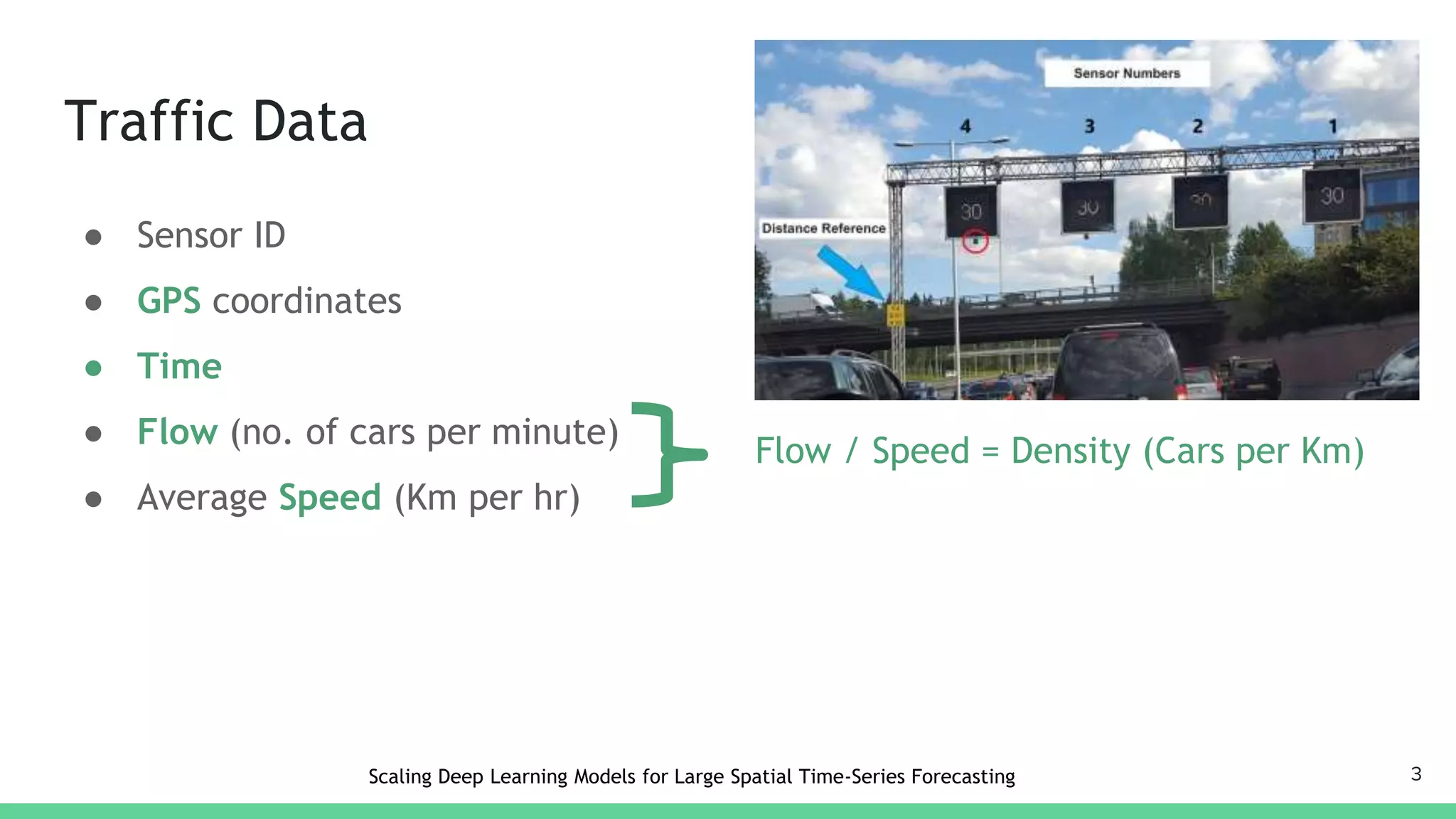
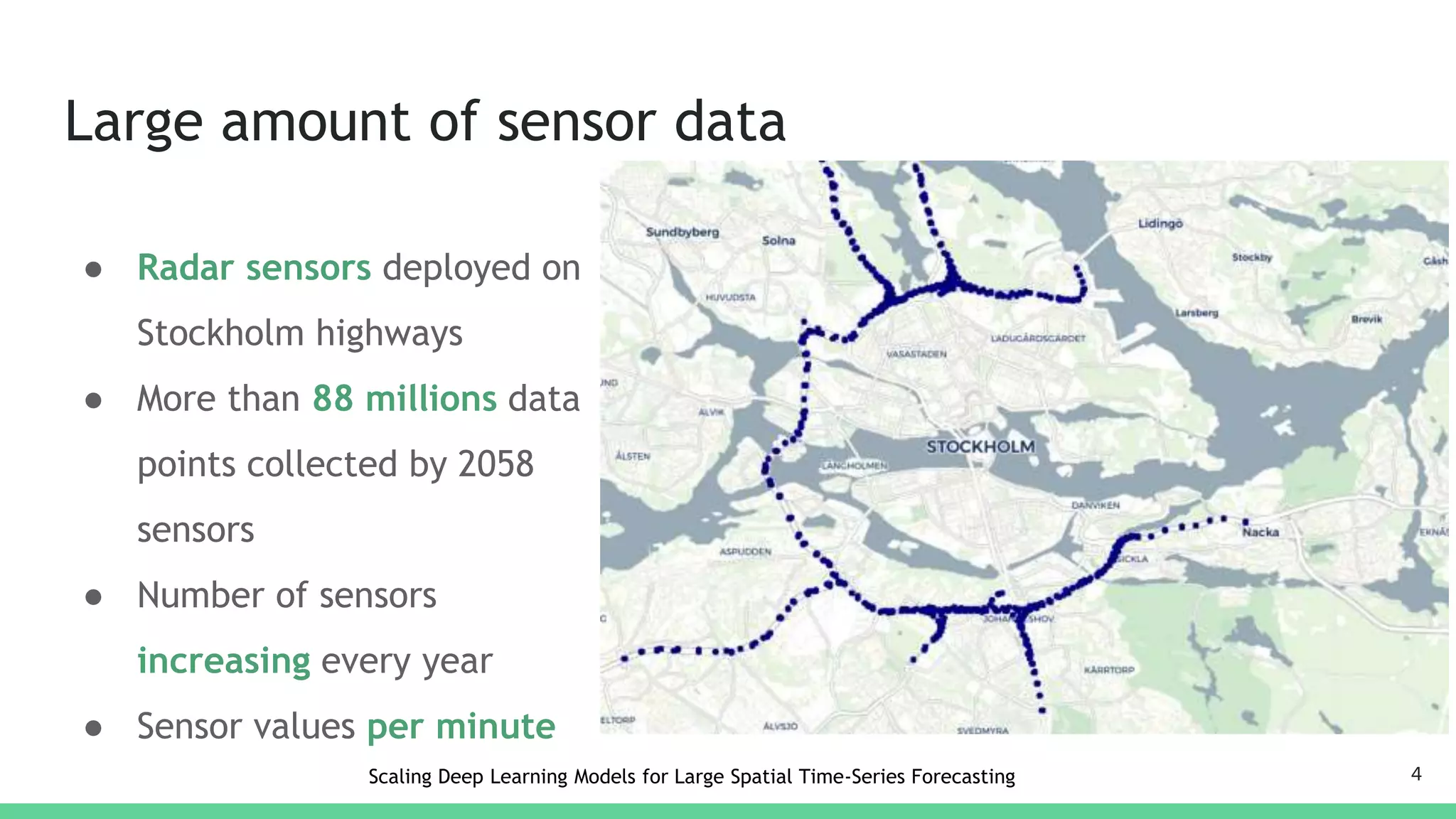
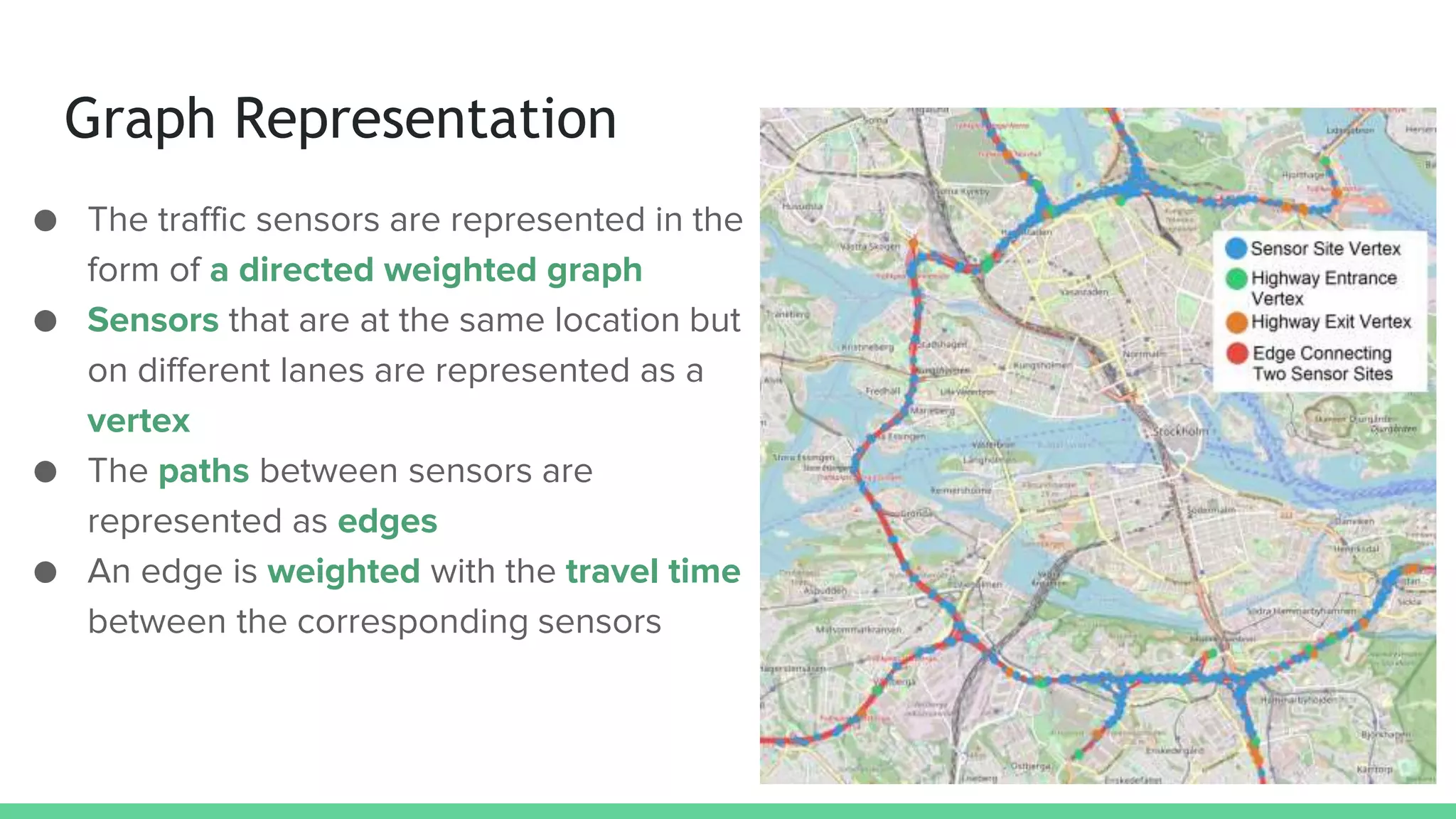
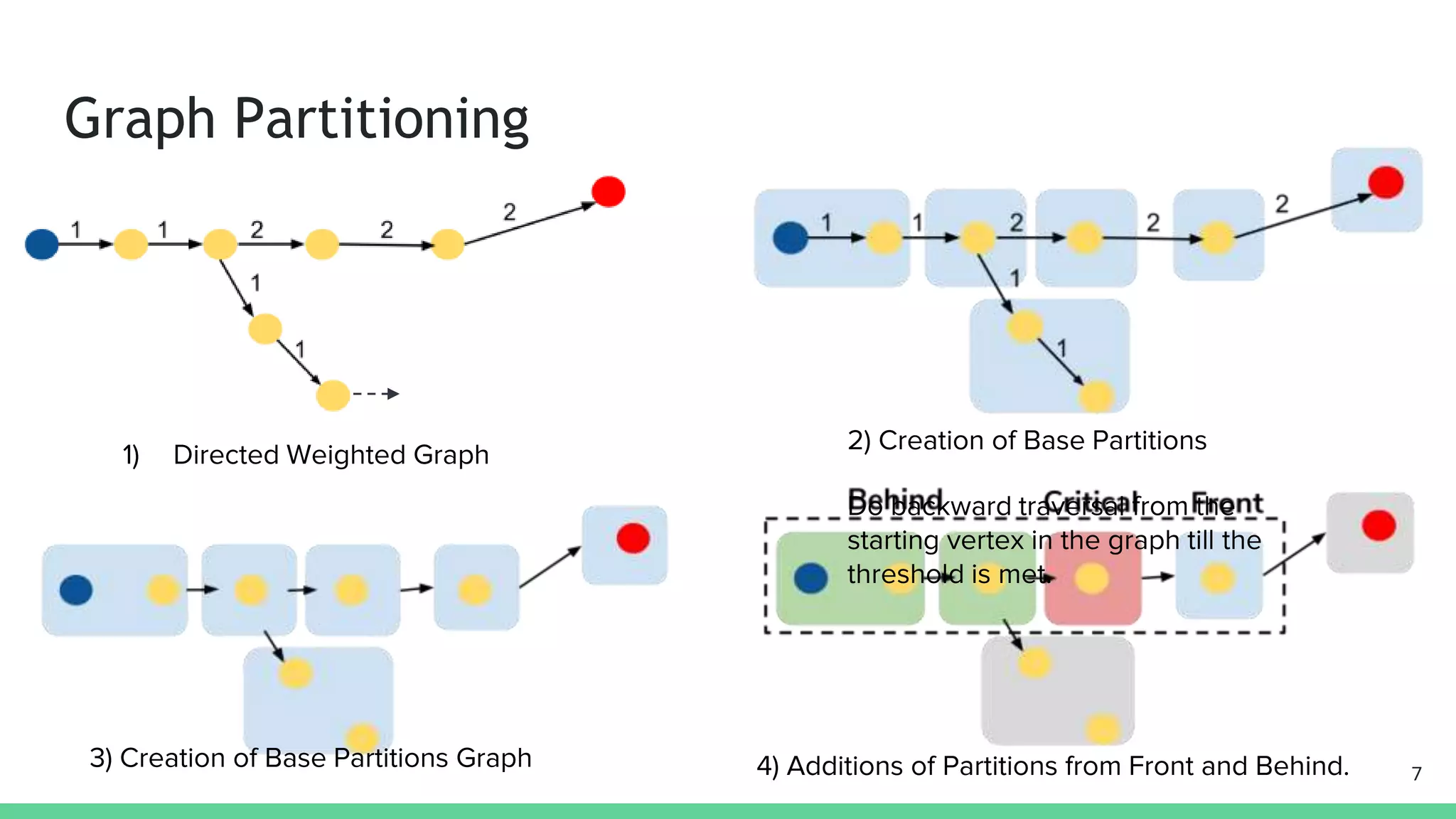
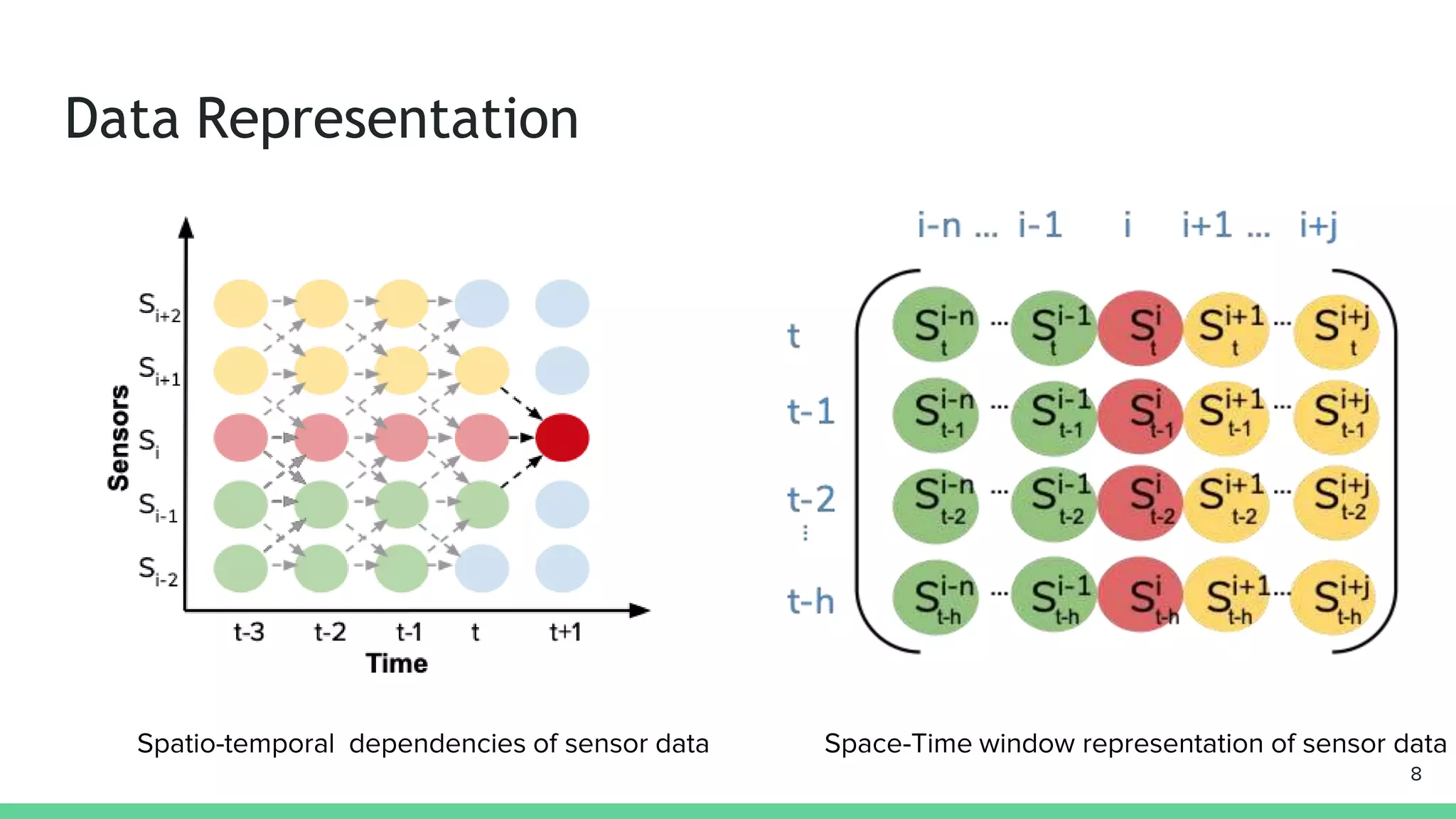
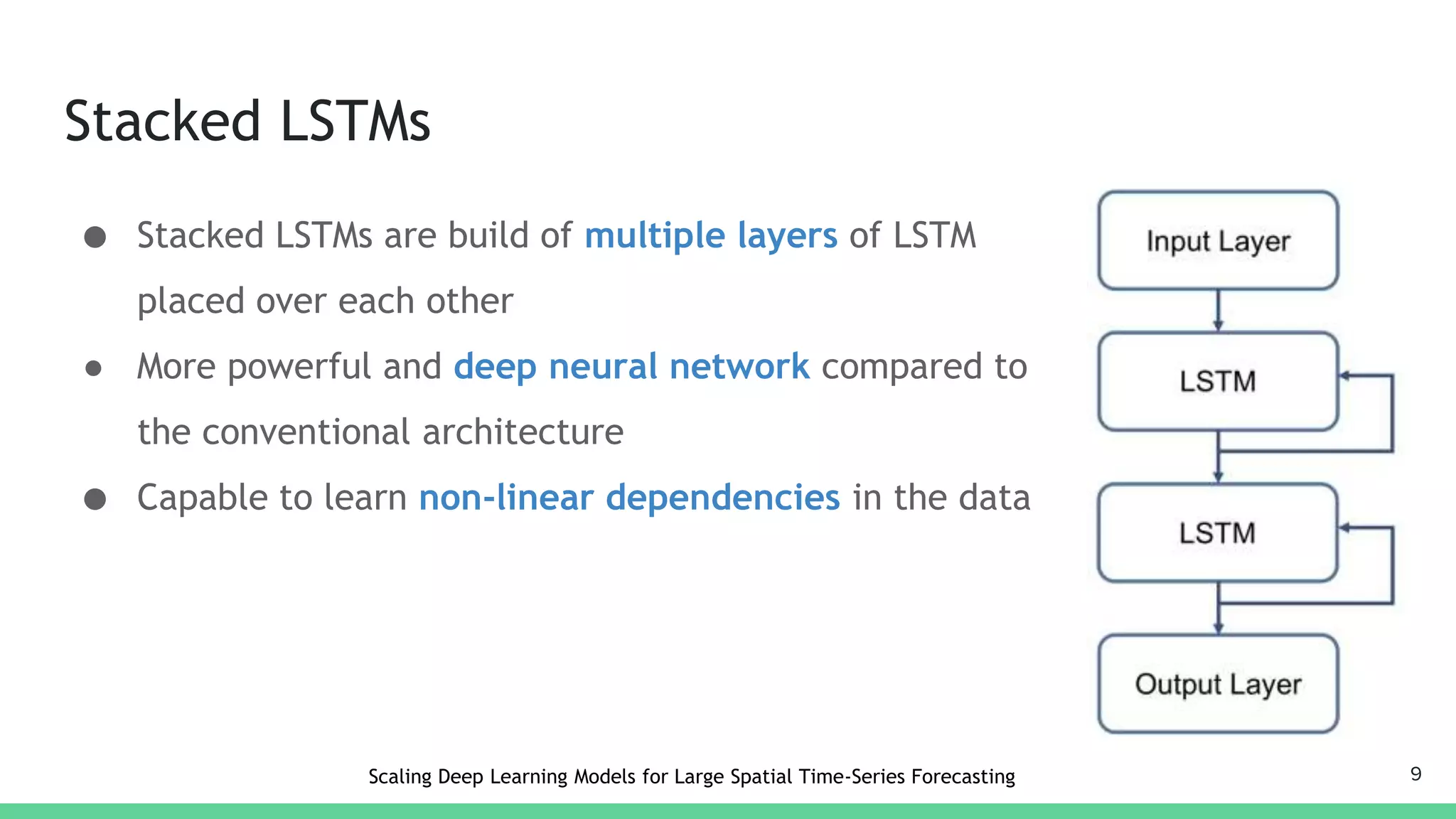
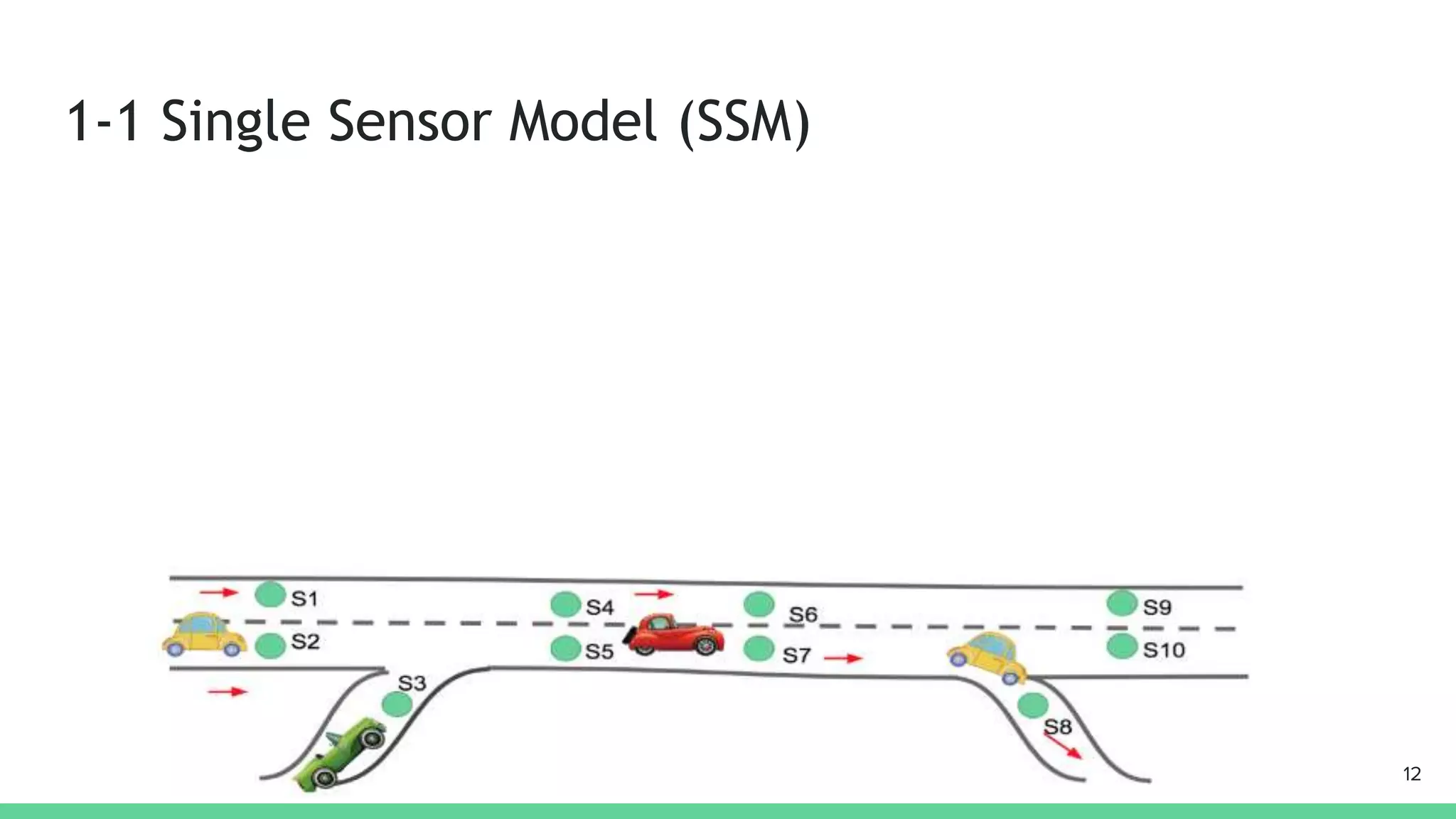
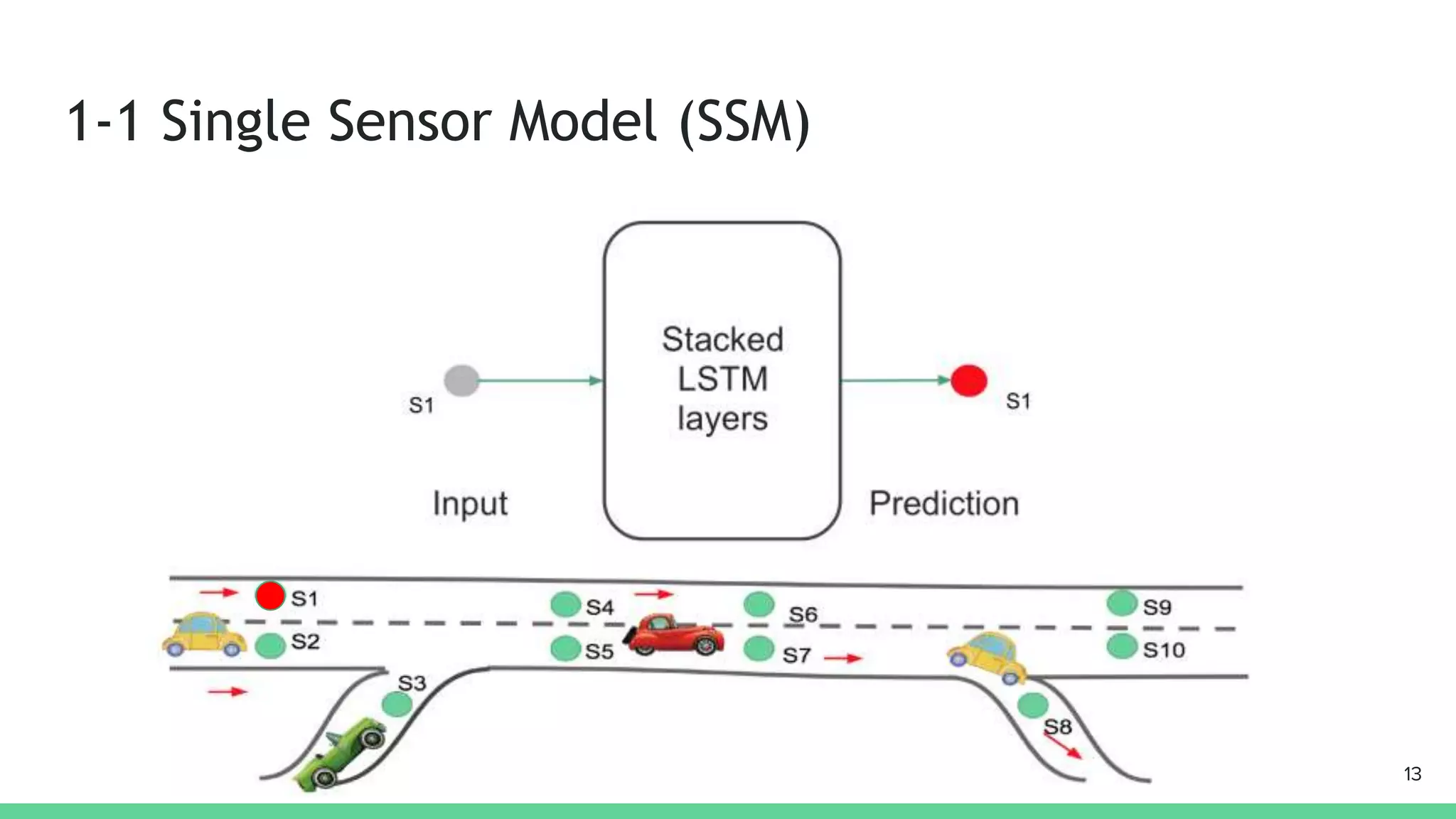
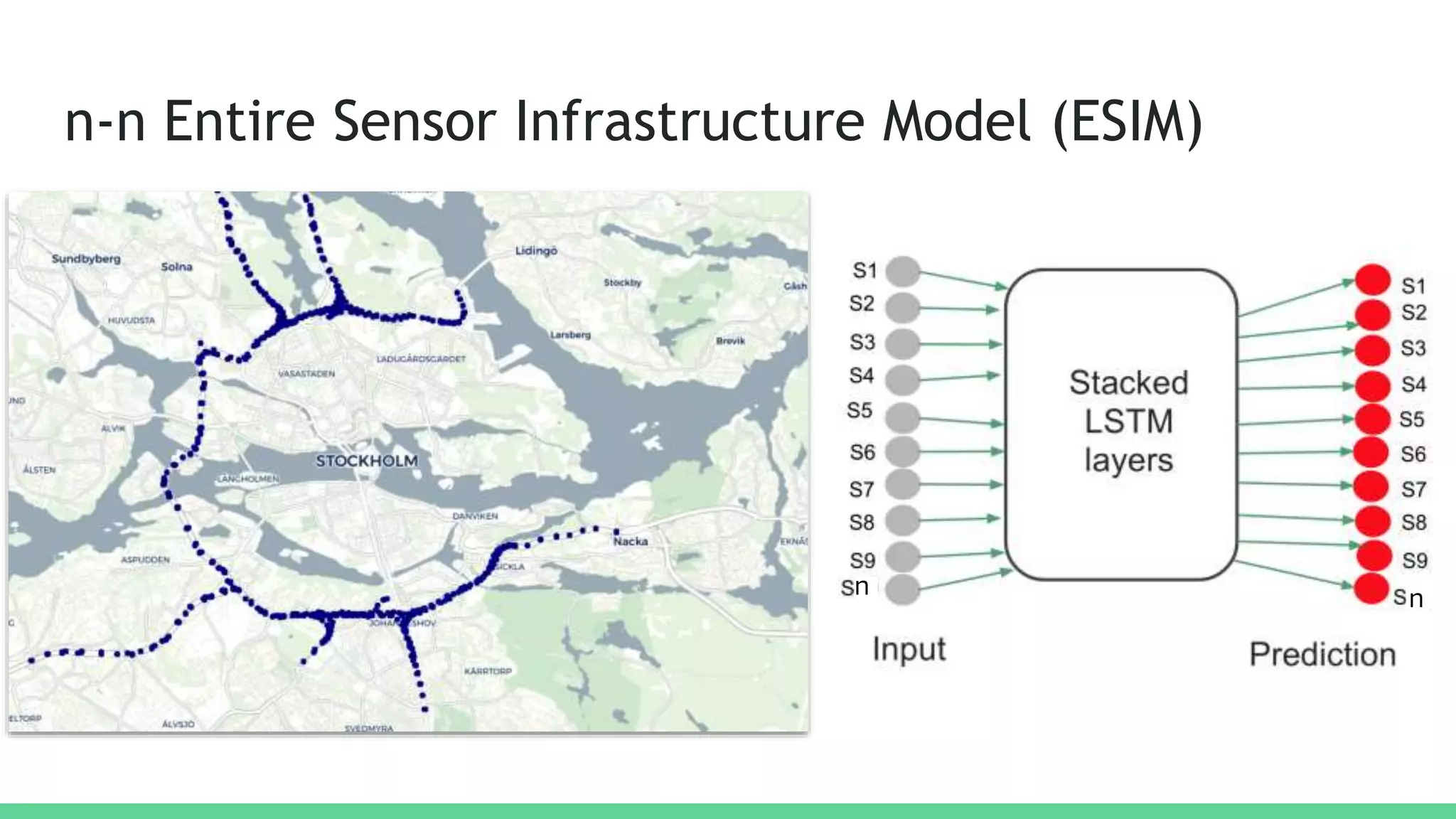
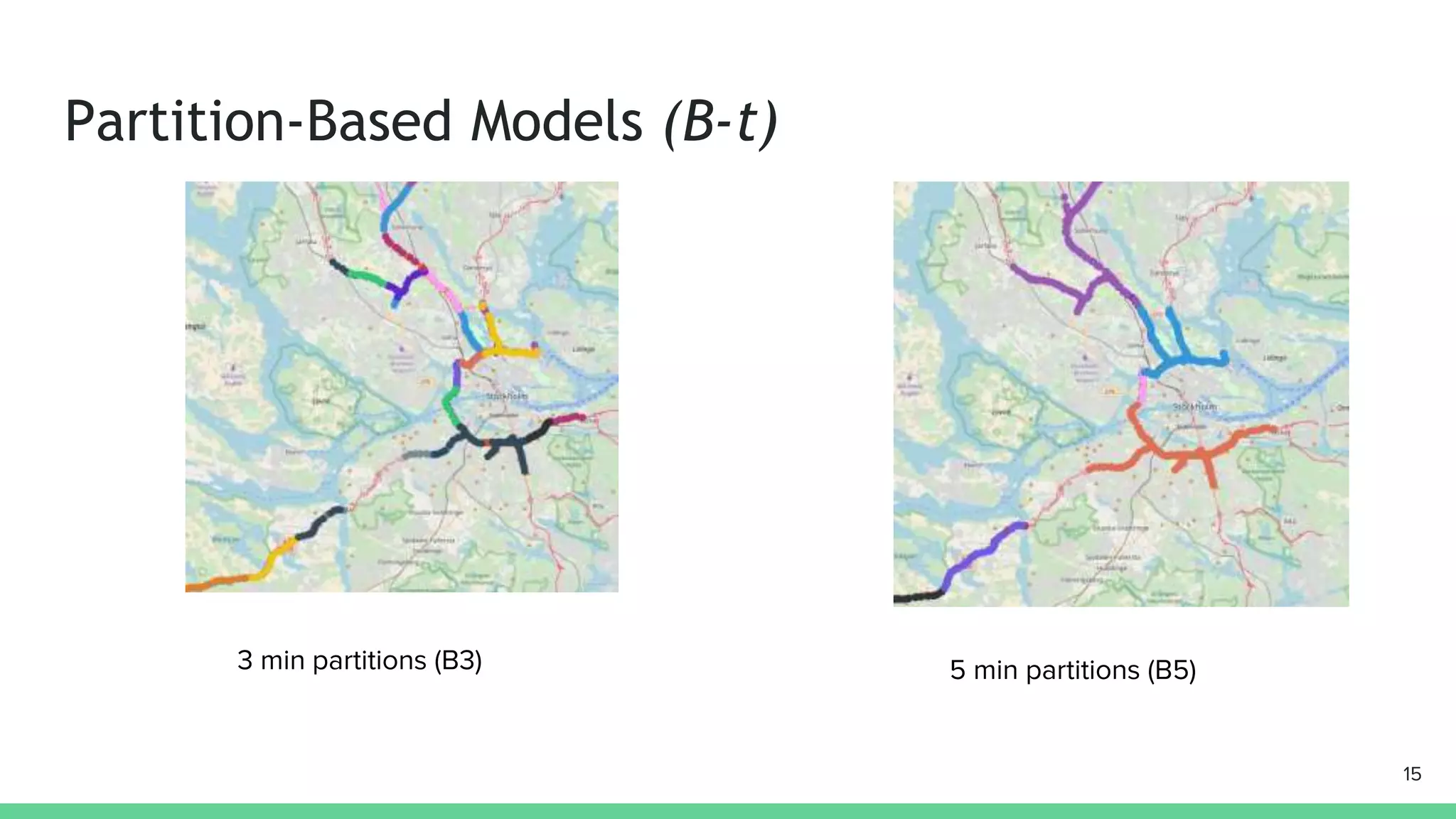
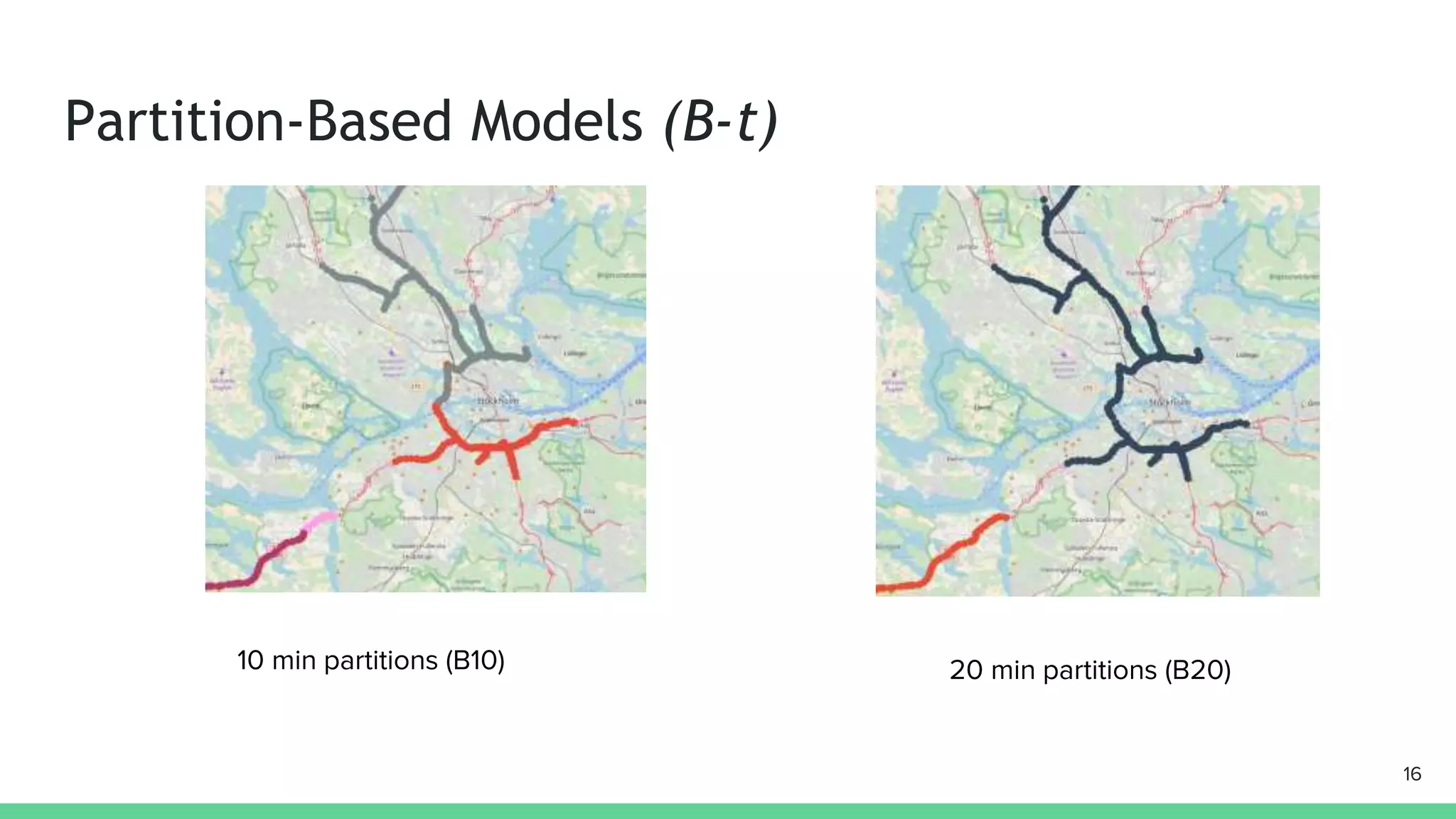
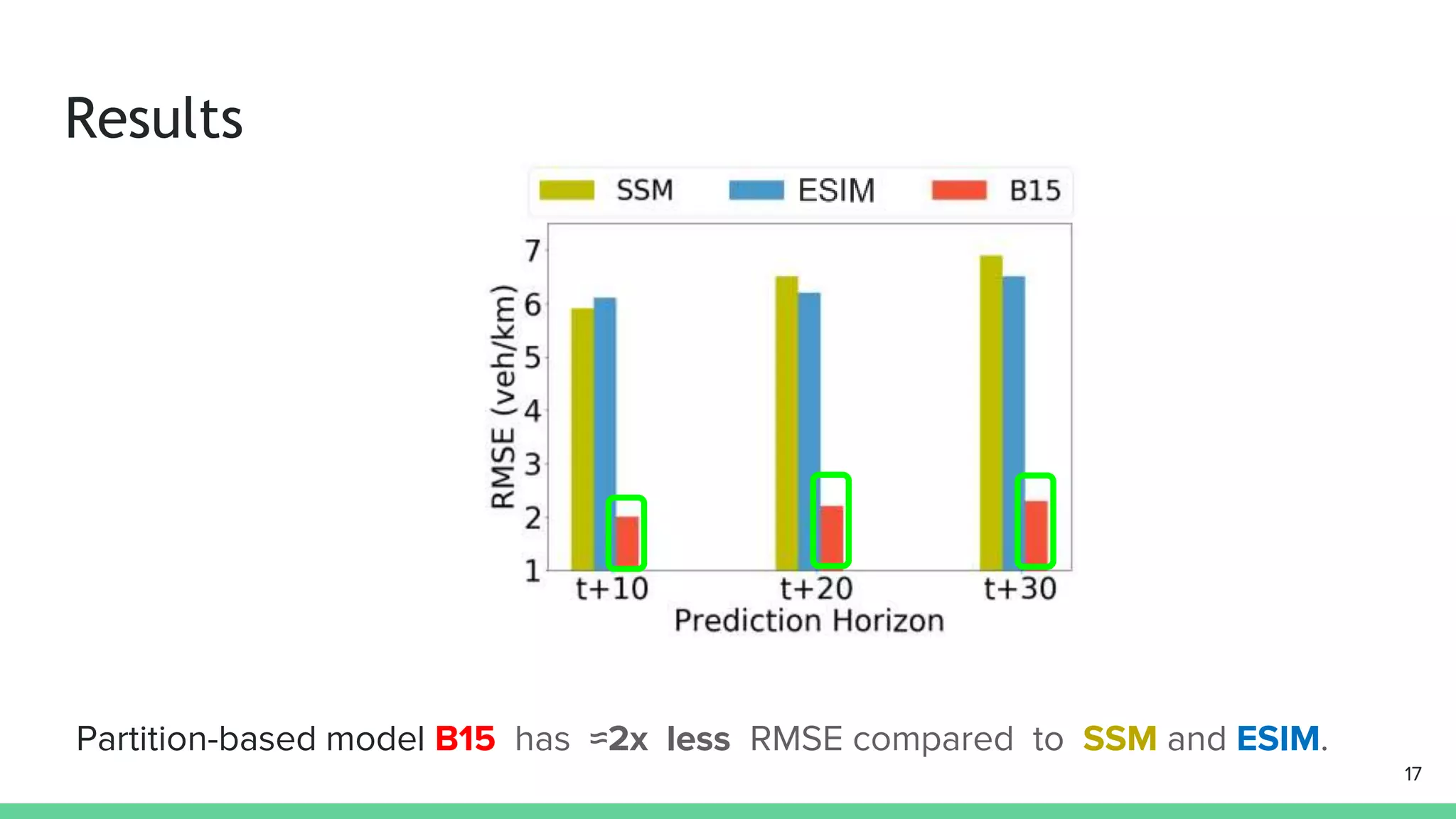
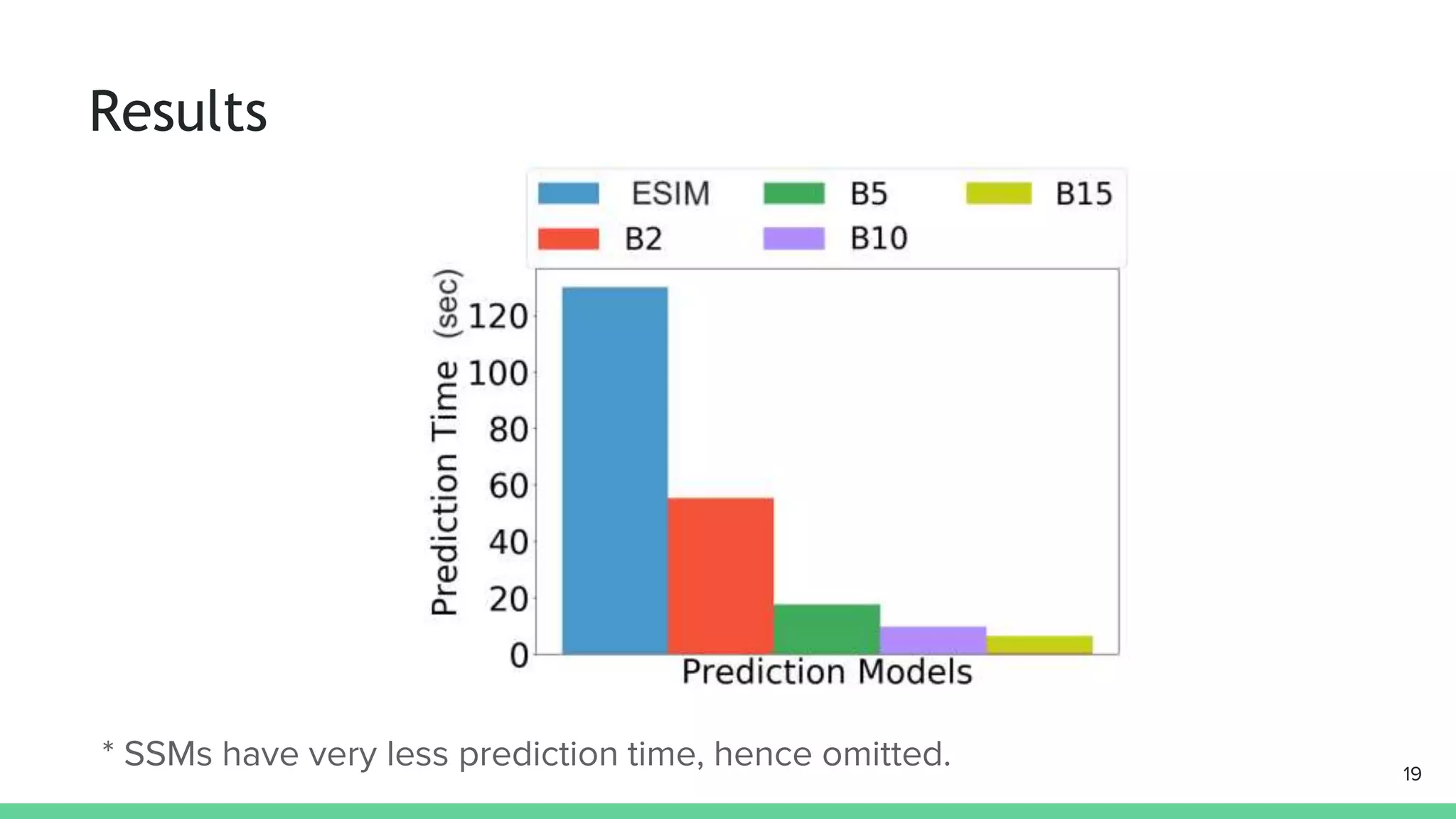
