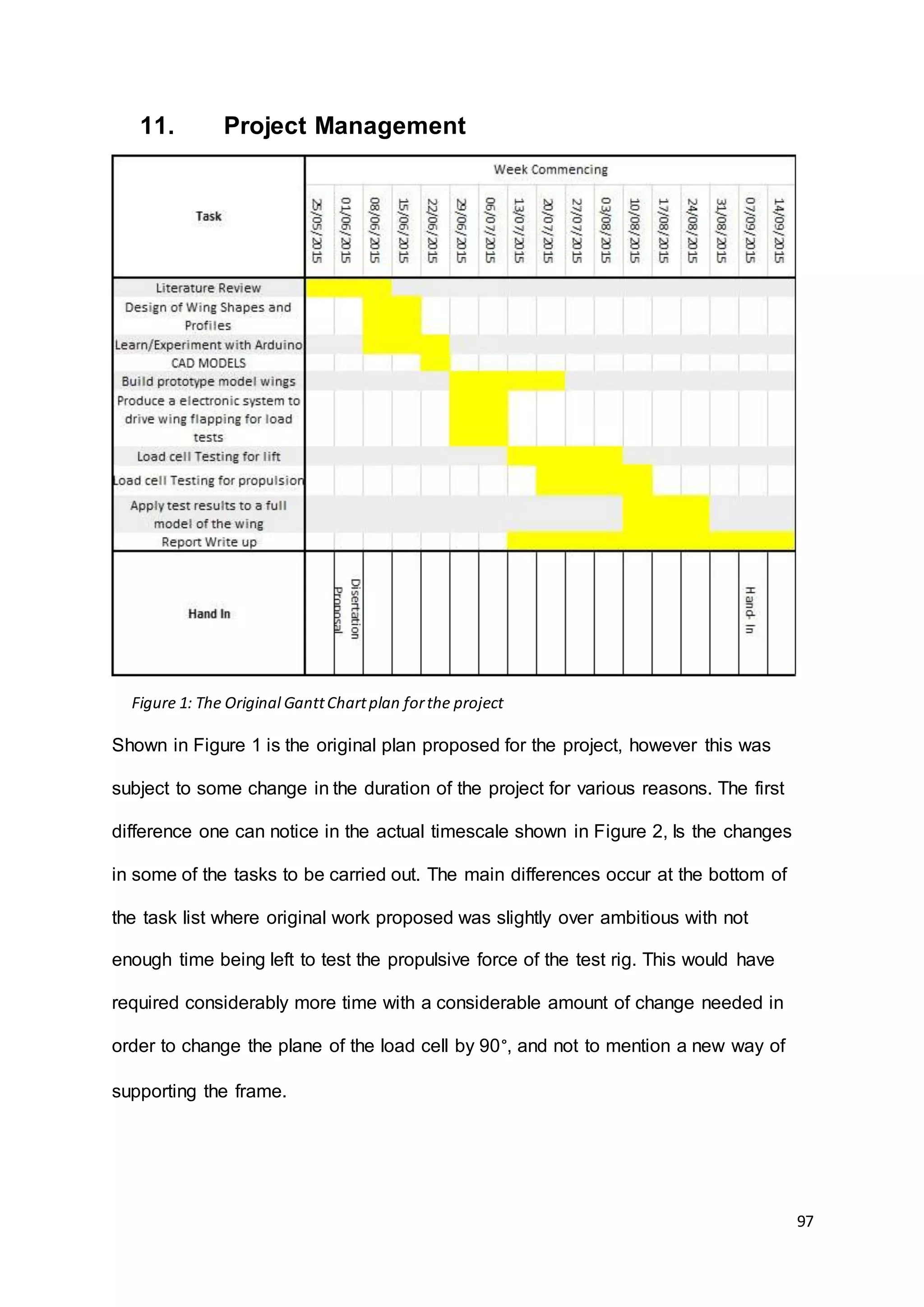
![99
12. Appendix: Dissertation Proposal: Bio-inspired
Flying Machines
1. Introduction and Background to the Project
There is currently a fast increasing interest in bird and insect flight and how this
could be interpreted into a mechanical flying machine, more specifically in the form
of a UAV (unmanned air vehicle). Potential for such vehicles has been identified in a
number of sectors, most notably in the military market. With development of stealth
technology and radar being in a constant battle of development, a new form of
stealth is being considered, in the form of ‘bird or insect like’ vehicles. These would
be small and disguised to look as their counterparts in the natural world making them
very hard to detect visually and by radar. Lessons have already been learn for the
current generation of small UAV’s as birds and insects have naturally evolved to
operate in similar Reynolds number regimes [1].
Many attempts have been made to achieve flapping wing flight as it has been a
dream of man-kind for century’s to fly like a bird resulting in many ornithopter
attempts and to this day models are still being produced for hobbyists, some
powered by elastic bands, others powered by electric motors. However perhaps
the most significant step forward in bird like flight is the FESTO Smartbird, based
on a gull (Figure 1). This uses flapping with a servo to actively twist the wing
based on sensor readings for torsion of the wing, load on the motor and motor
position. Other vehicles have also been produced drawing inspiration from other
areas such as hummingbirds, dragonflies and other insects, however most of
these are much smaller and the end result is not as convincingly real.
Nonetheless, some of these have also provided major leaps forward in](https://image.slidesharecdn.com/8e899637-7cdd-4647-87b4-d35770687fda-160727153421/75/Dissertation-Final-Version-99-2048.jpg)


































![Proyectos de vida_dinamica[1][1]](https://cdn.slidesharecdn.com/ss_thumbnails/proyectosdevidadinamica11-140205211121-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)































