Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
NM
Uploaded by
Nima Mahmoudi
88 views
Seminar
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 35
2
/ 35
3
/ 35
4
/ 35
5
/ 35
6
/ 35
7
/ 35
8
/ 35
9
/ 35
10
/ 35
11
/ 35
12
/ 35
13
/ 35
14
/ 35
15
/ 35
16
/ 35
17
/ 35
18
/ 35
19
/ 35
20
/ 35
21
/ 35
22
/ 35
23
/ 35
24
/ 35
25
/ 35
26
/ 35
27
/ 35
28
/ 35
29
/ 35
30
/ 35
31
/ 35
32
/ 35
33
/ 35
34
/ 35
35
/ 35
More Related Content
PDF
Robust Vision-Based Simultaneous Multi-Target Tracking
by
Nima Mahmoudi
DOCX
Андрей Белоус
by
Volkovblog
PDF
LIGHTING IN FILM
by
OllieRhoda
PPTX
Natalinci 5
by
zokilili13
PDF
Drafting of a Patent Specification
by
BananaIP Counsels
PPTX
Upt (2)
by
cristian17h
PDF
Sage x3 Solution Manufacturing
by
VTS Solutions Inc.
PDF
일본 문부과학성의 교육용 클라우드 플랫폼
by
Kyubok Cho
Robust Vision-Based Simultaneous Multi-Target Tracking
by
Nima Mahmoudi
Андрей Белоус
by
Volkovblog
LIGHTING IN FILM
by
OllieRhoda
Natalinci 5
by
zokilili13
Drafting of a Patent Specification
by
BananaIP Counsels
Upt (2)
by
cristian17h
Sage x3 Solution Manufacturing
by
VTS Solutions Inc.
일본 문부과학성의 교육용 클라우드 플랫폼
by
Kyubok Cho
Similar to Seminar
PPTX
poroje pish bini bar dar sistem haie enerzhi - [www.wikipower.ir].pptx
by
mehdimansouri16
PPTX
پیش بینی خوشه هاي لرزه اي پرخطر به روش شبکههاي عصبی کوهونن ( Masoud Azad Rem...
by
Masoud Azad
PDF
نگار پژوه :: آموزش کاربردی بهینه سازی الگوریتم ازدحام ذرات چند هدفه
by
Mojtaba Hasanlu
PDF
آزمایش سازه ای
by
Hamidreza Ghaem Maghami
PDF
Fuzzy Inference for Intrusion Detection of Web Robots in Computer Networks (P...
by
Wright State University, Dayton, OH, USA
PDF
آموزش کارآمد علم ارگونومی در برنامه مطالعه مهندسی صنایع
by
Siamak H. Mehrabani
PPT
Primetry
by
Hossein Mirzaie
PDF
finalThesis.pdf
by
mahyamk
PDF
torsion concrete reinforced amirkabir thech
by
AmirhusseinShafiezad
PPTX
Approximate String Matching
by
nazi asadpour
PPTX
Surface foundation Presentation1235.pptx
by
HamedNazeem
PPTX
1
by
sinaexe
PPT
RULA tool for assessing posture in ergonomics
by
neginhemmati96
PDF
آزمایشگاه ژئوفیزیک
by
Koorosh Parvaz
PDF
برآورد میزان نشست ناشی از روانگرایی فونداسیونهای سطحی
by
Abolfazl Najafi
DOCX
Time series data mining
by
Mohamad Mirmohamad
PDF
Dynamics of structures presentation by Doctor Asal
by
zub123
PPTX
پایانامه تحصیلی برای دریافت درجه کارشناسی ارشد مهندسی
by
S.sajad mousavi.nejad.S
PDF
آموزش آمار و احتمال مهندسی - بخش ششم
by
faradars
PDF
Vibration
by
behzad akbarian
poroje pish bini bar dar sistem haie enerzhi - [www.wikipower.ir].pptx
by
mehdimansouri16
پیش بینی خوشه هاي لرزه اي پرخطر به روش شبکههاي عصبی کوهونن ( Masoud Azad Rem...
by
Masoud Azad
نگار پژوه :: آموزش کاربردی بهینه سازی الگوریتم ازدحام ذرات چند هدفه
by
Mojtaba Hasanlu
آزمایش سازه ای
by
Hamidreza Ghaem Maghami
Fuzzy Inference for Intrusion Detection of Web Robots in Computer Networks (P...
