Download to read offline
![Variance estimation bias
1.5 1.5 1.5
1 1 1
0.5 0.5 0.5
0 0 0
-0.5 -0.5 -0.5
-1 -1 -1
-1.5 -1.5 -1.5
0 5 10 15 20 25 30 35 40 45 50 0 5 10 15 20 25 30 35 40 45 50 0 5 10 15 20 25 30 35 40 45 50
Variance estimate N N
1 1
s2 = ∑ ∆xi2 ∆xi = xi −
N
∑ xi s 2 ≅ σ 2 , N large
N i =1 i =1
Random signal plus trend xi' = xi + f i
Biased variance estimate Es [ ] 2 2
=σx +
1
N
N
∑ fi2
i =1
bias
Standard deviation 0.23 0.43
8](https://image.slidesharecdn.com/burnsei2013deadleaves-130213194806-phpapp02/75/Refined-Measurement-of-Digital-Image-Texture-Loss-8-2048.jpg)
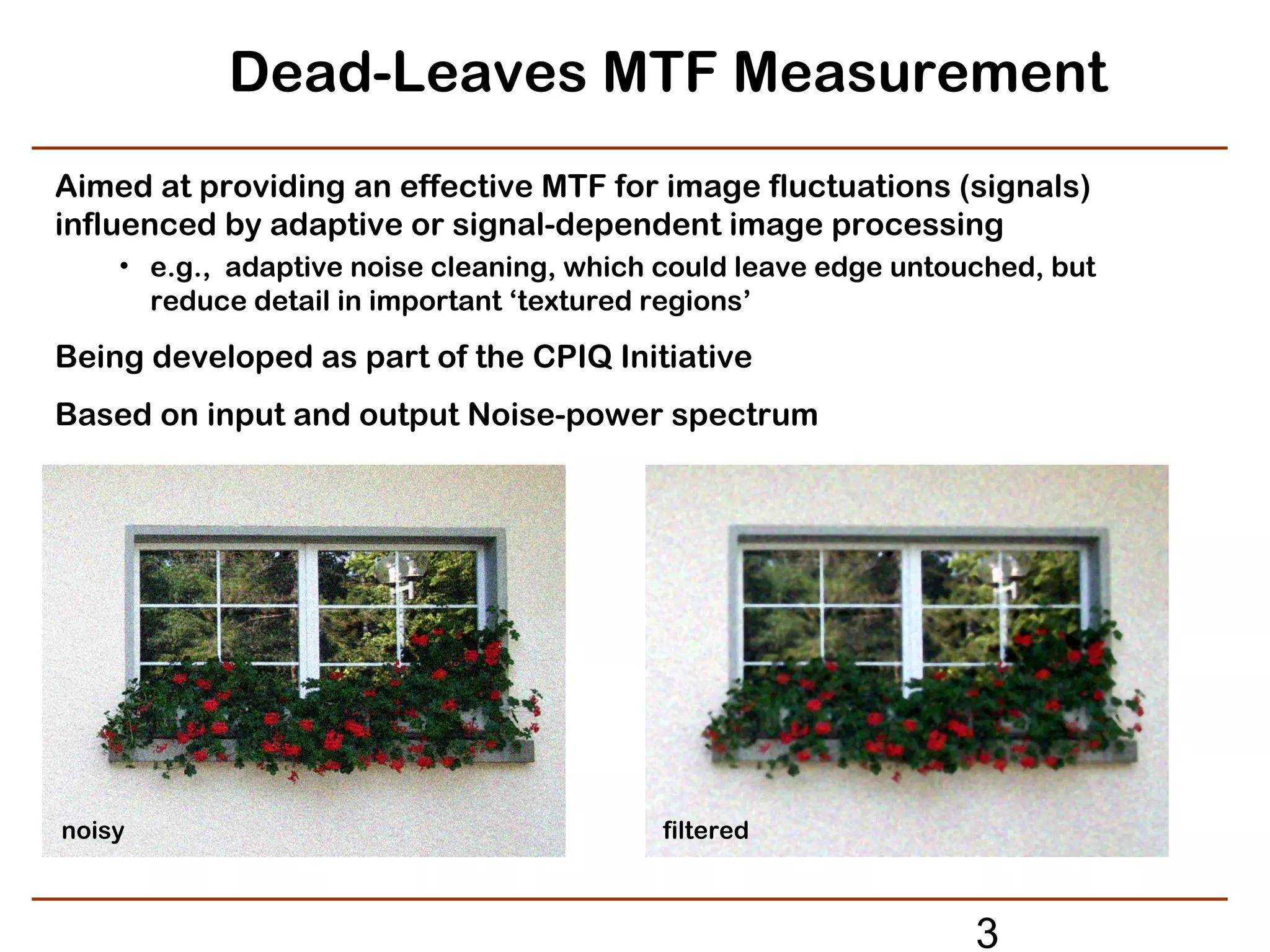
![Texture-MTF Results from Camera Testing
NPS error MTF error
Mean relative error reduction (N=5 replicates)
• All frequencies [0, 0.5 cy/pixel] 20%.
