Download as PDF, PPTX

![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Background and Motivation
Rescue Robotics, Robots for Disaster Response
Application Domains
Definition
Search and Rescue
The essence of USAR is to save lives but, other
possibilities include [35, 49]:
search, reconnaissance and mapping,
rubble removal, structural inspection,
in-situ medical assessment and intervention,
acting as a mobile beacon or repeater,
serving as a surrogate,
adaptively shoring unstable rubble,
logistics support, instant deployment,
among other human-impossible tasks.
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 5 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-5-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Background and Motivation
Disaster Response
Persistent Disaster Response Operational Procedure [31, 49, 35].
1) Gather the facts.
2) Asses damage.
3) Identify and acquire resources.
4) Establish rescue priorities.
5) Develop a rescue plan.
6) Conduct the search and rescue operations.
Search , cover , follow walls , analyse debris ,
listen for survivors , develop everything that is considered
as useful for saving lives. According to [49], this step is
the one that takes the longest time.
7) Evaluate progress.
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 6 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-6-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Background and Motivation
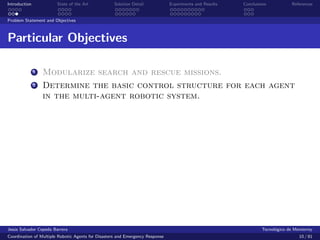
72-Golden Hours for Robotic Usage
Figure: A typical behavior in victim
localization [49].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 7 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-7-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Background and Motivation
72-Golden Hours for Robotic Usage
Figure: A typical behavior in victim
localization [49].
Figure: Autonomy trends towards 2015 [7].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 7 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-8-320.jpg)