by
Wright State University, Dayton, OH, USA
آموزش کارآمد علم ارگونومی در برنامه مطالعه مهندسی صنایع
by
Siamak H. Mehrabani
Primetry
by
Hossein Mirzaie
finalThesis.pdf
by
mahyamk
torsion concrete reinforced amirkabir thech
by
AmirhusseinShafiezad
Approximate String Matching
by
nazi asadpour
Surface foundation Presentation1235.pptx
by
HamedNazeem
1
by
sinaexe
RULA tool for assessing posture in ergonomics
by
neginhemmati96
آزمایشگاه ژئوفیزیک
by
Koorosh Parvaz
برآورد میزان نشست ناشی از روانگرایی فونداسیونهای سطحی
by
Abolfazl Najafi
Time series data mining
by
Mohamad Mirmohamad
Dynamics of structures presentation by Doctor Asal
by
zub123
پایانامه تحصیلی برای دریافت درجه کارشناسی ارشد مهندسی
by
S.sajad mousavi.nejad.S
آموزش آمار و احتمال مهندسی - بخش ششم
by
faradars
Vibration
by
behzad akbarian
Seminar
1.
Occlusion Geodesics هدف چند
همزمان ردیابی برای ارائه:محمودی نیما استاد:فائز دکتر شهریور94 1
2.
مطالب فصل سر مقدمه مرتبط
کارهای از استفاده با ردیابیOcclusion Geodesics ارزیابی گیری نتیجه و بحث 2
3.
مقدمه3
4.
مقدمه ویدیویی آنالیز کاربردهای
در ها چالش مهمترین از یکی(ی تصویری نظارت همانندآنالیز ا ورزش) از استفاده با ردیابی روی بر زمینه این در تمرکز اخیر سالهای درآشکارسازیبواست ده زمینه در سریع های پیشرفت امر این علتآشکارسازیاست بوده همانندPoselet،هاHOGوDPM شود می تبدیل داده تخصیص مساله یک به هدف چند همزمان ردیابی نتیجه در نتایج باید صورت این درآشکارسازیمسیر و شده متصل یکدیگر بههاییت راشکیل دهند بهترین زیرا ،است دشوار ای مساله همچنان مساله اینآشکارسازهاپیچ تصاویر در نیزیده شوند می خطا دچار 4
5.
ادامه ،مقدمه از بسیاریالگوریتمهایصورت
به را داده تخصیص مساله ردیابیآفالینمی حلکنند پردازند می بزرگ زمانی های پنجره در سازی بهینه به برخی پردازند می ویدیو کل روی بر سازی بهینه به نیز دیگر برخی آشکارساز مشکالت از بسیاری بر روشها این ،آینده زمانهای اطالعات از استفاده باچیره شوند می ای باعث ویدیو کل روی بر یا و ها فریم از بزرگی های دسته در پردازش وجود این باجاد شود می جسم موقعیت تخمین و تصویر مشاهده بین زیاد تاخیر دارند اهمیت زمان آنها در که کاربردهایی در روشها این دلیل این به(امنیت مانند ترافیکی)نیستند استفاده قابل از استفاده با تنها که دارد وجود روشهایی به نیاز ،کاربردهایی چنین درفریمهایقو بلی زمان صورت به-بدهند جسم موقعیت از مقاوم تخمینی بتوانند واقعی 5
6.
ادامه ،مقدمه(2) خ صورت
در معموال ،کننده می استفاده قبلی های فریم از تنها که آنالین روشهایطای شوند می خطا دچار ،جسم جلوی مانعی وجود دلیل به آشکارساز دستیاب و آنالین روشهای های محدودیت به غلبه برای روشی ارائه مقاله این از هدفبه ی روشهای همانند دقتیآفالیناست بین پیش برای اطمینانی معیار از ،مانع وجود صورت در خطا مشکل به غلبه برایی مربوط اطالعات مانند هندسی اطالعات از تنها که است شده استفاده جسم موقعیتبه کند می استفاده حرکت بینی پیش و آشکارساز اطمینان میزان ،مانع تولید روشهای از گرفتن الهام با ،این بر عالوهTrackletبرخی در پایین سطح های روشهایآفالینمحافظه روشی از مقاله این ،کارانهتا است کرده استفادهآشکارسازیهارا کنیم مرتبط مشاهده قابل و جدا مسیرهای به در ما روش بازدهی افزایش در روش اینسناریوهایکند می بسیاری کمک پیچیده 6
7.
