Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
TA
Uploaded by
Toshiaki Aoike
298 views
Serverless Meetup Japan Virtual #6
Serverless Meetup Japan Virtual #6 の登壇資料
Technology
◦
Read more
2
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 78
2
/ 78
3
/ 78
4
/ 78
5
/ 78
6
/ 78
7
/ 78
8
/ 78
9
/ 78
10
/ 78
11
/ 78
12
/ 78
13
/ 78
14
/ 78
15
/ 78
16
/ 78
17
/ 78
18
/ 78
19
/ 78
20
/ 78
21
/ 78
22
/ 78
23
/ 78
24
/ 78
25
/ 78
26
/ 78
27
/ 78
28
/ 78
29
/ 78
30
/ 78
31
/ 78
32
/ 78
33
/ 78
34
/ 78
35
/ 78
36
/ 78
37
/ 78
38
/ 78
39
/ 78
40
/ 78
41
/ 78
42
/ 78
43
/ 78
44
/ 78
45
/ 78
46
/ 78
47
/ 78
48
/ 78
49
/ 78
50
/ 78
51
/ 78
52
/ 78
53
/ 78
54
/ 78
55
/ 78
56
/ 78
57
/ 78
58
/ 78
59
/ 78
60
/ 78
61
/ 78
62
/ 78
63
/ 78
64
/ 78
65
/ 78
66
/ 78
67
/ 78
68
/ 78
69
/ 78
70
/ 78
71
/ 78
72
/ 78
73
/ 78
74
/ 78
75
/ 78
76
/ 78
77
/ 78
78
/ 78
More Related Content
PPTX
はじめてのAWS Lambda
by
Masaki Misawa
PDF
Java Clientで入門する Apache Kafka #jjug_ccc #ccc_e2
by
Yahoo!デベロッパーネットワーク
PDF
ヤフー発のメッセージキュー「Pulsar」のご紹介
by
Yahoo!デベロッパーネットワーク
PPTX
Kinesis Firehoseを使ってみた
by
Masaki Misawa
PPTX
ゲームエンジニアのためのデータベース設計
by
sairoutine
PDF
20150227 IPv6 Summit in FUKUI 2015 IPv6対応webサービスの作り方
by
v6app
PPTX
Jjug ccc
by
Tanaka Yuichi
PDF
20141023 IPv6 Summit in FUKUOKA 2014 IPv6対応Webサービスの作り方
by
v6app
はじめてのAWS Lambda
by
Masaki Misawa
Java Clientで入門する Apache Kafka #jjug_ccc #ccc_e2
by
Yahoo!デベロッパーネットワーク
ヤフー発のメッセージキュー「Pulsar」のご紹介
by
Yahoo!デベロッパーネットワーク
Kinesis Firehoseを使ってみた
by
Masaki Misawa
ゲームエンジニアのためのデータベース設計
by
sairoutine
20150227 IPv6 Summit in FUKUI 2015 IPv6対応webサービスの作り方
by
v6app
Jjug ccc
by
Tanaka Yuichi
20141023 IPv6 Summit in FUKUOKA 2014 IPv6対応Webサービスの作り方
by
v6app
What's hot
PDF
楽天がCloud foundryを選んだ理由
by
Rakuten Group, Inc.
PDF
リアクティブ・アーキテクチャ ~大規模サービスにおける必要性と課題〜 #devsumi
by
Yuta Okamoto
PDF
BaaSでゲームサーバを作る話
by
Tomokazu Tochi
PDF
Scalaのコンパイル速度の話が聞きたいだろうし、するつもりだ
by
yoshiaki iwanaga
PDF
Game BaaS Implemented in Ruby
by
dena_study
PDF
Apache Sparkについて
by
BrainPad Inc.
PPTX
MariaDB+GaleraClusterの運用事例(MySQL勉強会2016-01-28)
by
Yuji Otani
PDF
RDBからの脱却: 新ERP"HUE"におけるCassandra
by
2t3
PDF
チケット駆動のサーバ/インフラ運用における問題点と手動作業の自動化
by
Rakuten Group, Inc.
PDF
[db tech showcase Tokyo 2017] E21: InfluxDB+αで時系列データの異常検知を可視化してみた by 株式会社インサイ...
by
Insight Technology, Inc.
