Downloaded 44 times
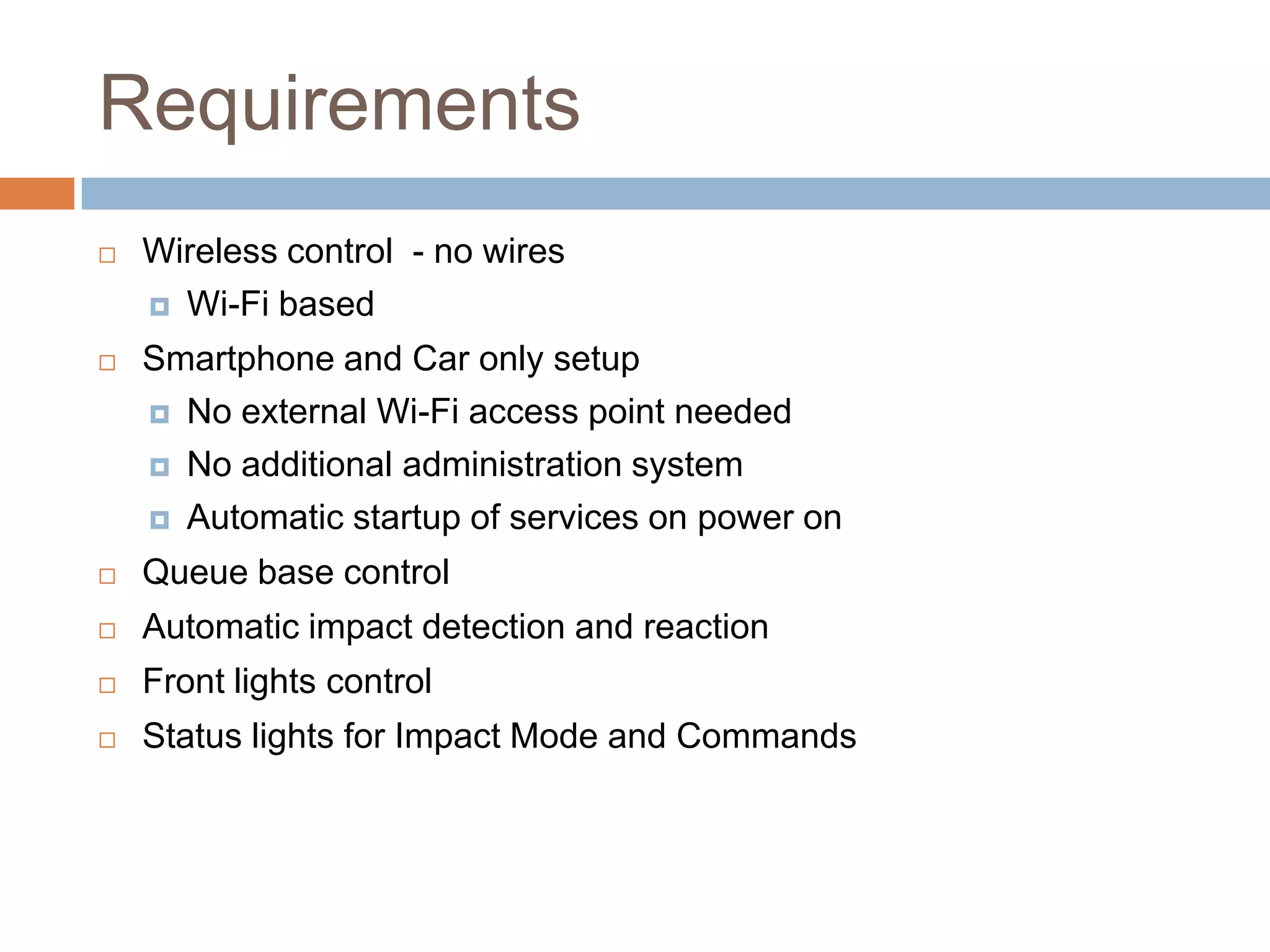
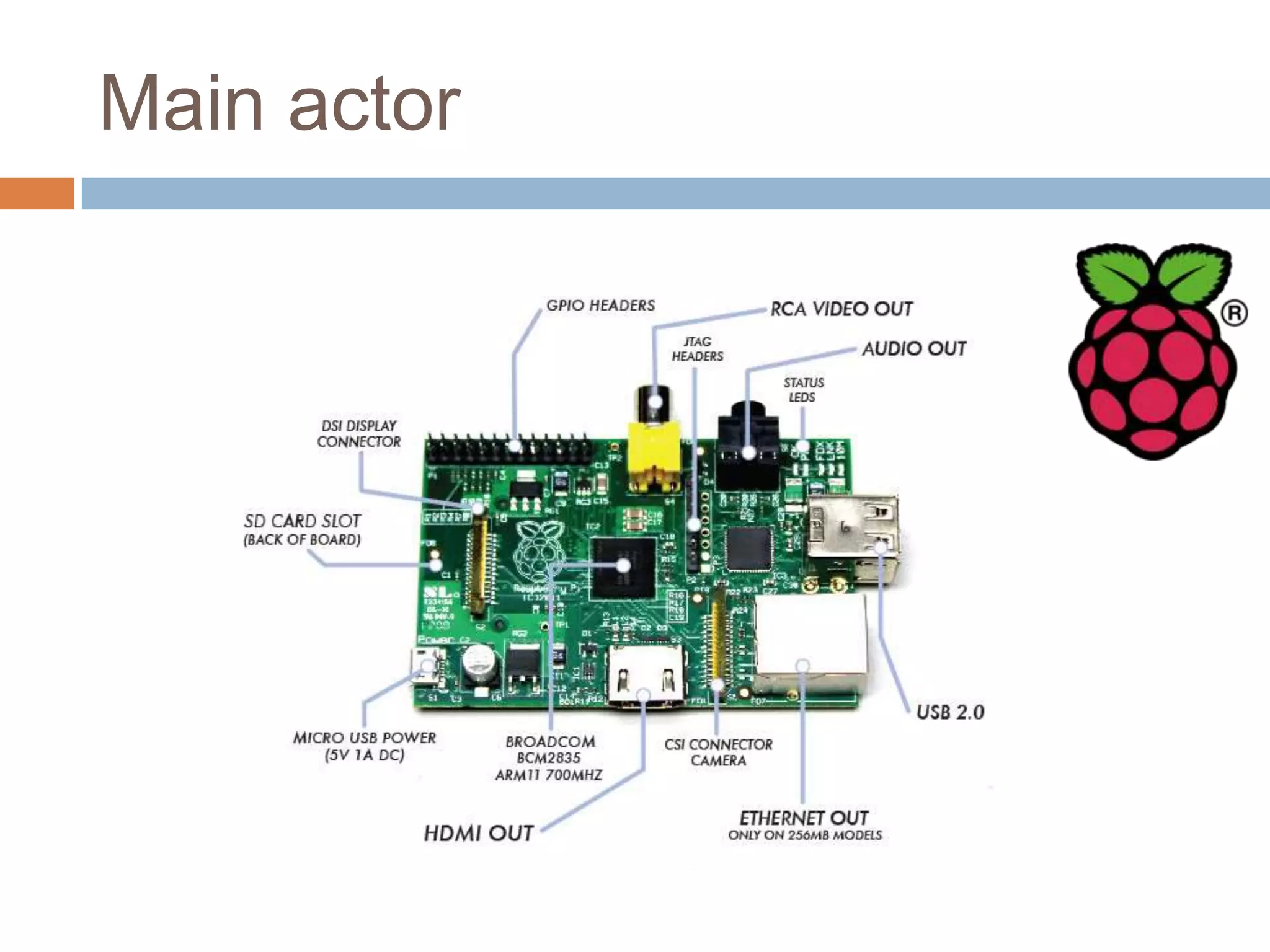
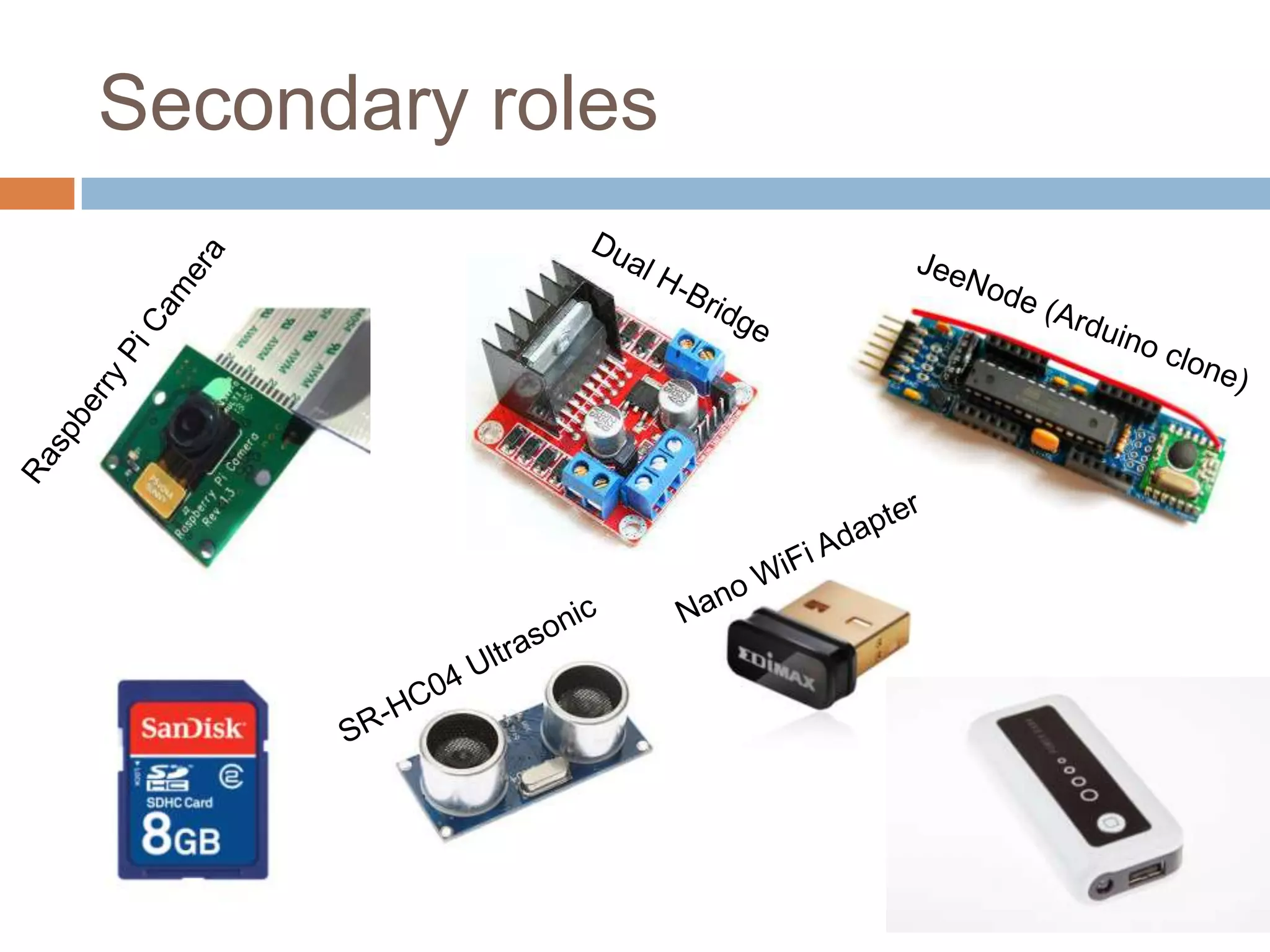