مرتبط کارهای7
8.
مرتبط کارهای مشکلتریناز استفاده
با ردیابی مساله بخشآشکارسازیداده تخصیص بخشاست های داده تخصیص چگونگی(نویز حاوی احتماال)به مربوطآشکارسازیرد مسیرهای بهیابی روشهای توسط مساله این اواخر همین تااحتماالتیشده می حلاند وج ابهامات حل برای کافی داده تا دارند می نگاه خود در را فرضیه چندین روشها اینود باشد داشته ابعاد افزایش با معموال روشها این پیچیدگی ،فرضیات وسیع فضای به توجه بابه مساله یابد می افزایش نمایی طور 8
9.
ادامه ،مرتبط کارهای به
مسیر تخصیص دیگر روشآشکارسازیهااز استفادهالگوریتمهایاس حریصانهت ویدیو دوره یک تمام روی بر مسیرها سازی بهینه بر شده ارائه روشهای برخی اخیرایا و تخصیص مساله حل برای بزرگ زمانی های پنجرهکرده تمرکزاند روشهای درآفالینبه سازی بهینه مساله کردن تر ساده برای برخی ،روشها این همانند پردازند می فضا سازی گسسته موفق روشهای از دیگری گروهآفالینکنند می استفاده ای مرحله چند روش یک از ،پایین سطح پردازش پیش مرحله یک در روشها این درآشکارسازیهامت یکدیگر به رامی صل آنها به که شوند ایجاد اطمینانی قابل اما کوتاه مسیرهای تا کنندTrackletشود می گفته صحیح اتصال اصلی مساله روشها این درTrackletاست نهایی مسیرهای ایجاد برای ها روشهاییتخصیص آموزش یا و ،ظاهر و حرکت مدلهای ترکیب مانندTrackletروی از کنند می کار اساس این بر آموزشی داده 9
10.
از استفاده با
ردیابیOcclusion Geodesics10
11.
با ردیابیاز استفادهOcclusion Geodesics گردد
می اجرا مرحله دو در شده پیشنهاد روش اول مرحله:محافظه اتصال استراتژی یک از مرحله این درکارانهمی استفادهشود.درنتیجه درشوند می ردیابی مشاهده قابل و جداگانه اجسام مرحله این دوم مرحله:و جسم حرکت مدل اساس بر که هزینه تابع یک تعریف با مرحله این در از استفاده با و ممکن مسیرهایOcclusion Geodesics(مسیرهاییکمترین با هزینه)آنه جلوی مانعی کلی یا و جزئی طور به زمان از ای بازه در که اجسامی ردیابی بهقرار ا پردازیم می گیرد می خطای که کند می عمل مشاهده این اساس بر شده پیشنهاد روشآشکارسازهامعموال مانع یک توسط یا مانعی که افتد می اتفاق زمانیدینامیکث موانع توسط یا ودر ابت تصویر(و درختان ،ها مجسمه مانند)...دارد وجود اجسام جلوی اختصاص اطمینانی معیار جسم هر بر ممکن مسیرهای به شده پیشنهاد جدید تابعمی دهد ،معیار این تعریف برای نتیجه درازاطمی میزان و هدف تحرک تخمین ،مانع اطالعاتنان می استفاده آشکارساز بهشود 11
12.
با ردیابیاز استفادهOcclusion Geodesicsادامه
، پردازیم می زیر بخش چهار در مقاله این در پیشنهادی روش بررسی به حال: محافظه داده تخصیصکارانه Occlusion Geodesicsداده تخصیص برای اطمینان معیارهای پایان و اولیه دهی مقدارالگوریتم 12
13.