PDF
Strata + Hadoop World 2014 レポート #cwt2014
by
Cloudera Japan
PDF
SAPテクノロジーのプラットフォームはMicrosoft Azureで決まり!
by
Ryusaburo Tanaka
PDF
ベンチャーCTO、AWSエバンジェリストを経て考える、クラウド時代に向き合うエンジニア像のこれから
by
Yasuhiro Horiuchi
PPTX
wordcamp haneda 20190420 Apps Based on WordPress
by
Ryu Shindo
PDF
サーバーサイド技術者不足に効くChef
by
Maho Takara
PDF
コンペに勝てる必勝アイテム ソフトレイヤー
by
Maho Takara
PPTX
Devsumi 2016 b_4 KafkaとSparkを組み合わせたリアルタイム分析基盤の構築
by
Tanaka Yuichi
PPTX
BigDataUnivercity 2017年改めてApache Sparkとデータサイエンスの関係についてのまとめ
by
Tanaka Yuichi
PPTX
エンタープライズでもクラウドファースト! Amazon Web Servicesをフル活用する Developer Summit 2016
by
一成 田部井
PPTX
dbtech showcase 2016 Delphix講演資料
by
Delphix Japan
楽天がCloud foundryを選んだ理由
by
Rakuten Group, Inc.
リアクティブ・アーキテクチャ ~大規模サービスにおける必要性と課題〜 #devsumi
by
Yuta Okamoto
BaaSでゲームサーバを作る話
by
Tomokazu Tochi
Scalaのコンパイル速度の話が聞きたいだろうし、するつもりだ
by
yoshiaki iwanaga
Game BaaS Implemented in Ruby
by
dena_study
Apache Sparkについて
by
BrainPad Inc.
MariaDB+GaleraClusterの運用事例(MySQL勉強会2016-01-28)
by
Yuji Otani
RDBからの脱却: 新ERP"HUE"におけるCassandra
by
2t3
チケット駆動のサーバ/インフラ運用における問題点と手動作業の自動化
by
Rakuten Group, Inc.
[db tech showcase Tokyo 2017] E21: InfluxDB+αで時系列データの異常検知を可視化してみた by 株式会社インサイ...
by
Insight Technology, Inc.
Strata + Hadoop World 2014 レポート #cwt2014
by
Cloudera Japan
SAPテクノロジーのプラットフォームはMicrosoft Azureで決まり!
by
Ryusaburo Tanaka
ベンチャーCTO、AWSエバンジェリストを経て考える、クラウド時代に向き合うエンジニア像のこれから
by
Yasuhiro Horiuchi
wordcamp haneda 20190420 Apps Based on WordPress
by
Ryu Shindo
サーバーサイド技術者不足に効くChef
by
Maho Takara
コンペに勝てる必勝アイテム ソフトレイヤー
by
Maho Takara
Devsumi 2016 b_4 KafkaとSparkを組み合わせたリアルタイム分析基盤の構築
by
Tanaka Yuichi
BigDataUnivercity 2017年改めてApache Sparkとデータサイエンスの関係についてのまとめ
by
Tanaka Yuichi
エンタープライズでもクラウドファースト! Amazon Web Servicesをフル活用する Developer Summit 2016
by
一成 田部井
dbtech showcase 2016 Delphix講演資料
by
Delphix Japan
Similar to Serverless Meetup Japan Virtual #6
PDF
サーバーレスの今とこれから
by
真吾 吉田
PDF
AWSによるサーバーレスアーキテクチャ
by
真吾 吉田
PDF
今なぜサーバーレスなのか
by
真吾 吉田
PDF
サーバーレスのアーキテクチャパターンとそれぞれの実装・テストの勘所
by
真吾 吉田
PDF
20200728 AWS Black Belt Online Seminar What's New in Serverless
by
Amazon Web Services Japan
PDF
20201118 AWS Black Belt Online Seminar 形で考えるサーバーレス設計 サーバーレスユースケースパターン解説
by
Amazon Web Services Japan
PDF
Serverless時代のJavaについて
by
Amazon Web Services Japan
PDF
Serverless Anti-Patterns
by
Keisuke Nishitani
PDF
初心者向けWebinar AWSで開発環境を構築しよう
by
Amazon Web Services Japan
PPTX
サーバーレスで ガチ本番運用までやってるお話し
by
Akira Nagata
PDF
AWS Lambdaによるサーバレスアーキテクチャの基本に触れてみよう!【kintone & AWS ハンズオン祭り2015秋 B-2】
by
Ryu Yamashita
PDF
サーバレスを可能にするAWSサービスの概要
by
Fixel Inc.
PPTX
Wem #14
by
yueguchi
PDF
Serverless Application Security on AWS
by
Amazon Web Services Japan
PDF
AWS Black Belt Online Seminar 2016 AWS上でのサーバーレスアーキテクチャ入門
by
Amazon Web Services Japan
PDF
JAWS-UGアーキテクチャ専門支部 ServerlessConfレポート
by
真吾 吉田
PDF
Going Serverless, Building Applications with No Servers
by
Keisuke Nishitani
PDF
弊社IoT事例とAlexaSkil開発レシピ
by
Takashi Kozu
PDF
[20171116 三木会] AWSを利用したサーバーレス開発の実践 by アイレット株式会社 cloudpack事業部 高橋 直樹 氏
by
Insight Technology, Inc.
