More Related Content

PDF

PDF
Jetson活用セミナー ROS2自律走行実現に向けて 
PDF
メルペイの与信モデリングにおける特徴量の品質向上の施策 
PPTX
【DL輪読会】WIRE: Wavelet Implicit Neural Representations 
PDF
Cartographer を用いた 3D SLAM ![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜 
PDF

PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発 What's hot

PDF
Minecraft による強化学習の実践 (MineRL) 
PDF
コンピュータビジョンの最新ソフトウェア開発環境 SSII2015 チュートリアル hayashi 
KEY

PDF
Cartographer と Autoware を用いた自律走行 
PDF
SQLアンチパターン 幻の第26章「とりあえず削除フラグ」 
PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日 
PPTX
大量時空間データの処理 ~ 現状の課題と今後OSSが解決すべきこと。(Open Source Conference 2021 Online/Osaka講演資料) 
PDF
Linked Open Data(LOD)の基本的な使い方 
ODP

PDF

PDF
Marp for VS Code で作る PowerPoint スライド 
PDF
ロボット・ソフトウェア開発環境ROSとは何か? (in Japanese) 
PDF
Always on 可用性グループ 構築時のポイント 
PDF

PDF
Visual-SLAM技術を利用した�果樹園の3次元圃場地図の作成 
PPTX
ストリーム処理におけるApache Avroの活用について(NTTデータ テクノロジーカンファレンス 2019 講演資料、2019/09/05) 
KEY

PDF
OPC UAをオープンソースやフリーのソフトで遊んでみた 
PDF
Airflowを広告データのワークフローエンジンとして運用してみた話 
PPTX
3次元SLAMは誰でもできるよ。そう、TX2とTurtleBot3ならね。 Similar to ROS.js の紹介

PDF

PDF

PDF

PDF
ROS JAPAN Users Group Meetup 03 
PDF
ロボット管理プラットフォーム「 RoboticBase 」の紹介 
PPTX

PPTX

PPTX

PDF

PDF
ROS JAPAN Users Group Meetup 01 
PDF

PDF

PDF

PPTX
ロボットシステムのつくりかた 〜Robot Operating Systemというアプローチ〜 
PDF

PPTX
第32回信号処理シンポジウム「Raspberry PiとROSを�使ったロボットシステム」 
PPTX
ROS Gazebo unityを使ったロボット開発入門( Japanese ) More from Honma Masashi

PDF
サポートエンジニアから見た Rancher 運用の現場 20250829 RancherJP 
PDF
Fxos for Embedded Systems (English version) 
PDF
Firefox OS for Embedded System 
PDF
Photo hack day Japan 2014 プレゼン資料 
PDF

PDF
Firefox OS を使って HTML5 でハードウェアを動かしてみよう 
PDF
Designers hack 011 ウォシュレットのリモコンから UI を極力無くすには 
PDF
次世代プラットフォームでのHTML5アプリ開発 Firefox OS/Ubuntu Touch 
PDF

PDF

PDF

PDF

PDF
デザイナー目線で Firefox OS を変えよう 
PDF
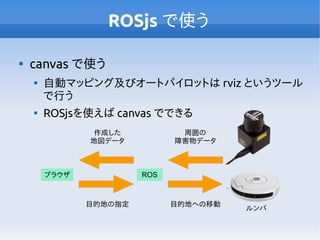
ROS.js の紹介
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
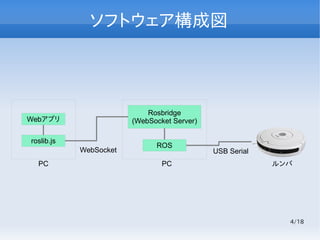
Rosbridge とは
ROS をJavaScript から使用できるようにするパッ
ケージ
WebSocket サーバー機能を持つ
ユーザーは JavaScript で WebSocket サーバに接続
し、ロボットにコマンドを送る
ROS を使うには C++ を書く必要があったが JavaScript
で書けるので Web 開発者にやさしい
- 7.
- 8.
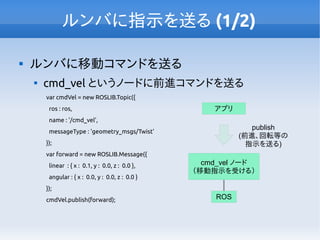
ルンバに指示を送る (1/2)
ルンバに移動コマンドを送る
cmd_vel というノードに前進コマンドを送る
varcmdVel = new ROSLIB.Topic({
ros : ros,
name : '/cmd_vel',
messageType : 'geometry_msgs/Twist'
});
var forward = new ROSLIB.Message({
linear : { x : 0.1, y : 0.0, z : 0.0 },
angular : { x : 0.0, y : 0.0, z : 0.0 }
});
cmdVel.publish(forward); ROS
アプリ
cmd_vel ノード
(移動指示を受ける)
publish
(前進、回転等の
指示を送る)
- 9.
- 10.
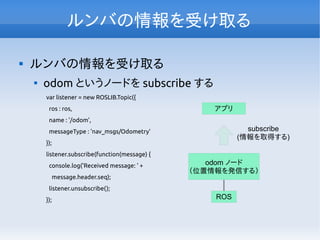
ルンバの情報を受け取る
ルンバの情報を受け取る
odom というノードを subscribeする
var listener = new ROSLIB.Topic({
ros : ros,
name : '/odom',
messageType : 'nav_msgs/Odometry'
});
listener.subscribe(function(message) {
console.log('Received message: ' +
message.header.seq);
listener.unsubscribe();
}); ROS
アプリ
odom ノード
(位置情報を発信する)
subscribe
(情報を取得する)
- 11.
- 12.
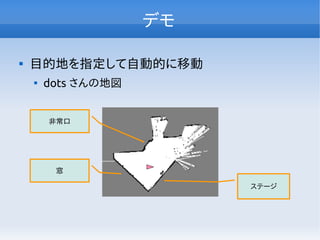
SLAM
Simultaneous Localization andMapping
自動的に地図を作成する & 自分の現在位置を推定す
る
指示した場所にロボットを移動できる
ROS を使えば SLAM ができる
SLAM に必要なもの
目隠しをされた状態で「ここはどこでしょう?」って言われ
たら? → とりあえず手探りで周囲の状況を探ろうとする
手探りをするためのデバイス
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.