Recommended
PDF
Windows ストアアプリから使かえるセンサーAPIとデバイスAPI
PPTX
HTML5 クロスプラットフォームアプリ開発の現実解
PPTX
PDF
PPTX
Cordovaの最近ホットな話題と地雷をまとめて紹介
PDF
その Web サイト、その Web アプリを最新の IE11 に対応しよう
PDF
PDF
PDF
PPTX
ハイブリッドアプリ開発最前線から見たHtml5の理想と現実
PPTX
PDF
モバイルHTML5サイトでの写真アップロードの最適化と業務アプリへの適用
PDF
Microsoft Edge 最新アップデートとこれから
PDF
オフラインWebアプリの再到来で今、再び注目されるAPIの本命 ーJavaScript SQL-like database
PPTX
PDF
~新しい着回しと出会おう~ 『XZ(クローゼット)』 を支える技術 -Cordova編-
PDF
Azure Static Web Apps を試してみた!
PDF
Androidハイブリッドアプリを約2年間メンテンナンスしてきて分ったこと
PDF
PPTX
Monacaで簡単スマートフォンアプリ開発体験講座
PPTX
PDF
PPTX
Sf素人が2週間でアプリケーションビルダーに挑戦してみた
PDF
オープンソースで始めるオフラインアプリケーション開発入門
KEY
中規模Androidアプリ開発の過程に生じた問題と対策の紹介
PDF
120分聞けばドヤ顔で語れる apache cordova スーパー勉強会
PDF
Visual Studio を使用した Cordova 開発