PDF
AWS Lambdaによるサーバレスアーキテクチャの基本に触れてみよう!【kintone & AWS ハンズオン祭り2015秋 B-2】
by
JOYZO
サーバーレスの今とこれから
by
真吾 吉田
AWSによるサーバーレスアーキテクチャ
by
真吾 吉田
今なぜサーバーレスなのか
by
真吾 吉田
サーバーレスのアーキテクチャパターンとそれぞれの実装・テストの勘所
by
真吾 吉田
20200728 AWS Black Belt Online Seminar What's New in Serverless
by
Amazon Web Services Japan
20201118 AWS Black Belt Online Seminar 形で考えるサーバーレス設計 サーバーレスユースケースパターン解説
by
Amazon Web Services Japan
Serverless時代のJavaについて
by
Amazon Web Services Japan
Serverless Anti-Patterns
by
Keisuke Nishitani
初心者向けWebinar AWSで開発環境を構築しよう
by
Amazon Web Services Japan
サーバーレスで ガチ本番運用までやってるお話し
by
Akira Nagata
AWS Lambdaによるサーバレスアーキテクチャの基本に触れてみよう!【kintone & AWS ハンズオン祭り2015秋 B-2】
by
Ryu Yamashita
サーバレスを可能にするAWSサービスの概要
by
Fixel Inc.
Wem #14
by
yueguchi
Serverless Application Security on AWS
by
Amazon Web Services Japan
AWS Black Belt Online Seminar 2016 AWS上でのサーバーレスアーキテクチャ入門
by
Amazon Web Services Japan
JAWS-UGアーキテクチャ専門支部 ServerlessConfレポート
by
真吾 吉田
Going Serverless, Building Applications with No Servers
by
Keisuke Nishitani
弊社IoT事例とAlexaSkil開発レシピ
by
Takashi Kozu
[20171116 三木会] AWSを利用したサーバーレス開発の実践 by アイレット株式会社 cloudpack事業部 高橋 直樹 氏
by
Insight Technology, Inc.
AWS Lambdaによるサーバレスアーキテクチャの基本に触れてみよう!【kintone & AWS ハンズオン祭り2015秋 B-2】
by
JOYZO
Recently uploaded
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
アジャイル導入が止まる3つの壁 ─ 文化・他部門・組織プロセスをどう乗り越えるか
by
Graat(グラーツ)
PDF
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
アジャイル導入が止まる3つの壁 ─ 文化・他部門・組織プロセスをどう乗り越えるか
by
Graat(グラーツ)
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
Serverless Meetup Japan Virtual #6
1.
本の概要やポイント紹介 2020.09.10 Thu - Kenichiro
Wada - Yu Fukuda - Toshiaki Aoike Serverless Meetup Japan Virtual #6
2.
装丁 ■ 基礎から学ぶサーバーレス開発 ■ 価格:2,780円+税 ■
ISBNコード:978-4-86354-314-0 ■ 本のサイズ:A5判/ソフトカバー https://www.c-r.com/book/detail/1352 2
3.
装丁 本書はサーバーレス開 発の基本から実践、導 入するにあたっての注 意事項などを丁寧に解 説しています。現場のノ ウハウが満載の1冊で す。 3
4.
著者紹介!
5.
自己紹介 和田 健一郎 ▷ iret
コーポレート統括本部 社内インフラS 社内開発G所属 JAWS-UG千葉とSORACOM UG運営やってます ▷ 好きなAWSサービスはAWS Lambda
6.
自己紹介 福田 悠海 ▷ ジャパニーズトラディショナルメディアカンパニー所属 データ分析チーム ▷
8月に息子が生まれました
7.
自己紹介 青池 利昭 ▷ iret
CI事業部 セキュリティセクション所属 ▷ 座右の銘「怠惰を求めて勤勉に行き着く」
8.
ここでお話しすること 基礎から学ぶサーバーレス開発をおすすめ したい人とおすすめポイント
9.
本書をおすすめしたい人 ❏ EC2での開発経験者でサーバレスに乗り換えたい技術者 ❏ お客様にサーバレスっていいよねって言われた技術者 ❏
とりあえずサーバーレスを触ってみたい技術者 9
10.
本書をおすすめしたい人 ❏ EC2での開発経験者でサーバレスに乗り換えたい技術者 ❏ お客様にサーバレスっていいよねって言われた技術者 ❏
とりあえずサーバーレスを触ってみたい技術者 これからサーバーレス開発を始 める (たい) 人 10
11.