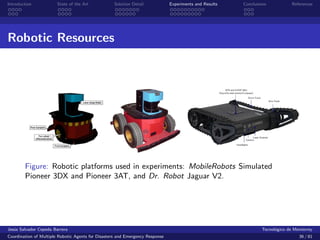
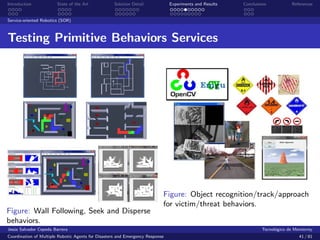
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Relevant Implementations
Real Implementations: No significant results.
Figure: Real pictures from the WTC
Tower 2. a) shows a rescue robot
within the white box navigating in
the rubble; b) robots-eye view with
three sets of victim remains. Image
edited from [33] and [32] Figure: Mine rescue: a) (SE),
b)(BE), c) (VE), d) Inuktun in a
BE [34].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 12 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-18-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Relevant Implementations
A Particular Need for Rescue Robots
Rescue Robots [35, 49]
Built for specific purposes,
Witnessed Human Errors [31]. Robots do not look for
Untrained volunteers, relatives,
Too many volunteers, Instant deployable,
Encountered priorities, No emotions, no frustrations,
Bureaucracy/Formalities, Usually expendable,
Emotions, frustrations, ... Highly capable for search
and coverage, wall following,
sensing under harsh
environments, ...
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 13 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-19-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Relevant Implementations
Testbed Implementations
Figure: MRS for search and
monitoring: a) Piper J3 UAVs; b) Figure: Demonstration of integrated
heterogeneous UGVs. Edited search operations: a) robots at
from [23] initial positions, b) robots searching
for human target, c) alert of target
found, d) display nearest UGV view
of the target. Edited from [23]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 14 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-20-320.jpg)
![Open Issues
Research Challenges [35, 49, 47]
Mobility
Power
Sensors and Perceptions
Suitable Communications
Localization and Mapping
Control Infrastructures
Autonomy Levels
Human-Robot Interfacing
Cooperation
Figure: Major challenges for networked Task Allocation
robots. Image from [24].
Resource Management
Strategies
Performance Metrics
Components’ Performance](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-21-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Standards and Significant Results
USAR International Standards: RoboCup Rescue
Figure: Standardized test arenas for
rescue robotics: a) Red Arena, b)
Orange Arena, c) Yellow Arena.
Image from [9]
Figure: Standardized evaluations
provided by the NIST [38].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 16 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-22-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Standards and Significant Results
Coordination, Localization and Mapping
Figure: Coordinated Figure: Real model
exploration using Figure: Visual and generated maps
costs and utilities. localization and path of a 60 m. hall using
Edited from [8] following. Edited a MRS.Image
from [20] from [21].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 17 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-23-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Standards and Significant Results
Recognition and User Interfacing
Figure: Human and human-behavior Figure: Interface for multi-robot
vision-based recognition. Edited rescue systems. Image from [37]
from [17, 36]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 18 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-24-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Standards and Significant Results
Roadmap to 2015 [49]
Unmanned vehicles will be more capable to search and
gather information from disasters.
HRI: augmented autonomy and intelligence on robots.
Robots should be able to enter the rubble and navigate over and
inside the debris.
Robot emergency diagnosis of victims should be possible as well as
3D mapping in real time.
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 19 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-25-320.jpg)
![Multi-Agent Systems Engineering: MaSE [51]](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-27-320.jpg)
![Capturing Goals
Figure: USAR Requirements [46, 3, 13, 15, 44, 48, 35, 49, 47]](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-28-320.jpg)
![Applying Use Cases: SD-I
Figure: Sequence Diagram I: Explore and
Cover [27, 28, 29, 30, 4, 39, 14, 41, 1, 8, 50, 19, 6, 42, 18, 22, 33, 35]](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-29-320.jpg)
![Applying Use Cases: SD-IIa
Figure: Sequence Diagram IIa: Recognize and
Identify [26, 29, 39, 5, 43, 25, 17, 36, 16, 40]](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-30-320.jpg)
![Applying Use Cases: SD-IIb
Figure: Sequence Diagram IIb: Recognize and
Identify [26, 29, 39, 5, 43, 25, 17, 36, 16, 40]](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-31-320.jpg)
![Applying Use Cases: SD-III
Figure: Sequence Diagram III: Support and
Relief [8, 6, 13, 3, 40, 24, 49, 35, 15, 44]](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-32-320.jpg)
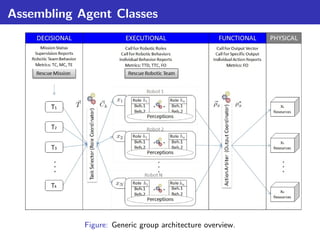
![Agent Classes
Figure: Generic robot architecture overview.
Figure: Coordination methods for behavior-based control. Edited from [2].](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-37-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
MaSE: Design
2-leveled Hybrid Coordination: FSA + BBC
Figure: Classic and new artificial intelligence approaches. Edited from [45].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 33 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-39-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
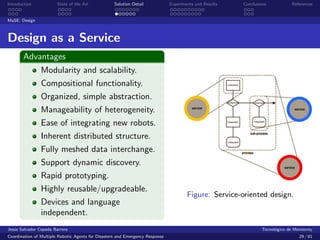
MaSE: Design
Implementations and Communications Topology
Figure: Service-oriented group architecture [12].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 34 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-40-320.jpg)
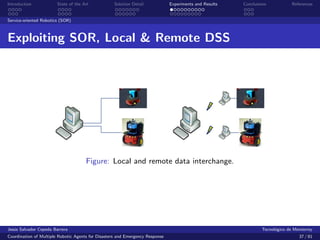
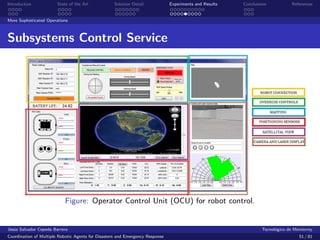
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
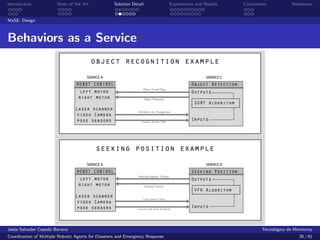
Service-oriented Robotics (SOR)
Flexible Integrated Service, Fast Prototyping
Figure: Highly transparent simulation to reality [10].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 38 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-44-320.jpg)
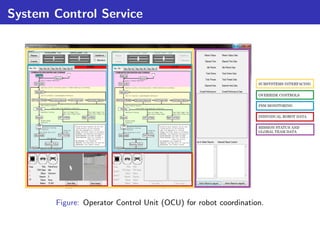
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Service-oriented Robotics (SOR)
Testing Multiple Service Providers
Figure: Developed tests with off-the-shelf provided services [10].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 39 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-45-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Service-oriented Robotics (SOR)
Testing the Network
Figure: Subscription process and messaging in the proposed architecture [12].
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 40 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-46-320.jpg)
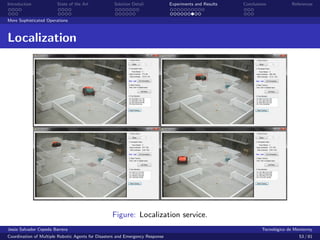
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Service-oriented Robotics (SOR)
Testing Composite Behaviors Services
Figure: Flocking and Exploration behaviors (Video). [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 42 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-48-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Service-oriented Robotics (SOR)
Interesting Observation, Complexity Reduction
Figure: Comparison between a) most popular literature
and b) our behavior-based autonomous exploration. [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 43 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-49-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Service-oriented Robotics (SOR)
An effective behavior, Avoid Past
Figure: 8 possible 45◦ heading cases with 3 neighbor waypoints to
evaluate so as to define a CCW, CW or ZERO angular acceleration
command. Search for visited waypoints is done through a hashtable, thus
producing an algorithm complexity of O(1). [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 44 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-50-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Service-oriented Robotics (SOR)
The coordination behavior, Disperse
Figure: Disperse behavior activates just in the case two or more robots
get into a predefined comfort zone. Thus, for m robots near in a pool of
n robots, where m ≤ n, we call for appropriate dispersion action
concerning an algorithm complexity of O(m2 ). [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 45 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-51-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Service-oriented Robotics (SOR)
The emergent behavior, Explore
Figure: Using a Finite State Automata (FSA) we achieve our Explore
emergent behavior, where we fuse the outputs of the triggered
behaviors. [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 46 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-52-320.jpg)
![Autonomous Exploration Robustness
Figure: Qualitative appreciation for autonomous exploration across different scenarios. [11]](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-53-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
More Sophisticated Operations
Interesting Results: Single Robot
Figure: Autonomous exploration results using one robot. [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 48 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-54-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
More Sophisticated Operations
Interesting Results: Multi-Robot (1)
Figure: Autonomous exploration results using multiple robots. [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 49 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-55-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
More Sophisticated Operations
Interesting Results: Multi-Robot (2)
Figure: Autonomous exploration results using multiple robots. [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 50 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-56-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
More Sophisticated Operations
Single Robot Exploration
Figure: Single Robot Real Implementations Results (Video). [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 54 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-60-320.jpg)
![Multi-Robot Exploration
Figure: Multi-Robot Real Implementations Results (Video). [11]](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-61-320.jpg)
![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
Summary of Contributions
Summary of Contributions (3)
Literature
Cepeda, J. S.; Chaimowicz, L. & Soto, R. Exploring Microsoft
Robotics Studio as a Mechanism for Service-Oriented Robotics
Latin American Robotics Symposium and Intelligent Robotics Meet-
ing, IEEE Computer Society, 2010 , 0, 7-12. [10]
Cepeda, J. S.; Soto, R.; Gordillo, J. & Chaimowicz, L. Towards a
Service-Oriented Architecture for Teams of Heterogeneous Au-
tonomous Robots Artificial Intelligence (MICAI), 2011 10th Mexican
International Conference on, 2011 , 102-108. [12]
Cepeda, J. S.; Chaimowicz, L.; Soto, R.; Gordillo, J.; Alan´
ıs-Reyes, E.
& Carrillo-Arce, L. C. A Behavior-Based Strategy for Single and
Multi-Robot Autonomous Exploration Sensors, 2012 , Special Is-
sue: New Trends towards Automatic Vehicle Control and Perception
Systems. [11]
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 59 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-65-320.jpg)