PDF
PDF
20141030 html5j-firefox os-deviceapi
PDF
More Related Content
PDF
Windows ストアアプリから使かえるセンサーAPIとデバイスAPI
PPTX
HTML5 クロスプラットフォームアプリ開発の現実解
PPTX
PDF
PPTX
Cordovaの最近ホットな話題と地雷をまとめて紹介
PDF
その Web サイト、その Web アプリを最新の IE11 に対応しよう
PDF
PDF
What's hot
PDF
PPTX
ハイブリッドアプリ開発最前線から見たHtml5の理想と現実
PPTX
PDF
モバイルHTML5サイトでの写真アップロードの最適化と業務アプリへの適用
PDF
Microsoft Edge 最新アップデートとこれから
PDF
オフラインWebアプリの再到来で今、再び注目されるAPIの本命 ーJavaScript SQL-like database
PPTX
PDF
~新しい着回しと出会おう~ 『XZ(クローゼット)』 を支える技術 -Cordova編-
PDF
Azure Static Web Apps を試してみた!
PDF
Androidハイブリッドアプリを約2年間メンテンナンスしてきて分ったこと
PDF
PPTX
Monacaで簡単スマートフォンアプリ開発体験講座
PPTX
PDF
PPTX
Sf素人が2週間でアプリケーションビルダーに挑戦してみた
PDF
オープンソースで始めるオフラインアプリケーション開発入門
KEY