おすすめポイント ❏ サーバーレス開発での経験から得た内容を盛り込み ❏ Lambda
を中心に開発で必要なポイントを紹介 ❏ ツール類は極力最新のものを利用 ❏ コンソールの出力内容は全て記載 ❏ お話できるレベルの失敗談も記載 ❏ サンプルコードもダウンロード可能 11
12.
構築事例の解説 2020.09.10 Thu - Kenichiro
Wada - Yu Fukuda - Toshiaki Aoike Serverless Meetup Japan Virtual #6
13.
ここでお話しすること 本で紹介した構築例を掘り下げてお話
14.
構築例 QR決済が利用できる店舗検索サイト -執筆経緯- 本書ではECサイトのように記述していますが、 実はQR決済可能な店舗を検索するサイトです 14
15.
構築例 QR決済が利用できる店舗検索サイト -執筆経緯- 男たちはグランドラインを目指し、 夢を追い続ける。 世はまさに、大サーバーレス時代!! 当時iretのサーバーレスゴリ押しの部署にいて サーバーレスだけでサービスを実現することを考えてい た。 これは業務命令でボーナスをかけた戦いだった。 15
16.
構築例 QR決済が利用できる店舗検索サイト -執筆経緯- フロントはNuxt.jsでiretのデザインチームに依頼してい た。 [広告]iretはインフラからフロントまで開発・運用・保守で きます。 インフラとバックエンドは私のチームでSAMで開発した。 16
17.
構築例 QR決済が利用できる店舗検索サイト -執筆経緯- Aurora ServerlessがGAになったので本番に耐えれるか 検証しながら開発していた。 当時はDynamoDBかサーバーフルRDSが羨ましかっ た。 17
18.
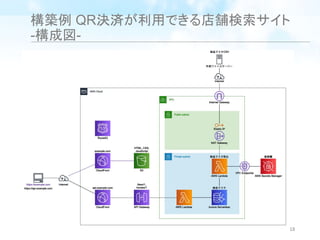
構築例 QR決済が利用できる店舗検索サイト -構成図- 18
19.
構築例 QR決済が利用できる店舗検索サイト -ポイント- 店舗検索APIは現在地の座標をPOSTして 最寄りの店舗を返すもの。 リリース時には店舗数が2万件くらいだった。 この時点でキャパシティーユニットは4、 ランチタイムのピークとキャンペーン期間は8に スケールすることがあった。余裕。 サービス開始1ヶ月経つと店舗数が14万件になった。 これはもう想定していた件数の3倍以上。 19
20.
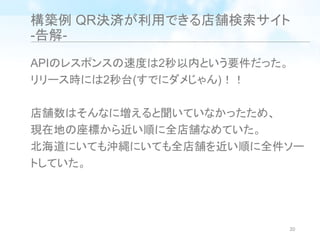
構築例 QR決済が利用できる店舗検索サイト -告解- APIのレスポンスの速度は2秒以内という要件だった。 リリース時には2秒台(すでにダメじゃん)!! 店舗数はそんなに増えると聞いていなかったため、 現在地の座標から近い順に全店舗なめていた。 北海道にいても沖縄にいても全店舗を近い順に全件ソー トしていた。 20
21.
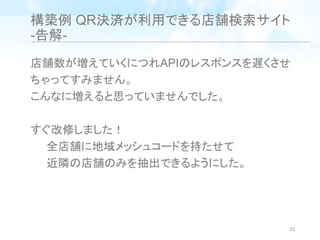
構築例 QR決済が利用できる店舗検索サイト -告解- 店舗数が増えていくにつれAPIのレスポンスを遅くさせ ちゃってすみません。 こんなに増えると思っていませんでした。 すぐ改修しました! 全店舗に地域メッシュコードを持たせて 近隣の店舗のみを抽出できるようにした。 21
22.
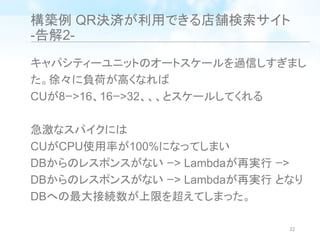
構築例 QR決済が利用できる店舗検索サイト -告解2- キャパシティーユニットのオートスケールを過信しすぎまし た。徐々に負荷が高くなれば CUが8ー>16、16ー>32、、、とスケールしてくれる 急激なスパイクには CUがCPU使用率が100%になってしまい DBからのレスポンスがない ー>
Lambdaが再実行 ー> DBからのレスポンスがない ー> Lambdaが再実行 となり DBへの最大接続数が上限を超えてしまった。 22
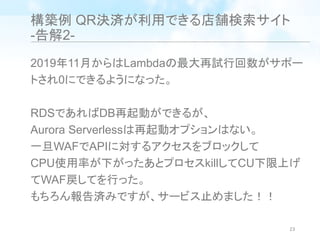
23.