محافظه داده تخصیصکارانه واق
دنیای مختصات در ردیابی نیز مقاله این در ،ها روش بهترین از بسیاری همانندعی شود می انجام ان بودن نزدیک معیار با اجسام دیگر از جدا و مشاهده قابل اجسام ردیابی بنابراینمی جام شود داشتن با بنابراین𝑁 𝑂زمان در مسیرt-1تخصیص هزینه ماآشکارسازیjجسم بهiبا فاصلهاقلیدسیشده مشاهده قبلی موقعیت اساس بر زیر صورت به و𝑥𝑖 𝑡−1 می تعریف شود 𝜓𝑖𝑗 𝑡 = 𝑥𝑗 𝑡 − 𝑥𝑖 𝑡−1 𝑖𝑓 𝑥𝑗 𝑡 − 𝑥𝑖 𝑡−1 < 𝜏 𝑐 ∞ 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒 رابطه این در که𝜏 𝑐محافظه فاصله آستانهکارانهاست 13
14.
محافظه داده تخصیصکارانهادامه
، بهینه تخصیص کردن پیدا برایآشکارسازیهامحافظه مسیرهای بهکارانهم این ،از قاله الگوریتمHungarian[1]محاسبه برایماتریسکند می استفاده تخصیصهز تاینه سازد حداقل را زیر کلی 𝐴∗ = 𝑎𝑟𝑔𝑚𝑖𝑛 𝐴 𝑖=1 𝑁 𝑂 𝑗=1 𝑁 𝐷 𝜓𝑖𝑗 𝑡 𝑎𝑖𝑗 𝑡 یاف آشکارساز توسط باشند نشده داده تشخیص مرحله این انتهای در که اجسامینشده ت اند ،شوند پیدا دوباره شده گم اجسام که صورتی در نتیجه درآشکارسازیهایب آیندهبه اید شوند داده تخصیص مسیرها این از استفاده با بعدی بخش درGeodesicsپردازیم می مساله این حل به 14 1-Munkres, J. (1957). Algorithms for the assignment and transportation problems.Journal of the Society for Industrial and Applied Mathematics, 5(1), 32-38.
15.
Occlusion Geodesicsبرای داده تخصیص ش
پنهان محل از ممکن مسیرهای به اطمینان معیار یک از استفاده با بخش این دردن کند می دهی وزن آن مجدد شدن پیدا تا آشکارساز دید از جسم از استفاده باOcclusion Geodesics(معیار نسبت به مسیرها کوتاهترین اطمینان)به را گمشده اجسام توان میمسیرشانداد تخصیص مجددا بهترین خالف برکه موجود روشهایگ مسیرهای از ابهام رفع برای ظاهری مدلهای بهم مسیر مجدد تخصیص برای هندسی اطالعات از تنها اینجا در ،شوند می متکی شدهبه شوند می استفاده جسم 15
16.
Occlusion Geodesicsبرای تخصیصادامه ،داده جسم
اطمینان میزانiمحل در حضور برایxبه آشکارساز توسط نشدن یافت از پس مدت𝛿𝑖شود می تعریف زیر صورت به فریم 𝜑𝑖 𝛿 𝑖 𝑥 = 𝑐 𝑜,𝑖 𝛿 𝑖 (𝑥)𝑐 𝑝,𝑖 𝛿 𝑖 (𝑥)𝑐 𝑑,𝑖 𝛿 𝑖 (𝑥) 𝑐 𝑜,𝑖 𝛿𝑖 𝑥:جسم جلوی مانع داشتن نظر در برای انسداد به اطمینان میزان 𝑐 𝑝,𝑖 𝛿𝑖 (𝑥):داشتن نظر در برای حرکت محدودهمسیرهاییممکن فیزیکی نظر از که هستند 𝑐 𝑑,𝑖 𝛿𝑖 (𝑥):مدلاینرسیجسم 16
17.
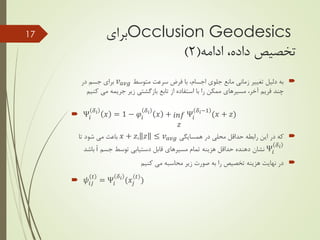
Occlusion Geodesicsبرای تخصیصادامه ،داده(2) متوسط
سرعت فرض با ،اجسام جلوی مانع زمانی تغییر دلیل به𝑣 𝑎𝑣𝑔در جسم برای کن می جریمه زیر بازگشتی تابع از استفاده با را ممکن مسیرهای ،آخر فریم چندیم Ψ𝑖 𝛿 𝑖 𝑥 = 1 − 𝜑𝑖 𝛿 𝑖 𝑥 + 𝑖𝑛𝑓 𝑧 Ψ𝑖 𝛿 𝑖−1 (𝑥 + 𝑧) همسایگی در محلی حداقل رابطه این در که𝑥 + 𝑧, 𝑧 ≤ 𝑣 𝑎𝑣𝑔تا شود می باعث Ψ𝑖 𝛿 𝑖 جسم توسط دستیابی قابل مسیرهای تمام هزینه حداقل دهنده نشانiباشد کنیم می محاسبه زیر صورت به را تخصیص هزینه نهایت در 𝜓𝑖𝑗 𝑡 = Ψ𝑖 𝛿 𝑖 (𝑥𝑗 𝑡 ) 17
18.