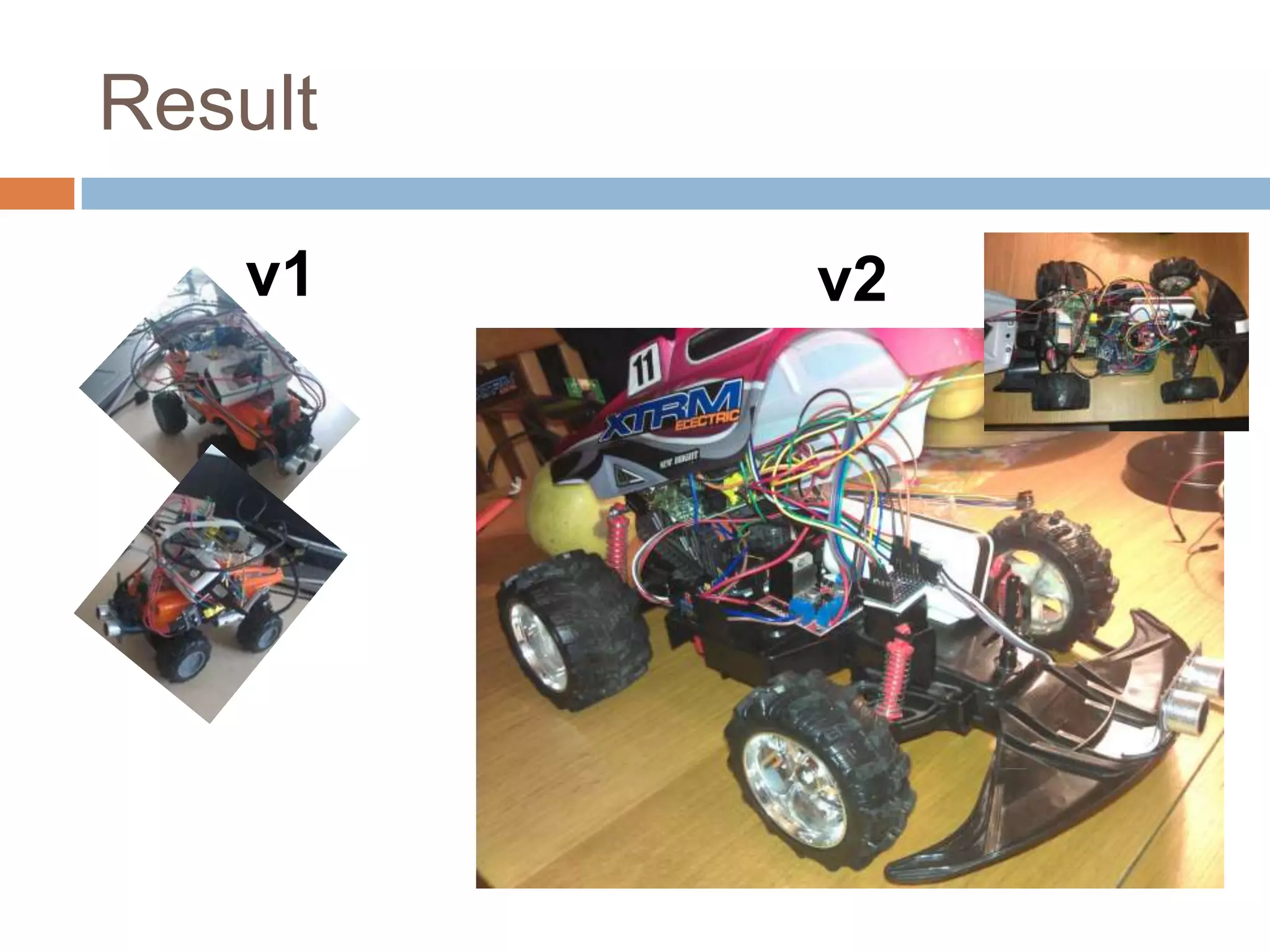


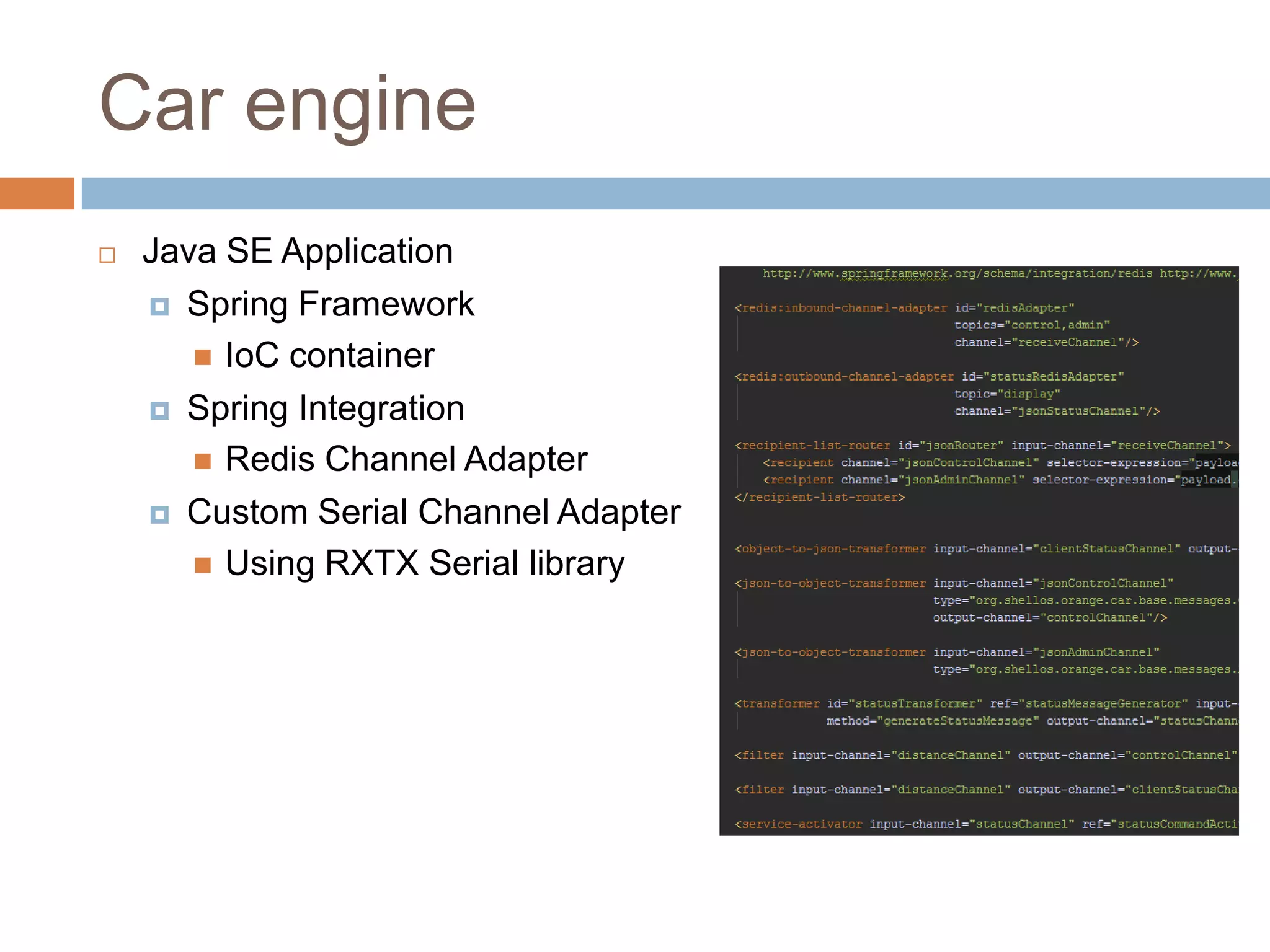
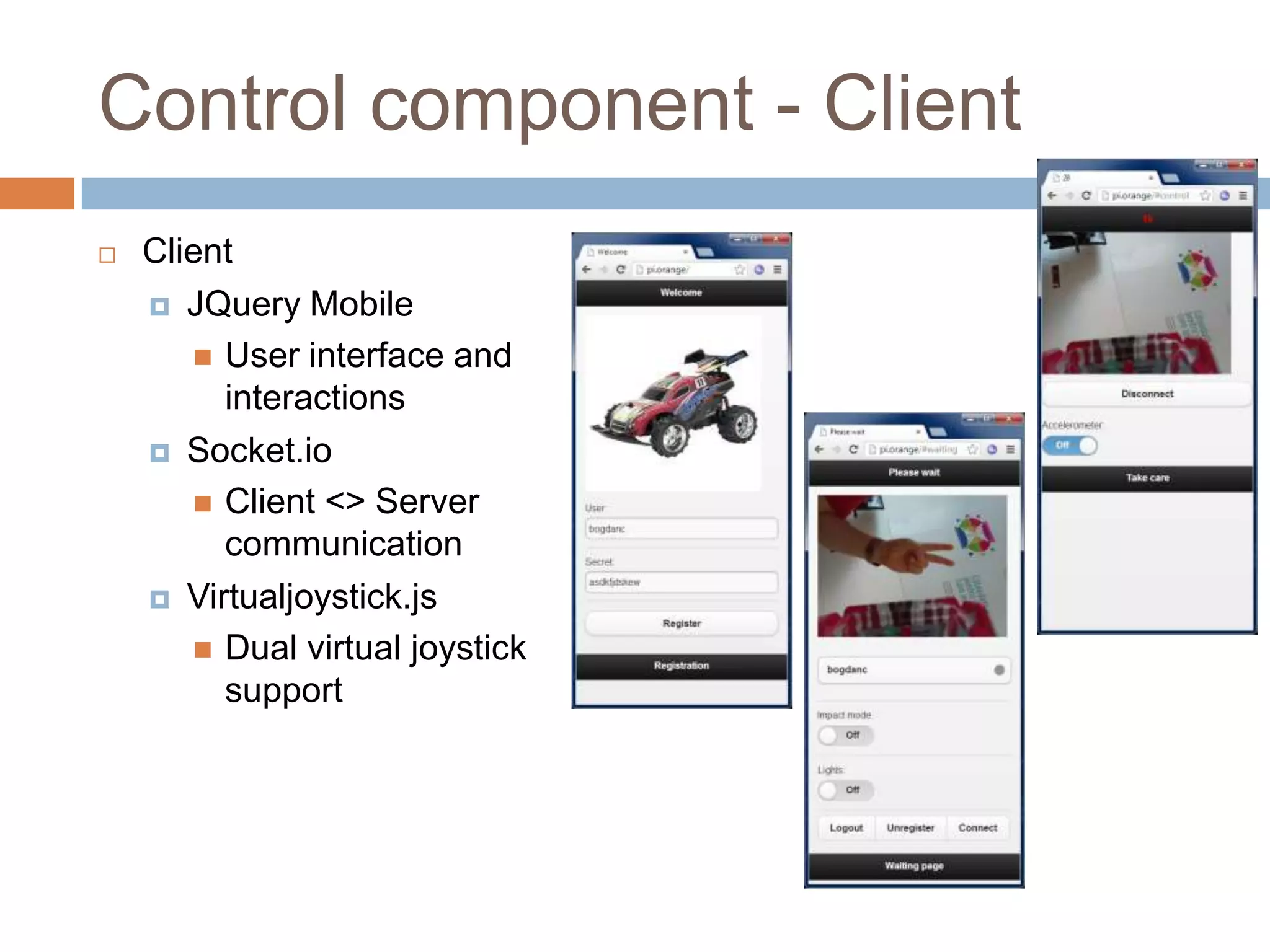