構築例 QR決済が利用できる店舗検索サイト -告解2- 2019年11月からはLambdaの最大再試行回数がサポー トされ0にできるようになった。 RDSであればDB再起動ができるが、 Aurora Serverlessは再起動オプションはない。 一旦WAFでAPIに対するアクセスをブロックして CPU使用率が下がったあとプロセスkillしてCU下限上げ てWAF戻してを行った。 もちろん報告済みですが、サービス止めました!! 23
24.
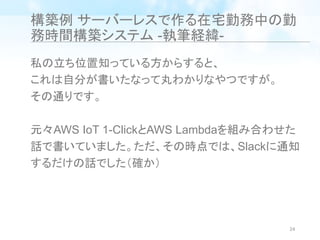
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -執筆経緯- 私の立ち位置知っている方からすると、 これは自分が書いたなって丸わかりなやつですが。 その通りです。 元々AWS
IoT 1-ClickとAWS Lambdaを組み合わせた 話で書いていました。ただ、その時点では、Slackに通知 するだけの話でした(確か) 24
25.
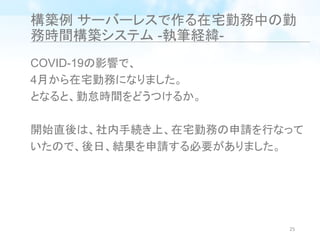
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -執筆経緯- COVID-19の影響で、 4月から在宅勤務になりました。 となると、勤怠時間をどうつけるか。 開始直後は、社内手続き上、在宅勤務の申請を行なって いたので、後日、結果を申請する必要がありました。 25
26.
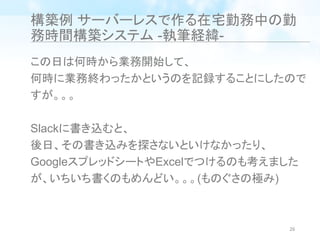
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -執筆経緯- この日は何時から業務開始して、 何時に業務終わったかというのを記録することにしたので すが。。。 Slackに書き込むと、 後日、その書き込みを探さないといけなかったり、 GoogleスプレッドシートやExcelでつけるのも考えました が、いちいち書くのもめんどい。。。(ものぐさの極み) 26
27.
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -執筆経緯- どうしたものかと思った時に、 手元にソラコムさんの「SORACOM
LTE-M Button powered by AWS(LTE-M Button)」 があったので、それを使ってボタンを押した時刻をGoogle スプレッドシートに出勤時間、退勤時間を書き込むという 仕組みを作りました。 なお、同じことを考えていた人は、ソラコムさん界隈には たくさんいたようです。 27
28.
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -執筆経緯- 実際作って、実際に動いた段階で、 時事ネタでもあるし、これこそ、まさしく構築例だなってこと で、本にも書いた次第です。 来年あたりにはレガシーになっているかもしれませんが。 28
29.
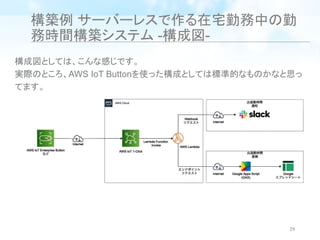
構成図としては、こんな感じです。 実際のところ、AWS IoT Buttonを使った構成としては標準的なものかなと思っ てます。 構築例
サーバーレスで作る在宅勤務中の勤 務時間構築システム -構成図- 29
30.
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -ポイント- ボタン自体は3種類のアクション -
ワンクリック - ダブルクリック - 長押し が使えますが、ワンクリックだと、なんかの拍子に動くこと もある(とはいえ、滅多にないですが)ので、 ダブルクリックで出勤、 長押しで退勤にしてます。 30
31.
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -ポイント- Slack通知は、もともとSlackに通知する仕組み自体は あって、流用したので、まあ稼動確認も兼ねて行なってま す。 今思うと、この部分はAmazon
SESもしくはAmazon SNS使ってメール飛ばすにしておけばよかったかなって 思ってます。 31
32.
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -ポイント- Googleスプレッドシートへの書き込みは、 APIを使うことも考えたのですが、 スピード重視で、Google
Action ScriptでAPI作ってます。 (かこにちょっと作ったことがあったので) 32
33.
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -ポイント- 実際に作ってみるのであれば、 比較的簡単にできる(IoT
1-Clickのところ、ちょっと面倒か も)と思いますので、 もし、本を買われた際には、実際作ってみてはいかがで しょうか。 なお、出版社のサイトに行きますと、サンプル(そのまま動 くんですが)が置いてあります。 33
34.