![Introduction State of the Art Solution Detail Experiments and Results Conclusions References
References XIV
Y. Nevatia, T. Stoyanov, R. Rathnam, M. Pfingsthorn, S. Markov,
R. Ambrus, and A. Birk.
Augmented autonomy: Improving human-robot team performance in
urban search and rescue.
In Intelligent Robots and Systems, 2008. IROS 2008. IEEE/RSJ
International Conference on, pages 2103 –2108, sept. 2008.
National Institute of Standards and Technology.
Performance metrics and test arenas for autonomous mobile robots
[online]: http://www.nist.gov/el/isd/testarenas.cfm, 2011.
L. E. Parker.
Alliance: an architecture for fault tolerant multirobot cooperation.
Robotics and Automation, IEEE Transactions on, 14(2):220 –240,
apr 1998.
Jes´s Salvador Cepeda Barrera
u Tecnol´gico de Monterrey
o
Coordination of Multiple Robotic Agents for Disasters and Emergency Response 76 / 81](https://image.slidesharecdn.com/comradery-finalversion-121215100850-phpapp02/85/COMRADES-82-320.jpg)

The document discusses the coordination of multiple robotic agents for disaster and emergency response, focusing on the development of a mobile robotic system to facilitate search and rescue operations. It outlines the problem statement, objectives, relevant implementations, and proposed solutions, including the design and experiments conducted. The study emphasizes the importance of innovative algorithms and multi-agent systems to enhance the efficacy and efficiency of rescue missions.

















































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)

