中規模Androidアプリ開発の過程に生じた問題と対策の紹介
PDF
120分聞けばドヤ顔で語れる apache cordova スーパー勉強会
PDF
Visual Studio を使用した Cordova 開発
PDF
Viewers also liked
PDF
20141030 html5j-firefox os-deviceapi
PDF
PDF
PDF
Firefox OS を使って HTML5 でハードウェアを動かしてみよう
PDF
PDF
PDF
Chrome Packaged Apps」の作り方を学んでみた その1 ~ Chrome Packaged Appsって何ができるの? ~
PPTX
PPTX
PDF
車載組込ブラウザの過去7年と今を40分でまとめてみる
PDF
Python, RaspberryPi, Arduinoで作る消費電力モニタリングシステム
PPT
PPTX
Povezovanje kemijske panoge in delo z mladimi, KOCKE, Ziga Lampe, Drzava za g...
PDF
Márkaépítés a fogyasztói kontroll korában 2.0
PPTX
Coverage report for press event Atmel Maker Faire Shenzhen July 2015
PPT
PPTX
PDF
Conto+termico ordingroma 4_6+feb+2015 (2)
PPTX
Subsidio i.1 demanda actual
Similar to HTML5 によるロボット制御
PPTX
Web エンジニアのための�Web エンジニアのための�ロボットアームの API を考えてみる
PDF
PDF
PDF
PPTX
PDF
PPTX
PDF
PPTX
Raspberry pi+mono を使ってlegoを制御
PPTX
PDF
Firefox OS - Blaze Your Own Path
PPTX
PDF
Firefox OS for Embedded System
KEY
PDF
Embedded Webで加速するWeb of Things
PPTX
PDF
Leading the way to W3C TPAC 2015 『HTML5 関連の API の現状とこれから』
PPTX
ブラウザからWeb OSへ〜Web - TV連携事例からその可能性を探る〜
PDF
PDF
Web is the OS (Firefox OS)
More from Honma Masashi
PDF
サポートエンジニアから見た Rancher 運用の現場 20250829 RancherJP
PDF
Fxos for Embedded Systems (English version)
PDF
Photo hack day Japan 2014 プレゼン資料
PDF
PDF
Designers hack 011 ウォシュレットのリモコンから UI を極力無くすには
PDF
次世代プラットフォームでのHTML5アプリ開発 Firefox OS/Ubuntu Touch
PDF
PDF
PDF
PDF
PDF