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -ポイント- 注意点としては、 当然、ボタンがないとつかないシステムではあります。 現状、日本国内で入手可能なIoT
Buttonはソラコムさん のボタンだけなので、これは買わないとダメです。 (税込7980円だったかな) 34
35.
構築例 サーバーレスで作る在宅勤務中の勤 務時間構築システム -後日談- 個人的には、今もこの仕組み自体は使ってます。 書いた時から、若干進化してまして、 今は勤怠システムに出退勤登録自体をするようになって ます。 35
36.
構築例 その他 これ以外にも、Alexaスキルと作ってみたり、下記のようなよくありそうなVPC Lambdaの構成が、2019年のアップデートで劇的に変わりましたって話を書い てます。 36
37.
本にかけなかったポイント 2020.09.10 Thu - Kenichiro
Wada - Yu Fukuda - Toshiaki Aoike Serverless Meetup Japan Virtual #6
38.
ここでお話しすること 本には書けなかった(もうちょっと書きたかっ た)ポイントについて
39.
本には書けなかった(もうちょっと書きたかった)ポイントにつ いて -VPC Lambdaのアップデート- 構築事例について、VPC
Lambdaの2019年のアップデート について、触れていますが、 VPC Lambdaで色々とあった(何度サポート問い合わせした ことか)人間としては、 2019年のアップデートは、非常に興味ありました。 (この時点ではVPC Lambda案件からは離れていたのです が。。。) 39
40.
本には書けなかった(もうちょっと書きたかった)ポイントにつ いて -VPC Lambdaのアップデート- AWSJさん主催のセミナー(Loftまた行きたい)参加したり、 自分で検証も実施してみたのですが、 本に詰め込むまでには至りませんでした。 RDS
Proxyについては、執筆中はPreviewで、 GAになったのは、校了直前。。。 できたことは、 「現在はPreviewです」の文字を外すことだけ。。。 40
41.
本には書けなかった(もうちょっと書きたかった)ポイントにつ いて -VPC Lambdaのアップデート- なので、機会があれば、 VPC
Lambdaのアップデートについては それぞれについて、もうちょっと掘り下げて書きたいですね。 なお、Qiitaには書く予定です。 41
42.
ここでお話しすること 本には細かく書いていないけど補足したい ポイント
43.
ここからお話しすること CHAPTER 02 サーバーレス開発でよく使うサービス にちょい足し
44.
補足したいポイント ❏ 直感的に使えるけど使いこなすには学習コストが必要 ❏ クォータはきちんと理解しておこう ❏
開発期間より運用期間のほうが長い 44
45.
直感的に使えるけど使いこなすには学習コストが必要 API Gateway や
Lambda を組み合わせて動くものを作るのは簡単。 でもシステムとして運用に耐えるレベルにするはきちんとした基礎知識(制 限や仕様の把握)の習得が絶対条件。 開発用と本番用の Lambda ってバージョン+エイリアスで管理すべきです か? それとも分けるべきですか? 45
46.
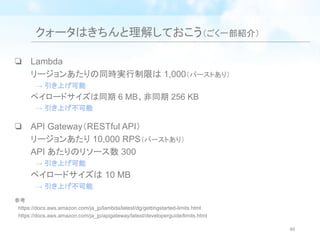
クォータはきちんと理解しておこう(ごく一部紹介) ❏ Lambda リージョンあたりの同時実行制限は 1,000(バーストあり) →
引き上げ可能 ペイロードサイズは同期 6 MB、非同期 256 KB → 引き上げ不可能 ❏ API Gateway(RESTful API) リージョンあたり 10,000 RPS(バーストあり) API あたりのリソース数 300 → 引き上げ可能 ペイロードサイズは 10 MB → 引き上げ不可能 参考 https://docs.aws.amazon.com/ja_jp/lambda/latest/dg/gettingstarted-limits.html https://docs.aws.amazon.com/ja_jp/apigateway/latest/developerguide/limits.html 46
47.
開発期間より運用期間のほうが長い マネージドサービスを組み合わせることで素早くシステムを作ることができ ます。 が、それは本当に運用に耐える構造になっていますか? リリースしてからの運用で辛い思いしませんか? Lambda のコードに不具合があった場合に前のバージョンに戻す方法用 意していますか? 47
48.
ここからお話しすること CHAPTER 05 サーバーレス開発におけるセキュリティ にちょい足し
49.
CHAPTER 05 目次 ❏
APIのセキュリティ ❏ 秘密情報の保護 ❏ アカウントのセキュリティ 49
50.