The document discusses challenges in scaling deep learning models for spatial time-series forecasting, specifically emphasizing the computational intensity of training deep neural networks. It proposes partitioning and distribution as effective strategies for managing large datasets from traffic sensors, including the creation of directed weighted graphs for data representation. Key research questions include how to partition data while preserving dependencies and optimizing forecast accuracy, with results showing that partition-based models significantly reduce prediction errors compared to single sensor models.

























![[20240628_LabSeminar_Huy]ScalableSTGNN.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/20240628labseminarhuyscalablestgnn-240628124039-93589631-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240422_LabSeminar_Huy]Taming_Effect.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/20240422labseminarhuytamingeffect-240423153149-d879b2ce-thumbnail.jpg?width=640&height=640&fit=bounds)




![[20240520_LabSeminar_Huy]DSTAGNN: Dynamic Spatial-Temporal Aware Graph Neural...](https://cdn.slidesharecdn.com/ss_thumbnails/20240520labseminarhuydstagnn-240520123156-67d80b3a-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Seminar] hyunwook 0624](https://cdn.slidesharecdn.com/ss_thumbnails/seminarhyunwook0624-200725001151-thumbnail.jpg?width=640&height=640&fit=bounds)



![[20240805_LabSeminar_Huy]GPT-ST: Generative Pre-Training of Spatio-Temporal G...](https://cdn.slidesharecdn.com/ss_thumbnails/20240805labseminarhuygpt-st-240806102941-cd305d0d-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240325_LabSeminar_Huy]Spatial-Temporal Fusion