デザイナー目線で Firefox OS を変えよう
PDF
Recently uploaded
PDF
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
PDF
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
PDF
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
PPTX
PDF
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
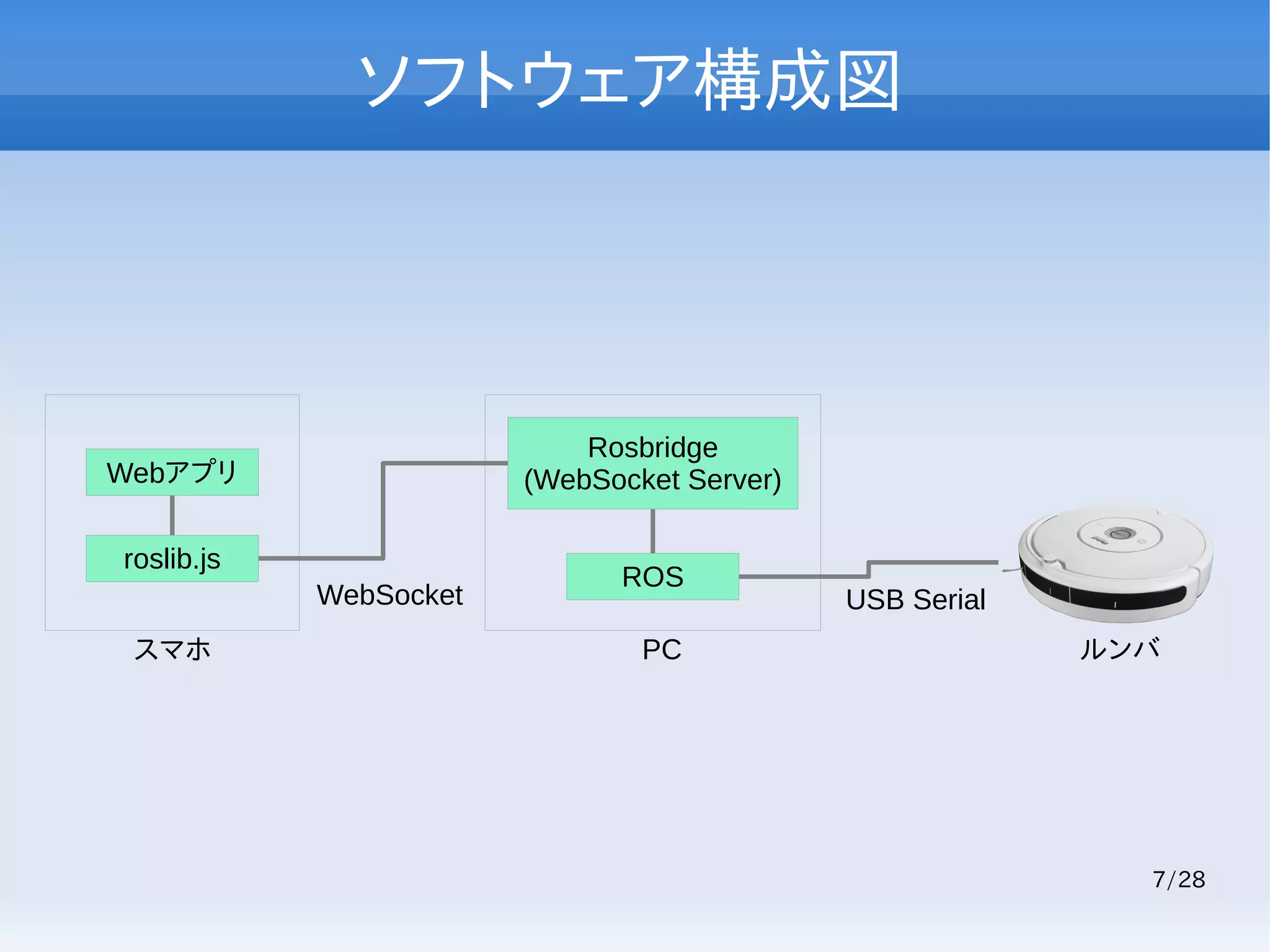
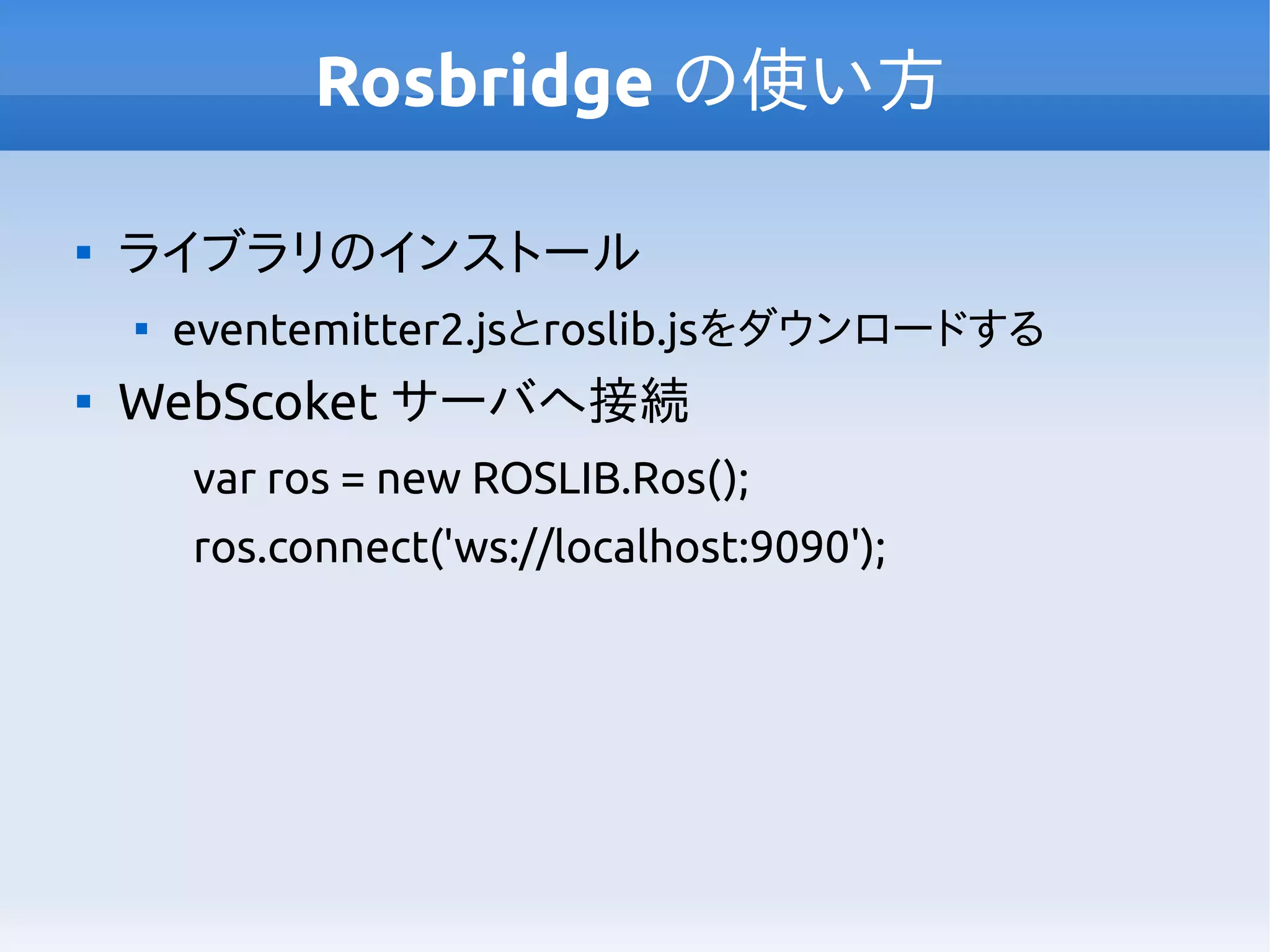
HTML5 によるロボット制御 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Rosbridge とは
ROS を JavaScript から使用できるようにするパッ
ケージ
WebSocket サーバー機能を持つ
ユーザーは JavaScript で WebSocket サーバに接続
し、ロボットにコマンドを送る
ROS を使うには C++ を書く必要があったが JavaScript
で書けるので Web 開発者にやさしい
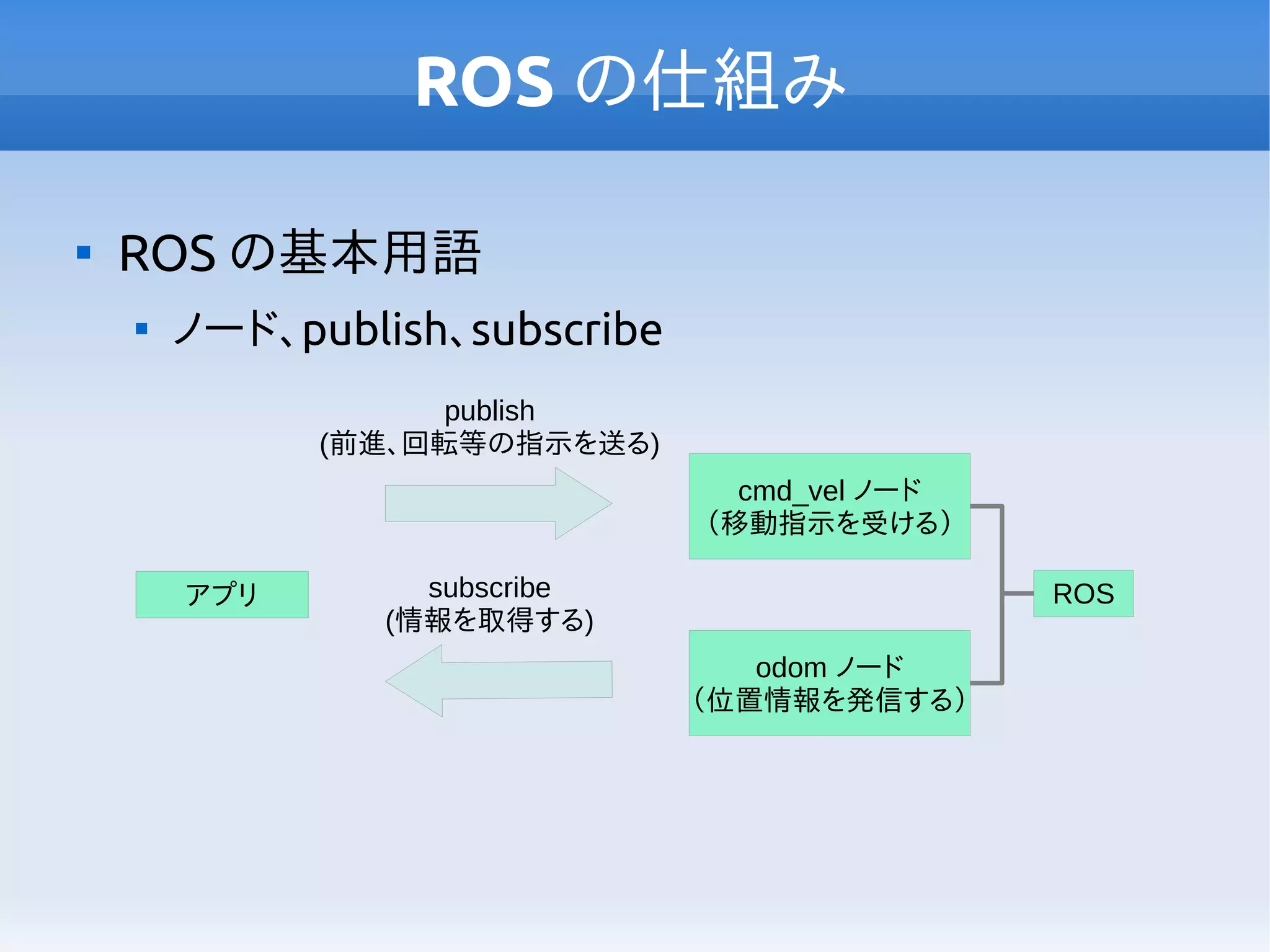
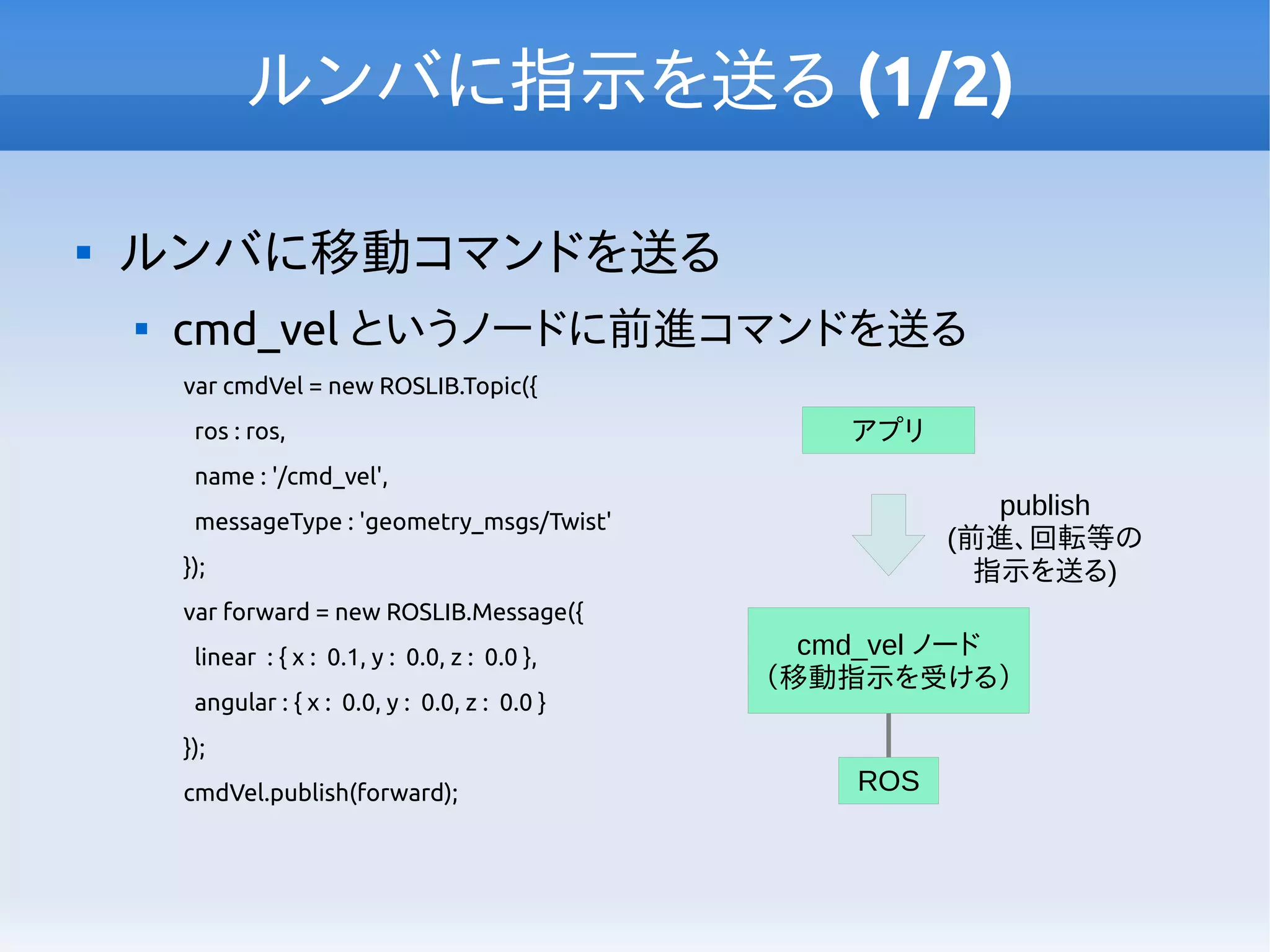