アカウントセキュリティのポイント クラウドセキュリティの問題の多くは設定ミスに起因しています。 そこでクラウドセキュリティポスチャマネジメント(Cloud Security Posture Management、CSPM)の導入を。 設定ミスの検出や、スタンダードフレームワークへの準拠チェック、異常行 動の検知といった包括的なアカウントの保護が可能に。 サーバーレスではホストにアンチウィルスソフトの導入は必要ありません。 (そんなことは我々利用者にはできません。) セキュアコーディングは忘れずに。 50
51.
before クラウド データセンターで運用中のシステムのインフラストラクチャの追加は物理的 な増設が必要。 結果、事前に手順を入念に確認して、現場では限られた人間が手順に従 いクロスチェックを行いながら慎重を期して行動。 そして (多重)境界防御
により「内側」と「外側」を分けてセキュリティを確保 しようとした。 51
52.
after クラウド APIを実行すれば、地球の裏側にすぐにサーバーやデータストアを用意可 能。 全てのオペレーションがクラウドベンダーの努力のおかげで誰にでも簡単 に行えるようになった。 権限があれば誰でも簡単に設定を変更したりインフラを増減することがで きるようになった。 結果、なんとなく行った設定が情報漏洩の危険やアカウント不正利用のリ スクに繋がることに。 52
53.
after クラウド(概念的はbeforeのときからある) 人はミスをする ↓ ミスは誰にでもあることなのでミスがあることを前提にすべき (ミスは無いに越したことはないが撲滅は難しい) ↓ なら、ミスがあれば検知して対応する 性善説や個人に依存するではなく仕組みとして対策を。 オンプレだと自分で仕組みを作るのは容易ではない。 53
54.
クラウドセキュリティポスチャマネジメント すごくざっくりいうと・・ IaaS(PaaS)をセキュリティリスクから保護する。 たとえば、 情報流出 アカウントの不正利用 このようなリスクがないように継続的に評価し、適切な状態を維持するため の取り組み。 54
55.
AWSなら何を使えばいい? AWS CloudTrail AWS Config AWS
Trusted Advisor AWS Security Hub Amazon GuardDuty Amazon Detective etc ... 55
56.
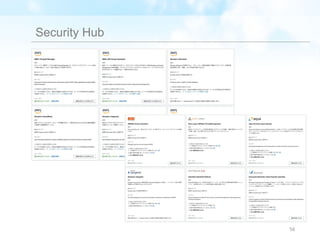
Security Hub 56
57.
サービスのざっくり棲み分け一例 インシデントを検知 インシデントを調査 アクティビティを記録 リソースの評価と設定の記録 アカウントのベストプラクティスと推奨事項の評価 インシデントを発報 57
58.
ここでのまとめ ❏ サーバーレスでもセキュリティへの取組みは必要 ❏ インシデントの検知、調査の仕組みの準備は重要 ❏
セキュリティサービスの導入はコストではなく投資 58
59.
執筆体験談や苦労話 2020.09.10 Thu - Kenichiro
Wada - Yu Fukuda - Toshiaki Aoike Serverless Meetup Japan Virtual #6
60.
ここでお話しすること 執筆時に感じた事や苦労話について
61.
執筆体験談 - 執筆準備期間 ❏
大綱スケジュールの計画 ❏ 大まかな計画(本の章などをどうするか) 61
62.
執筆体験談 - 執筆初期 ❏
re:Inventの影響をうけなさそうなところから執筆 ❏ MD形式で執筆単位にフィーチャーブランチを作成 ❏ 執筆者以外の二名がレビュー 62
63.
執筆体験談 - 執筆中期 ❏
新しい AWS の機能の理解のために勉強 ❏ 年度末でちょこっと現実逃避 63
64.
執筆体験談 - 執筆終期 ❏
GitLab のパイプラインで .md を PDF に変換する仕組みを組み込む ❏ textlintで文章チェック機能を導入 ❏ サンプルプログラムのクロスチェックの実施 64
65.
執筆体験談 - 校正期 ❏
初校の確認 ❏ 再校の確認 ❏ 念校の確認 ❏ 最終校の確認 65
66.
反省点 ❏ textlint の導入の遅さ ❏
もっと短期間で集中してアウトプットすればよかった 66
67.
良かったこと ❏ 業務上接点の殆どないメンバーと情報共有ができた ❏ 主体的な行動ベースで執筆がすすんだ ❏
GitLab の理解が進んだ ❏ 本を書くという事がいかに難しいかがよくわかった ❏ クラウドな執筆環境を用意できた 67
68.
次あればやりたいこと ❏ クラウドな執筆環境を更にすすめる 68
69.