معیارهایاطمینان ترمانسداد𝑐 𝑜,𝑖 𝛿𝑖 𝑥شود می
تعریف زیر صورت به مقاله این در شده ارائه روش در 𝑐 𝑜,𝑖 𝛿𝑖 𝑥 = 1 𝑖𝑓 𝑥 ∈ 𝑃𝑠 ∪ 𝑃𝑑 𝑡 1 − 𝛽 𝛿𝑖 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒 𝛽 ∈ [0,1]:آشکارساز به اطمینان فاکتور 𝑃𝑠و𝑃𝑑 𝑡 :موانع توسط شده مسدود محوطهاستاتیکیا ودینامیک(دیگر اجسام) 𝑃𝑠به شده تعیین پیش از ماسک یک صورت به توان می راالگوریتمداد 𝑃𝑑 𝑡 آورد بدست زمین روی بر هدف حول مستطیل مرکز انعکاس از توان می را ترممسیرهاییشود می تعریف زیر صورت به هستند ممکن فیزیکی نظر از که 𝑐 𝑝,𝑖 𝛿𝑖 𝑥 = exp(− 𝑥− 𝑥 𝑖 2 2𝜎 𝑝 2 𝛿 𝑖 2 max 𝑑 𝑖 ,𝑣 𝑎𝑣𝑔 2) 𝜎 𝑝واریانس،حرکت𝑥𝑖و شده مسدود جسم موقعیت آخرین𝑑𝑖شده بینی پیش جهت جسمiاست 18
19.
ثابت موانع توسط
شده مسدود نواحی(𝑃𝑠)موانع یا ودینامیک(𝑃𝑑 𝑡 ) 19
20.
ادامه ،اطمینان معیارهای به
جسم تشخیص کردن محدود برایمسیرهاییه پذیر امکان فیزیکی نظر از کهاز ستند کنیم می استفاده زیر رابطه 𝑐 𝑝,𝑖 𝛿𝑖 𝑥 = −∞ 𝑖𝑓 𝑐 𝑝,𝑖 𝛿𝑖 𝑥 < 𝜏 𝑝 اطمینان معیاراینرسیآید می بدست زیر رابطه از نیز جسم 𝑐 𝑑,𝑖 𝛿𝑖 𝑥 = exp − 𝑑 𝑖,𝑑 𝑗 − 𝑑 𝑖 𝑑 𝑗 2 2𝜎 𝑑 2 𝑑 𝑖 2 𝑑 𝑗 2 𝑑𝑗 = 𝑥 − 𝑥𝑖 واریانسجهت𝜎 𝑑کرد استفاده ،جهت شدید تغییرات کردن جریمه برای توان می را 20
21.
پایان و اولیه
دهی مقدارالگوریتم از مسیرها حذف و ایجاد برایObject Detectorکنیم می استفاده گیرند می قرار تصویر های حاشیه در تصویر از خروج و ورود محلهای گیرد می صورت تصویر حاشیه در تشخیص توسط جدید مسیر ایجاد گیرد می صورت مشاهده قابل بازه از هدف شدن خارج صورت در مسیرها حذف 21
22.
تخصیص مساله حلآشکارسازیهامسیرها
به محافظه داده تخصیص از استفاده با ابتدا درکارانههستند مشاهده قابل راحتی به که اجسامی(قرمز و سبز مسیرهای)می ردیابیشوند. از استفاده با سپسOcclusion Geodesicsشده مسدود که جسمی(آبی مسیر)یابد می ادامه دوباره مشاهده هنگام در. 22
23.
مسیر کوتاهترین(قرمز)اطمی ضریب
بیشترین با مسیر مقابل دراساس بر نان شده تعریف اطمینان معیار(سبز) 23
24.