11. 12. ルンバに指示を送る (1/2)
ルンバに移動コマンドを送る
cmd_vel というノードに前進コマンドを送る
var cmdVel = new ROSLIB.Topic({
ros : ros,
name : '/cmd_vel',
messageType : 'geometry_msgs/Twist'
});
var forward = new ROSLIB.Message({
linear : { x : 0.1, y : 0.0, z : 0.0 },
angular : { x : 0.0, y : 0.0, z : 0.0 }
});
cmdVel.publish(forward); ROS
アプリ
cmd_vel ノード
(移動指示を受ける)
publish
(前進、回転等の
指示を送る)
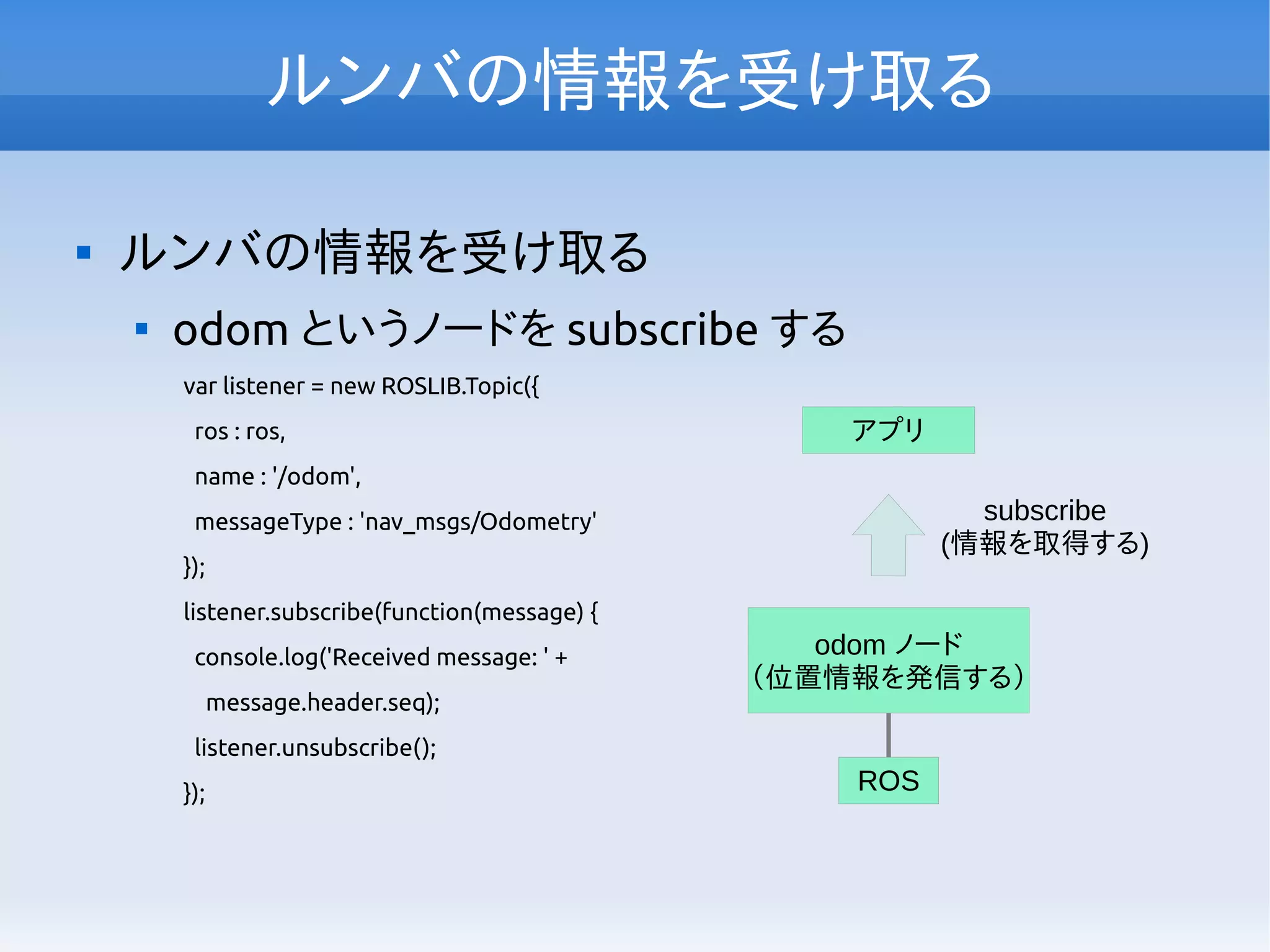
13. 14. ルンバの情報を受け取る
ルンバの情報を受け取る
odom というノードを subscribe する
var listener = new ROSLIB.Topic({
ros : ros,
name : '/odom',
messageType : 'nav_msgs/Odometry'
});
listener.subscribe(function(message) {
console.log('Received message: ' +
message.header.seq);
listener.unsubscribe();
}); ROS
アプリ
odom ノード
(位置情報を発信する)