ここでのまとめ 色々と書きましたが、初めての事だらけで「ああすれば良かったのかなー」と か思うこともたくさんありましたが、手探りで勧めながらも貴重な経験も多く あり、個人的良い経験になりました。 機会があればチャレンジした方が良いこと間違いなしです! 69
70.
おまけ 今回の執筆活動で利用したものをベースに .md ファイルを
PDF に変換す る CI を含む GitHub と GitLab のリポジトリのテンプレートを作ってます。 興味があれば利用してみてください。 GitHub用 https://github.com/Ricordanza/template-writing GitLab用 https://github.com/Ricordanza/template-writing-with-gitlab 70
71.
実践構築サンプルの裏話 実践構築として、4つほどあげてますが、 その中のAlexaスキルの構築例ですが、 元々自前で作っていたのをベースにしようとしていました が、 ちょっとマニアックすぎたので、結構悩みました。 Amazon DeveloperサイトのAlexaスキルのところに、 初心者向けのいいサンプルがあったんですが、 それをそのまま使うわけには行かず。。。 71
72.
実践構築サンプルの裏話 ということで、Alexaスキルの実践構築例は、 今回ほぼ手作りです。 実際に3人で作って、動作確認済みなので、問題はないは ず。 72
73.
実践構築サンプルの裏話 本を読んで、じゃあサーバーレスでなんか作ってみようだ と、 AWS Hands-on for
Beginnersに素晴らしいハンズオン資 料ありますし、 誰かに教えてもらいながらだと、JAWS-UGの各支部でオン ラインハンズオンとかしているので、それに参加した方がい いかもしれませんね。 73
74.
執筆体験談 - 執筆期間中にアイレット卒業 ❏
執筆前と執筆後で会社変わりました。 ❏ アイレットが支払いしてくれるAWSアカウントで構築していた。 ❏ 転職後に改めて1から構築しなおして執筆した 新しくなったUIでスクショ撮れたから逆によかったかも ❏ CMSはAmplify使っていたのでいつかアウトプットできたらいいなー 74
75.
執筆体験談 - 個人的な環境 ❏
iPadで執筆していたが、Gitとエディタの使い勝手があまり良くなかった。 Working Copyというアプリを使っていた。 Gitpodは飛行機の中で使えなかったため、ローカル作業したかった。 ❏ 温泉で書くのいいよ!! 75
76.
執筆体験談 - 怒涛のTypo ❏
青池さんの反省点と重複すると思うが 書き方のルール統一を一番初めにしなかったことが反省 「章」or「チャプター」、「節」or「セクション」 ❏ 締め切りの1週間前に誤字脱字を発掘 めっちゃ甘えですが編集担当の方がいい感じに直してくれると思っていた ❏ 最後の修正が一番キツかった!!! 76
77.
執筆体験談 - みなさん本当にありがとう ❏
最初から最後まで楽しかった ❏ 青池さんに執筆環境整えてもらって プレビュー用のPDFみてページ数の足らなさに絶望したり ❏ わだけんさんのAlexaスキルのレビュー中に遊んでて 妻にかわいそうな人を見る目で見られたり ❏ 私が担当したパートは事例を書くだけなので難しいとか、書けないとかは 一切なかった。 ❏ 文字に起こすだけなので2人と比べれば楽をさせてもらった。 77
78.
執筆体験談 - みなさん本当にありがとう 78 一緒に執筆した2人と 執筆の話を持って来てくれた妻と 出版社の担当の方に感謝です!!!
Download











![構築例 QR決済が利用できる店舗検索サイト
-執筆経緯-
フロントはNuxt.jsでiretのデザインチームに依頼してい
た。
[広告]iretはインフラからフロントまで開発・運用・保守で
きます。
インフラとバックエンドは私のチームでSAMで開発した。
16](https://image.slidesharecdn.com/20200910serverlessmeetupjapanvirtual6-200911032548/85/Serverless-Meetup-Japan-Virtual-6-16-320.jpg)










































![[db tech showcase Tokyo 2017] E21: InfluxDB+αで時系列データの異常検知を可視化してみた by 株式会社インサイ...](https://cdn.slidesharecdn.com/ss_thumbnails/e21-170912082211-thumbnail.jpg?width=640&height=640&fit=bounds)




























![[20171116 三木会] AWSを利用したサーバーレス開発の実践 by アイレット株式会社 cloudpack事業部 高橋 直樹 氏](https://cdn.slidesharecdn.com/ss_thumbnails/2aws-171130004633-thumbnail.jpg?width=640&height=640&fit=bounds)