ارزیابی24
25.
ارزیابی 𝑣 𝑎𝑣𝑔 =
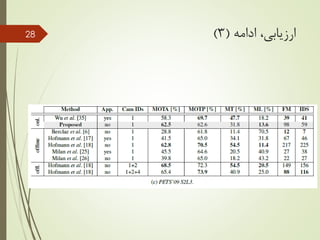
4.5𝑚/𝑠(دوچرخه و پیاده عابرین داشتن نظر در برایسوارها) 𝜏 𝑐 = 0.5𝑚(تصویر در متوالی فریم دو بین فاصله آستانه7ثانیه در فریم) 𝜎 𝑝 2 = 1 𝜎 𝑑 2 = 0.5 𝜏 𝑝 = 0.01 𝛽 = 0.9(بهترین از استفاده دلیل بهآشکارسازهایدنیا روز) داده دو روی بر نتایجPETS’09وTown Centre معیارهایCLEARشامل ،MOTAوMOTPمعیارهای ،MTوMLتعداد ، Fragmentها هویت تغییر و ها(IDS) 25
26.
ادامه ،ارزیابی26
27.
ادامه ،ارزیابی(2)27
28.
ادامه ،ارزیابی(3)28
29.
ادامه ،ارزیابی(4)29
30.
ادامه ،ارزیابی(5)30
31.
گیری نتیجه و
بحث31
32.
بحث است آنالین روشهای
دیگر از بهتر آمده بدست نتایج روشهای از بسیاری از حتی روش این عملکردآفالیناست بهتر نیز نتایج با مقایسه قابل نتایجهایپرگرافHofmann[1]بهترین که است همکارانش و روی بر حاضر حال تا موجود نتایجدادگانPETS’09است روشهای از آمده بدست نتایج به نزدیک ما نتایج بازدهی حتیآفالیندور چند بااست بین روش با مقایسه در که دهند می نشان نتایجهایپرگرافHofmannاستفاده دلیل به ، ازOcclusion Geodesicsهویت تغییر تعداد شده ارائه روش ،(IDS)بسیار کند می ایجاد را کمتری 32 1-Hofmann, M., Wolf, D., & Rigoll, G. (2013, June). Hypergraphs for joint multi-view reconstruction and multi-object tracking. In Computer Vision and Pattern Recognition (CVPR), 2013 IEEE Conference on (pp. 3650-3657). IEEE.
33.
ادامه ،گیری نتیجه
و بحث عملکرد سرعتالگوریتمروی بر ساده سازی پیاده باMATLABروی بر اجرا و با کامپیوتری3.4GHz Intel CPUبه11.2برای ثانیه در فریمدادگانPETS- S2L1و2.1برای ثانیه در فریمدادگانشلوغتریتا که38تصویر در همزمان هدف را بهتری سرعت موجود روشهای دیگر به نسبت که هستند مشاهده قابلداراست از استفاده با ردیابی برای روشی مقاله این درآشکارسازیچند ردیابی منظور بههدف ین شد ارائه همزمان طور به مکانی پیشرفت همانند هندسی های نشانه شده ارائه روش در-انسداد نواحی زمانیپیش ، شود می استفاده ساز آشکار به اطمینان میزان و تحرک بینی ط به انسداد از پس که اجسامی دوباره تخصیص توانایی شده ارائه روش نتیجه درور را کردند ظهور مجددداراست از استفاده باالگوریتمحتی ،کرد دنبال همزمان توان می را جسم چندین شده ارائهدر سناریوهایشلوغ 33
34.
ادامه ،گیری نتیجه
و بحث این نتایج مقایسه بررسیالگوریتمبهترین والگوریتمهایمی نشان دنیا روزحتی که دهد مق قابل آن نتایج اما ،کند می کار آنالین صورت به شده ارائه روش اینکه وجود بابا ایسه بهترینالگوریتمهایآفالیناست نتیجه درالگوریتموی اهمیت از آنها در زمان که کاربردهایی در توان می را شده ارائهژه کرد استفاده است برخوردار ای 34
35.