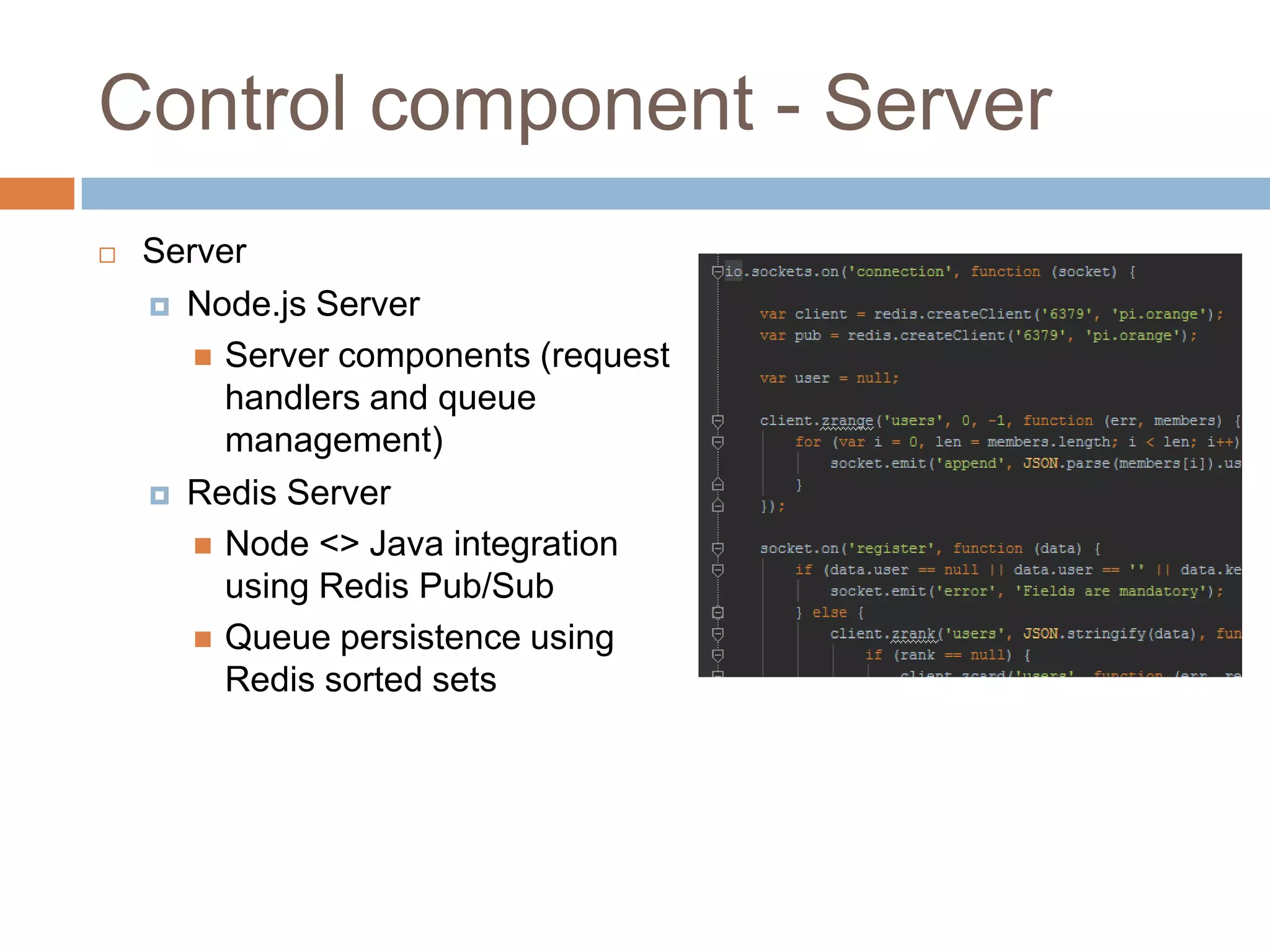
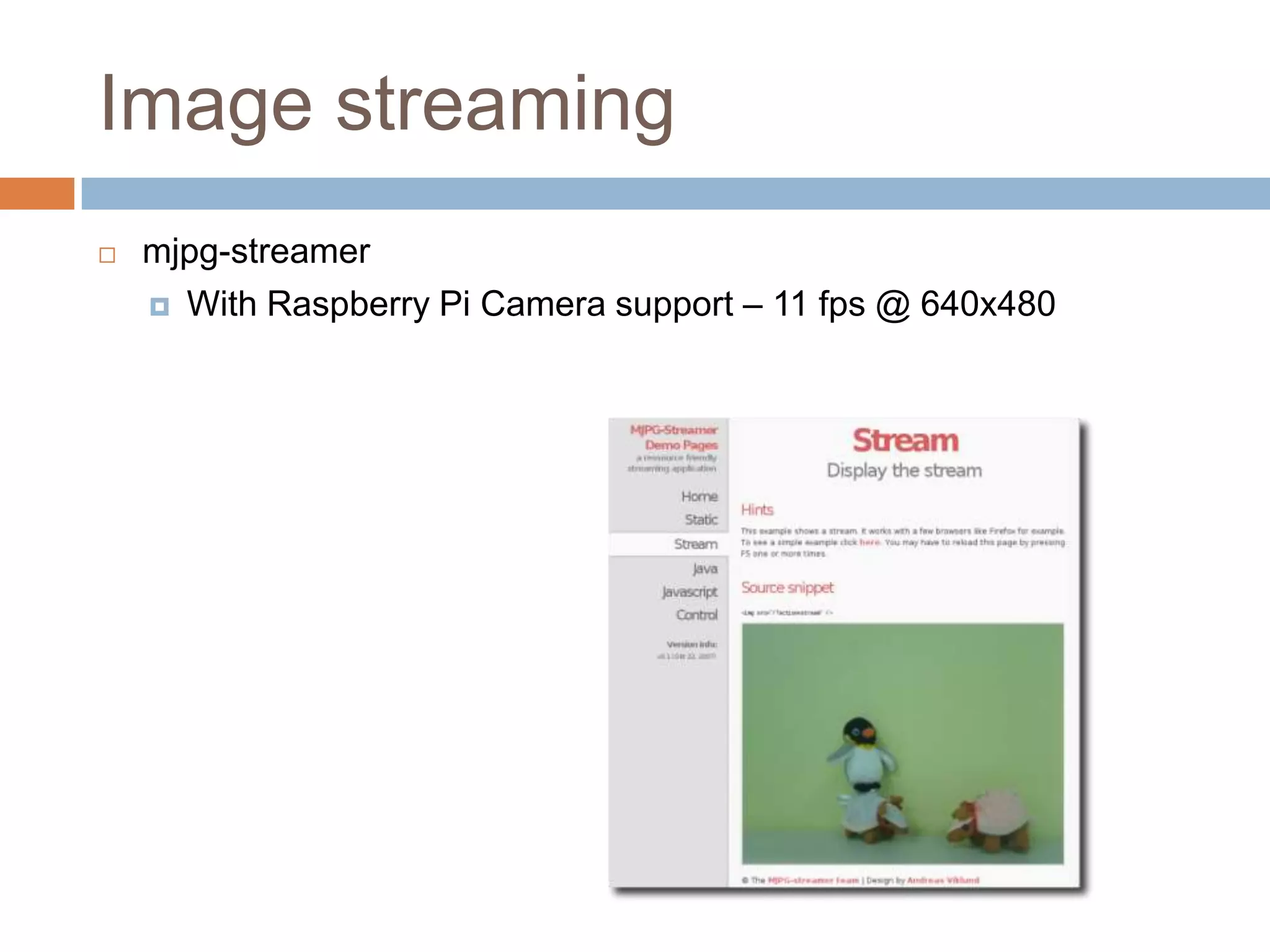
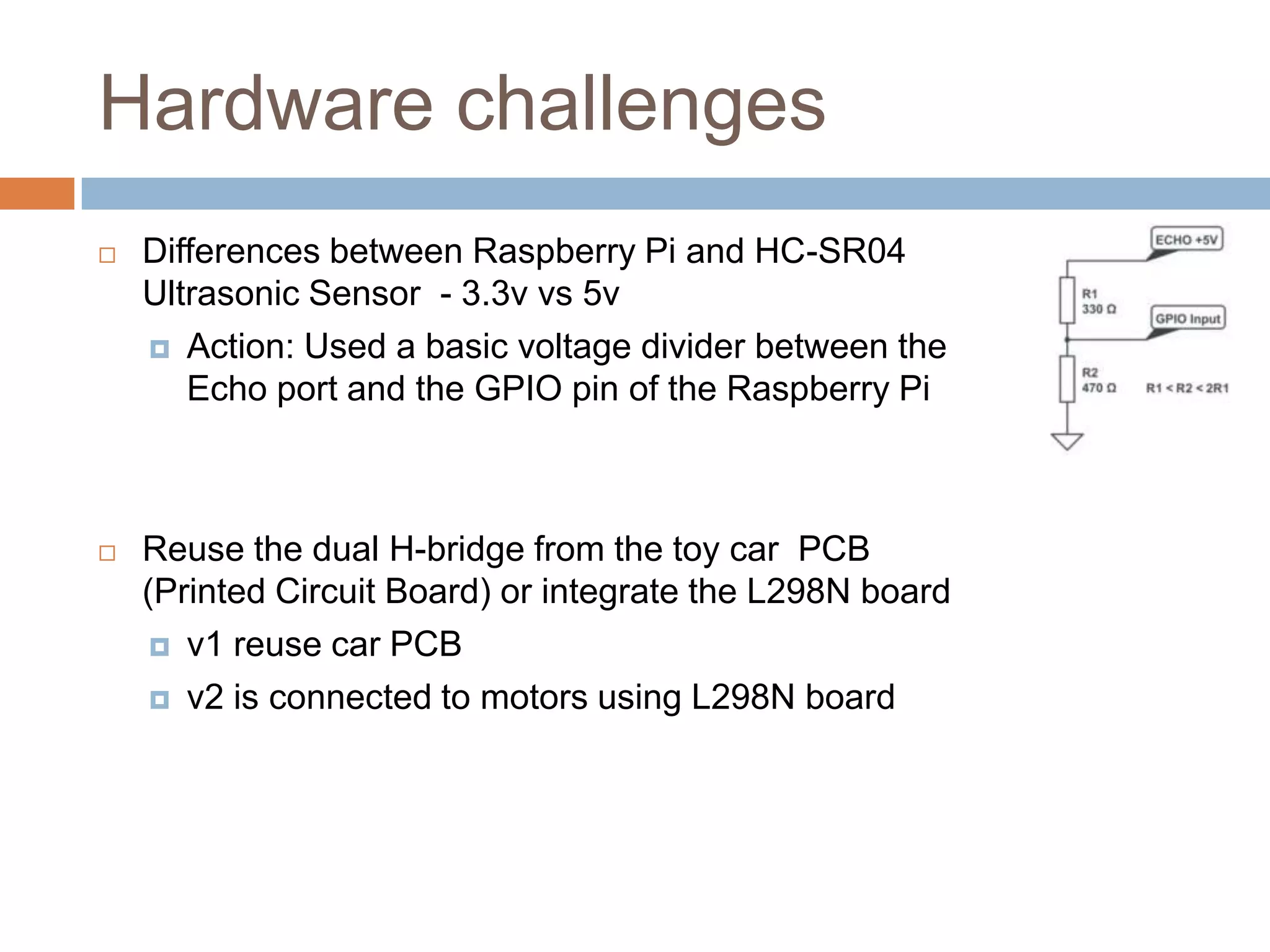