subscribe
(情報を取得する)
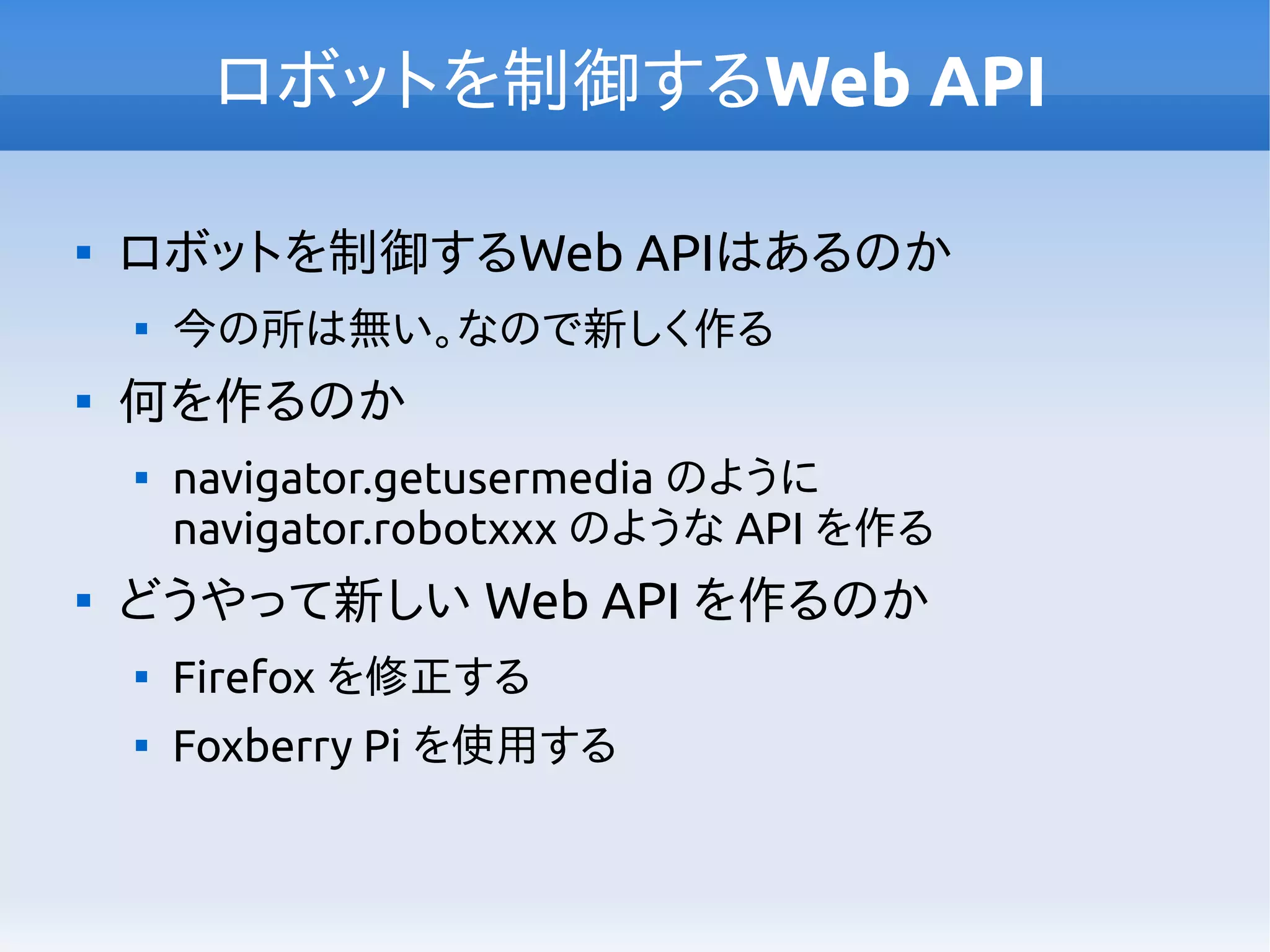
15. 16. Web API とは
二種類のWeb API
Web 上のサービスとして提供
Twitter API、Youtube API、...
ブラウザ上のJavaScript API (今日扱うのはこちら)
navigator.getUserMedia, navigator.geolocation, ...
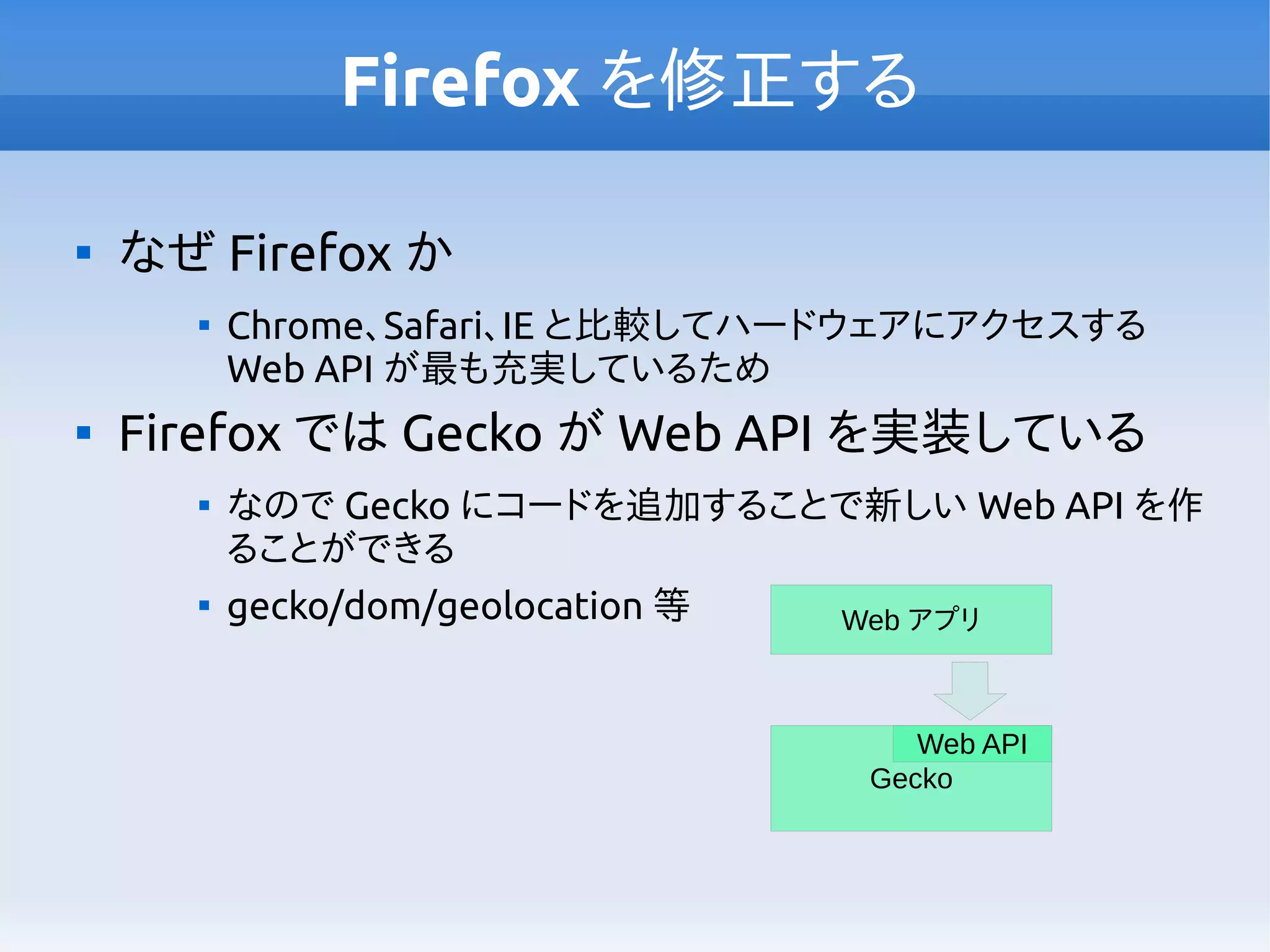
17. 18. 19. Firefox を修正する
なぜ Firefox か
Chrome、Safari、IE と比較してハードウェアにアクセスする
Web API が最も充実しているため
Firefox では Gecko が Web API を実装している
なので Gecko にコードを追加することで新しい Web API を作
ることができる
gecko/dom/geolocation 等
Gecko
Web アプリ
Web API
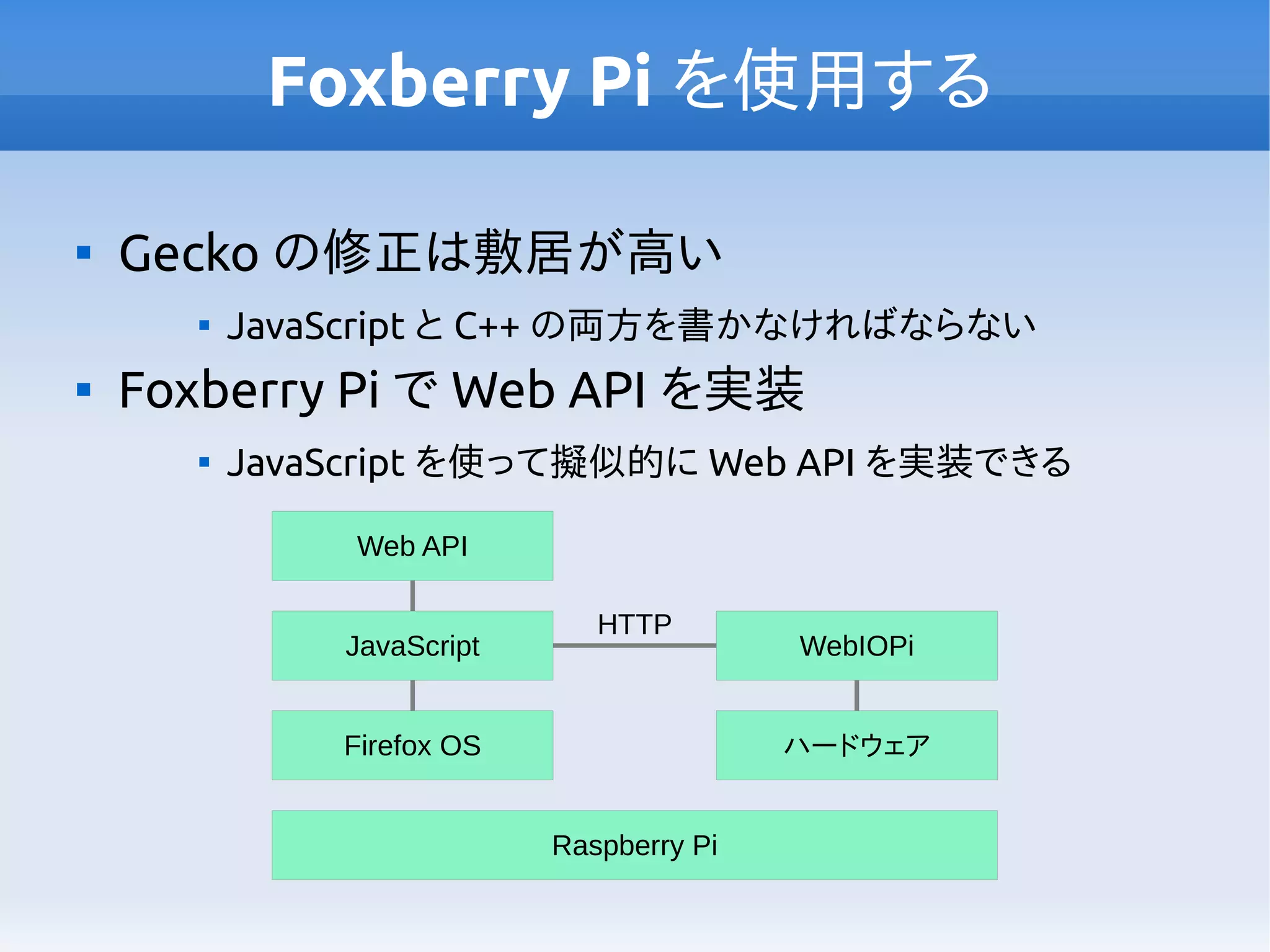
20. Foxberry Pi を使用する
Gecko の修正は敷居が高い
JavaScript と C++ の両方を書かなければならない
Foxberry Pi で Web API を実装
JavaScript を使って擬似的に Web API を実装できる
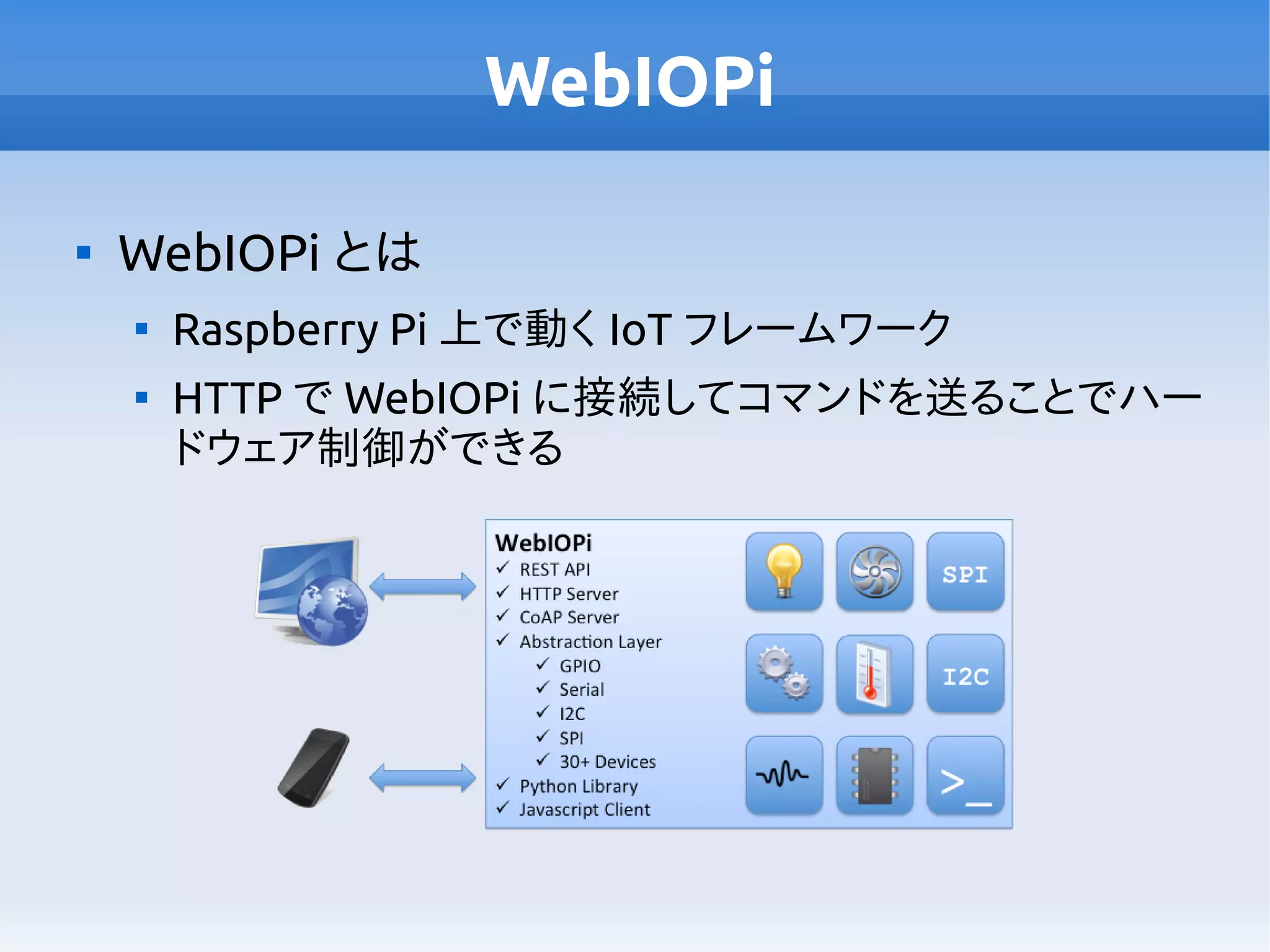
Firefox OS
JavaScript WebIOPi
ハードウェア
HTTP
Raspberry Pi
Web API
21. 22. 必要な Web API は
ロボットを動かす API
ロボットを動かす = モーターを動かす
ロボットの情報を受け取る API
ロボットの関節の状態
ロボットに搭載したセンサーの情報
カメラの情報 (これは既存の WebRTC で取得)
必要なのは GPIO と I2C
23. 24. 25. Web GPIO API
Web GPIO API
navigator.mozGpio.write(ピン番号, 値)
例えば 10 番ピンにモーターがつながっている場合、以下のよ
うに on/off できる
navigator.mozGpio.write(10, 1) で on
navigator.mozGpio.write(10, 0) で off
navigator.mozGpio.read(ピン番号, 値)
26. Web I2C API
Web I2C API
navigator.mozI2c.getI2cDevice(デバイス名,アドレス)
I2c デバイスの取得
i2c_device.write/read(レジスタアドレス, 値);
レジスタへの書き込み、レジスタの読み取り
例
DRV8830 を用いたモーター制御
var i2c_device =
navigator.mozI2c.getI2cDevice("/dev/i2c-1", 0x64);
i2c_device.write(0x00, 0xfd);
27. 28.