شما توجه از
تشکر با35
Download










![محافظه داده تخصیصکارانهادامه ،
بهینه تخصیص کردن پیدا برایآشکارسازیهامحافظه مسیرهای بهکارانهم این ،از قاله
الگوریتمHungarian[1]محاسبه برایماتریسکند می استفاده تخصیصهز تاینه
سازد حداقل را زیر کلی
𝐴∗ = 𝑎𝑟𝑔𝑚𝑖𝑛
𝐴
𝑖=1
𝑁 𝑂
𝑗=1
𝑁 𝐷
𝜓𝑖𝑗
𝑡
𝑎𝑖𝑗
𝑡
یاف آشکارساز توسط باشند نشده داده تشخیص مرحله این انتهای در که اجسامینشده ت
اند
،شوند پیدا دوباره شده گم اجسام که صورتی در نتیجه درآشکارسازیهایب آیندهبه اید
شوند داده تخصیص مسیرها این
از استفاده با بعدی بخش درGeodesicsپردازیم می مساله این حل به
14
1-Munkres, J. (1957). Algorithms for the assignment and
transportation problems.Journal of the Society for
Industrial and Applied Mathematics, 5(1), 32-38.](https://image.slidesharecdn.com/33aa730b-ed32-4868-9bbb-0ca51c6edce7-160722173216/85/Seminar-14-320.jpg)


![معیارهایاطمینان
ترمانسداد𝑐 𝑜,𝑖
𝛿𝑖
𝑥شود می تعریف زیر صورت به مقاله این در شده ارائه روش در
𝑐 𝑜,𝑖
𝛿𝑖
𝑥 =
1 𝑖𝑓 𝑥 ∈ 𝑃𝑠 ∪ 𝑃𝑑
𝑡
1 − 𝛽 𝛿𝑖 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
𝛽 ∈ [0,1]:آشکارساز به اطمینان فاکتور
𝑃𝑠و𝑃𝑑
𝑡
:موانع توسط شده مسدود محوطهاستاتیکیا ودینامیک(دیگر اجسام)
𝑃𝑠به شده تعیین پیش از ماسک یک صورت به توان می راالگوریتمداد
𝑃𝑑
𝑡
آورد بدست زمین روی بر هدف حول مستطیل مرکز انعکاس از توان می را
ترممسیرهاییشود می تعریف زیر صورت به هستند ممکن فیزیکی نظر از که
𝑐 𝑝,𝑖
𝛿𝑖
𝑥 = exp(−
𝑥− 𝑥 𝑖
2
2𝜎 𝑝
2 𝛿 𝑖
2 max 𝑑 𝑖 ,𝑣 𝑎𝑣𝑔
2)
𝜎 𝑝واریانس،حرکت𝑥𝑖و شده مسدود جسم موقعیت آخرین𝑑𝑖شده بینی پیش جهت
جسمiاست
18](https://image.slidesharecdn.com/33aa730b-ed32-4868-9bbb-0ca51c6edce7-160722173216/85/Seminar-18-320.jpg)












![بحث
است آنالین روشهای دیگر از بهتر آمده بدست نتایج
روشهای از بسیاری از حتی روش این عملکردآفالیناست بهتر نیز
نتایج با مقایسه قابل نتایجهایپرگرافHofmann[1]بهترین که است همکارانش و
روی بر حاضر حال تا موجود نتایجدادگانPETS’09است
روشهای از آمده بدست نتایج به نزدیک ما نتایج بازدهی حتیآفالیندور چند بااست بین
روش با مقایسه در که دهند می نشان نتایجهایپرگرافHofmannاستفاده دلیل به ،
ازOcclusion Geodesicsهویت تغییر تعداد شده ارائه روش ،(IDS)بسیار
کند می ایجاد را کمتری
32
1-Hofmann, M., Wolf, D., & Rigoll, G. (2013, June). Hypergraphs
for joint multi-view reconstruction and multi-object tracking.
In Computer Vision and Pattern Recognition (CVPR), 2013 IEEE
Conference on (pp. 3650-3657). IEEE.](https://image.slidesharecdn.com/33aa730b-ed32-4868-9bbb-0ca51c6edce7-160722173216/85/Seminar-32-320.jpg)











![poroje pish bini bar dar sistem haie enerzhi - [www.wikipower.ir].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/porojepishbinibardarsistemhaieenerzhi-www-250629090413-f4f1ae7a-thumbnail.jpg?width=640&height=640&fit=bounds)