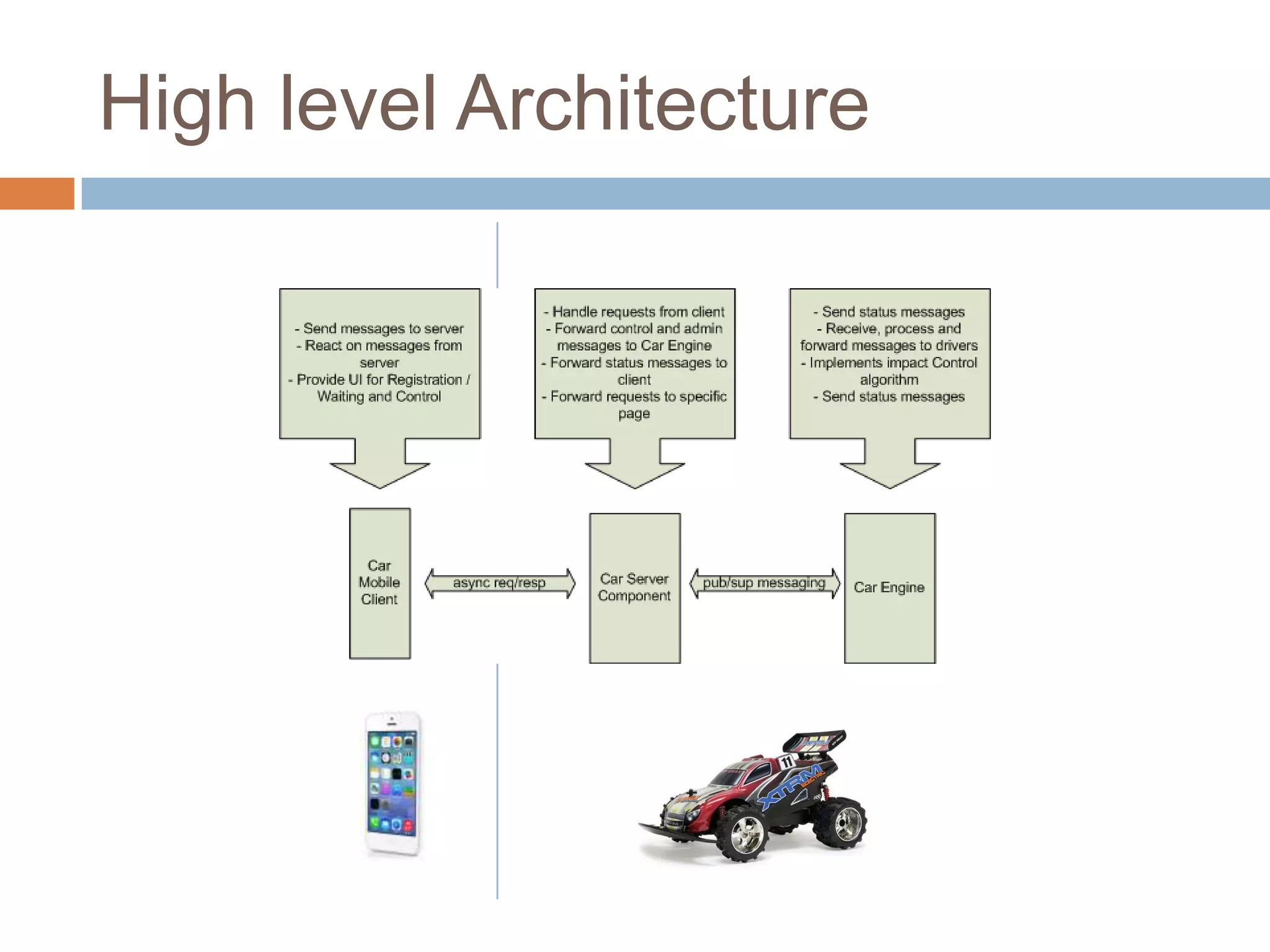
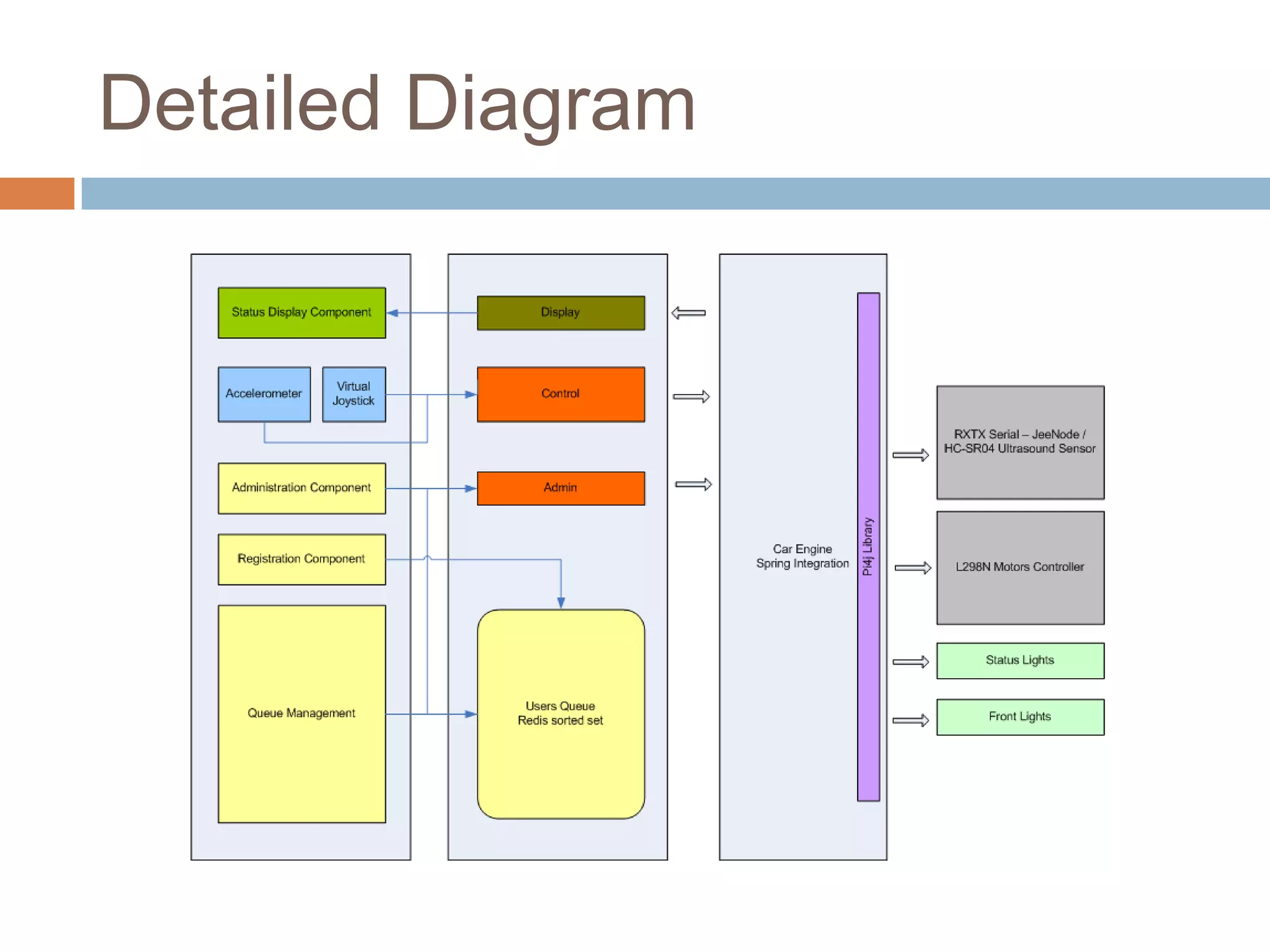
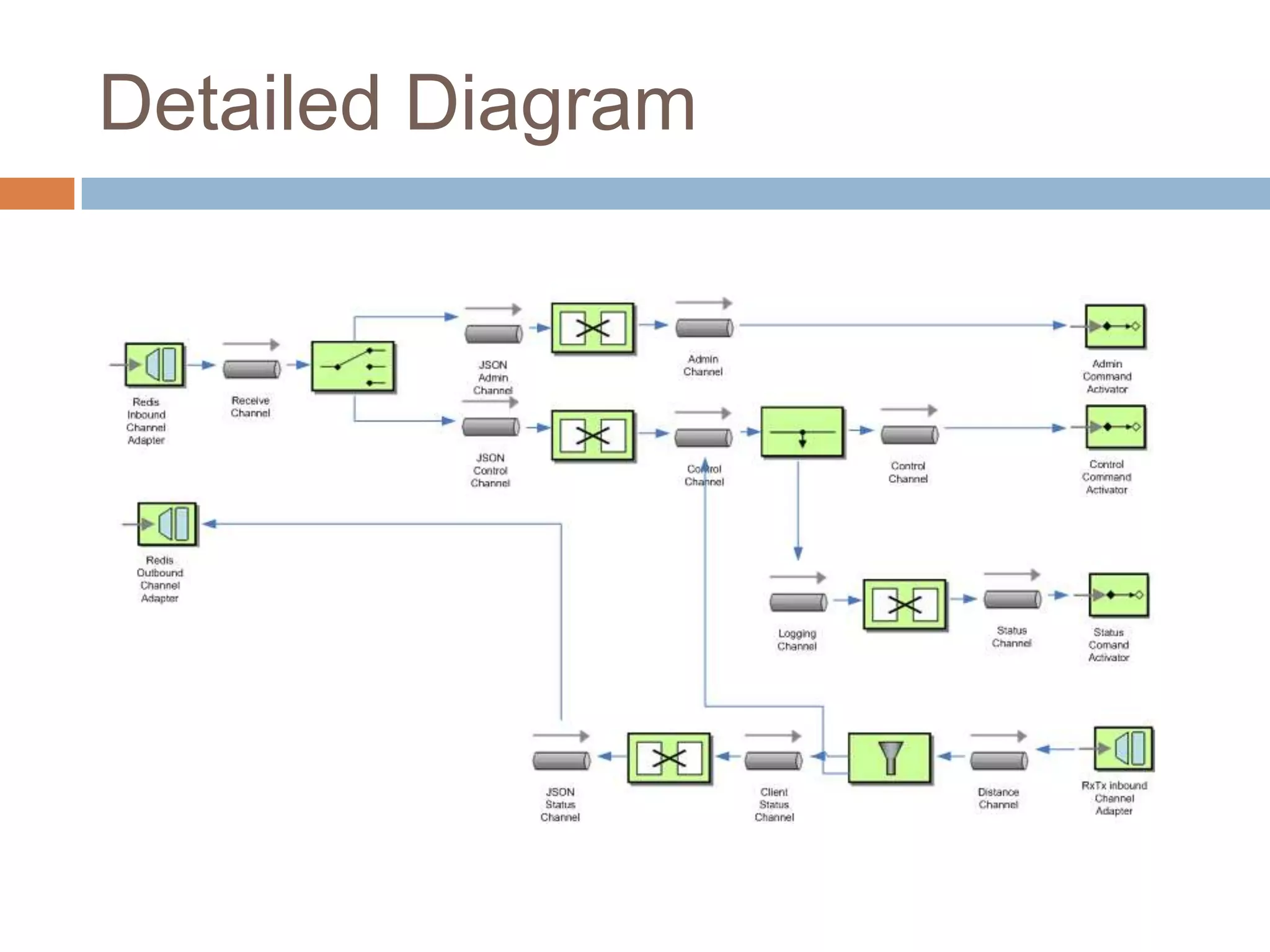