• Low frequencies [0, 2.5 cy/pixel] 26%.
1.2 1.2
1 1
0.8 0.8
txt
MTFtxt
MTF
0.6 0.6
0.4 0.4
0.2 0.2
0 0
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Frquency, cy/mm Frquency, cy/mm
no trend removal 2D-linear fit and subtraction
Final scaling was done at 0.02 cy/pixel
13](https://image.slidesharecdn.com/burnsei2013deadleaves-130213194806-phpapp02/75/Refined-Measurement-of-Digital-Image-Texture-Loss-13-2048.jpg)

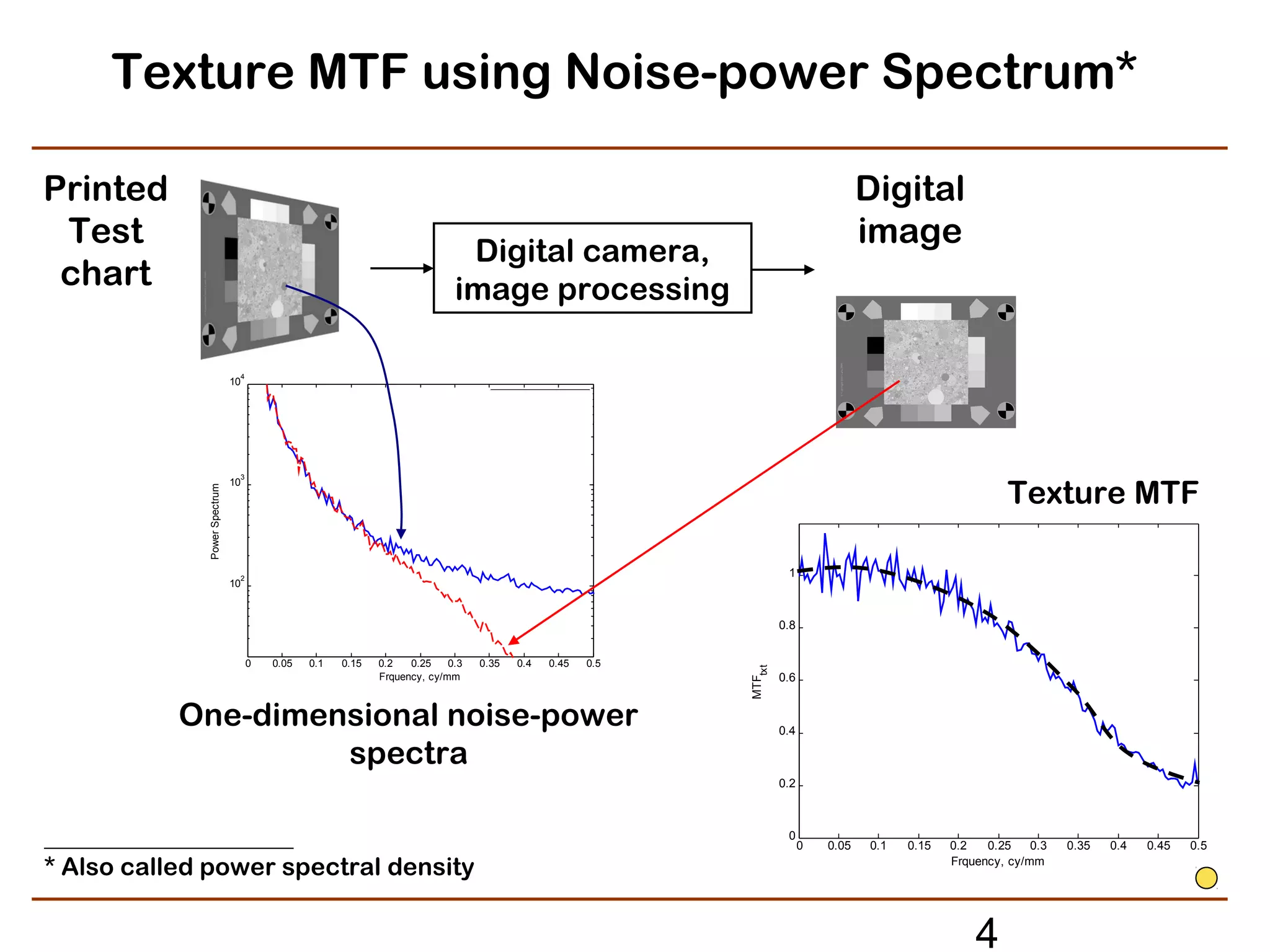
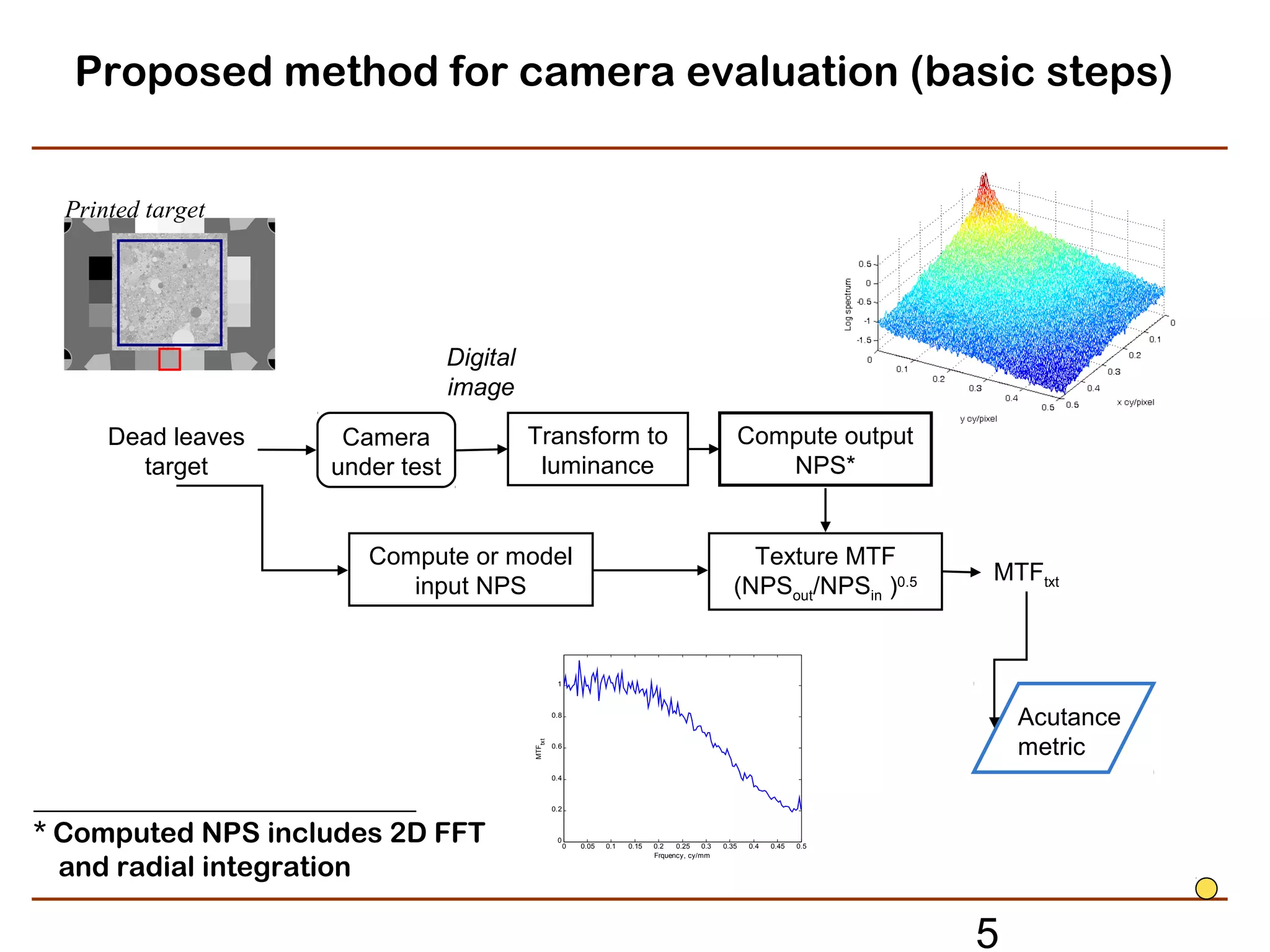
The document discusses refined methods for measuring digital image texture loss using targets with random objects. Specifically, it proposes measuring texture modulation transfer function (MTF) based on analyzing the noise power spectrum of input and output images. This approach aims to provide an effective MTF measure for image areas influenced by adaptive or signal-dependent processing, such as noise cleaning. Key steps involve computing the noise power spectrum of a noisy input target image, applying the imaging system or processing under test, and computing the output noise power spectrum to determine the texture MTF. The method seeks to provide a practical texture loss measurement but must address random and bias errors introduced during estimation of noise power spectra.