Graph Neural Networks for Tr...](https://cdn.slidesharecdn.com/ss_thumbnails/20240325labseminarhuystfgnn-240409103218-8b4b7f23-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DSC Europe 25] Debmalya Biswas - Agentification: the art of transforming man...](https://cdn.slidesharecdn.com/ss_thumbnails/r5azlggvtqiaiiusrqdr-4-251212103249-5a12c89b-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Jon Dajci - Bridging TradFi and DeFi: Building the Future of ...](https://cdn.slidesharecdn.com/ss_thumbnails/fqmhfvlbqhkihjvqvhmu-7-251211083849-6af7e325-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Dunja Adzic Jovanovic - AI and Cybersecurity: Defending Data ...](https://cdn.slidesharecdn.com/ss_thumbnails/o1zylpbhrtwnixxq2xj8-7-251211083048-185086f6-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Jovan Bogicevic - Legacy to AI-Driven Defense: Transforming D...](https://cdn.slidesharecdn.com/ss_thumbnails/rsarluadt563hntyfc8q-3-251211083849-3e7bc4c0-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Dusan Nesic - Securing Tomorrow’s Infrastructure: Why Cyber-P...](https://cdn.slidesharecdn.com/ss_thumbnails/qikbszfftyowjm2q6duw-1-251211083848-8f2ead6b-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Tatevik Maytesyan - How to actually use AI in marketing: gett...](https://cdn.slidesharecdn.com/ss_thumbnails/tjo626lsqdgfntbgl2mw-4-251216103155-e36cd239-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Behzad Hosseini - AI Agents in the Wild: Deploying Models tha...](https://cdn.slidesharecdn.com/ss_thumbnails/3qtejajvsjqrzwfept2c-10-251212103250-7f2b1068-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Ivan Peric - Intelligence Swarm Logic and Techno-Functional M...](https://cdn.slidesharecdn.com/ss_thumbnails/7my7c97fsduiccadgavw-2-251212103249-5a03f7c6-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Katherine Forrest - AI NOW: Understanding the Velocity of Cha...](https://cdn.slidesharecdn.com/ss_thumbnails/wvvbruqfrci0sfq9xwgb-4-251212104007-e5ad1987-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Kaja Kandare - LLM as a judge.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/arxyccaxsdsd1ba99wjw-7-251212104007-2b4e3f64-thumbnail.jpg?width=640&height=640&fit=bounds)