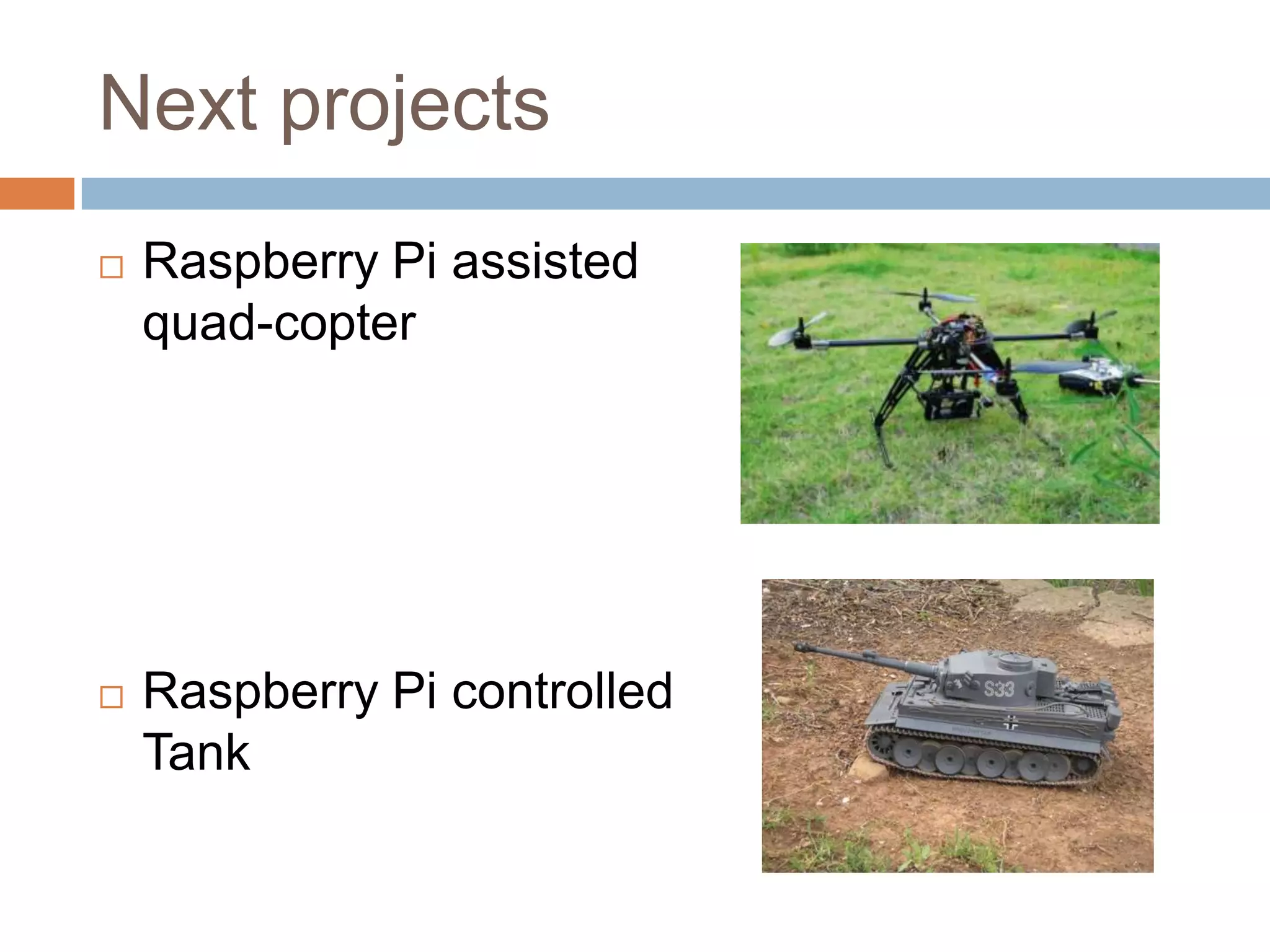

This document discusses building a remote controlled car using a Raspberry Pi. The car uses WiFi to connect to a smartphone app for control. The software runs on Java and Node.js and integrates services like Redis. Hardware challenges included modifying an ultrasonic sensor for the Raspberry Pi and reusing parts from a toy car. Lessons learned focused on automation, testing, and prototyping. Future projects discussed using a Raspberry Pi for a quadcopter or tank.