Downloaded 80 times
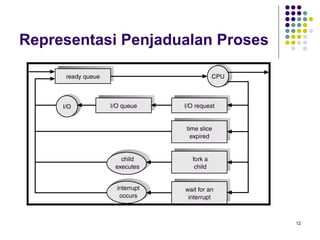
![23
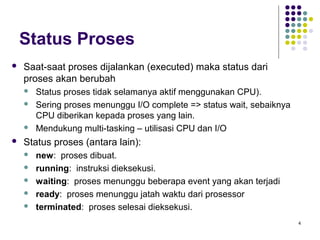
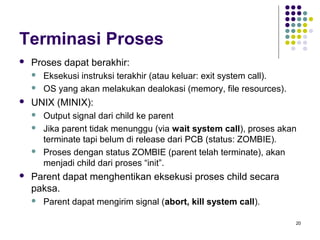
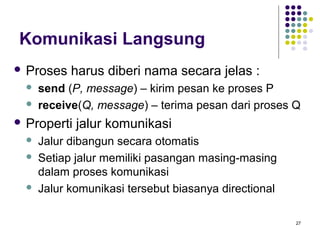
Bounded-Buffer –
Solusi dari Shared Memory
Shared data
#define BUFFER_SIZE 10
Typedef struct {
. . .
} item;
item buffer[BUFFER_SIZE];
int in = 0;
int out = 0;
Solution is correct, but can only use
BUFFER_SIZE-1 elements](https://image.slidesharecdn.com/sliit-012336-3-1-4proses-141014050924-conversion-gate02/85/Proses-di-Sistem-Operasi-23-320.jpg)
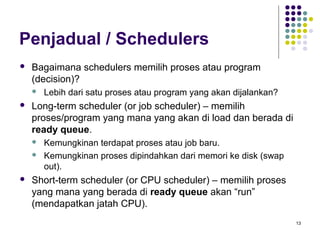
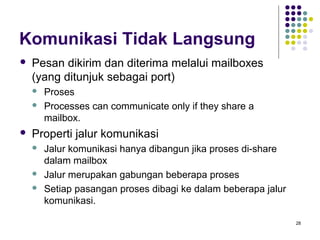
![24
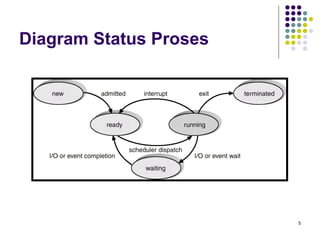
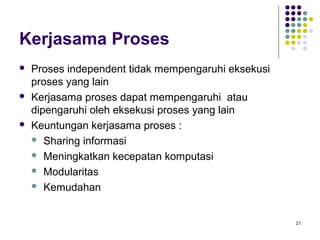
Bounded-Buffer – Proses Producer
item nextProduced;
while (1) {
while (((in + 1) % BUFFER_SIZE) == out)
; /* do nothing */
buffer[in] = nextProduced;
in = (in + 1) % BUFFER_SIZE;
}](https://image.slidesharecdn.com/sliit-012336-3-1-4proses-141014050924-conversion-gate02/85/Proses-di-Sistem-Operasi-24-320.jpg)
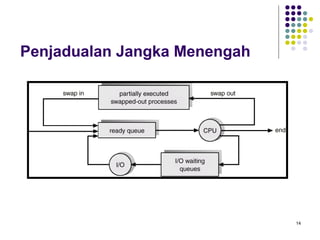
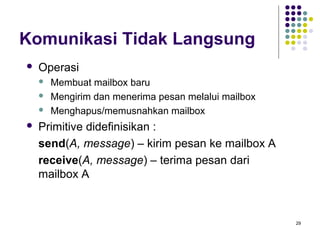
![25
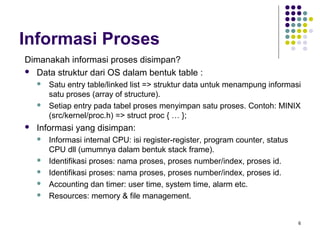
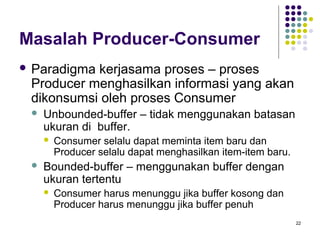
Bounded-Buffer – Proses Consumer
item nextConsumed;
while (1) {
while (in == out)
; /* do nothing */
nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
}](https://image.slidesharecdn.com/sliit-012336-3-1-4proses-141014050924-conversion-gate02/85/Proses-di-Sistem-Operasi-25-320.jpg)
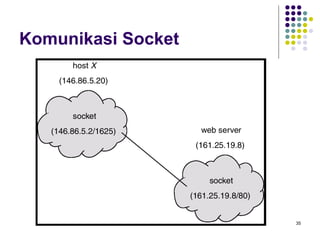

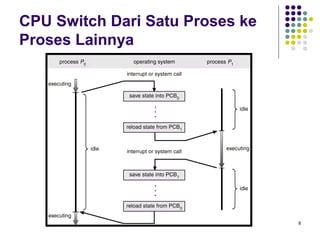
Dokumen tersebut memberikan ringkasan tentang konsep proses dalam sistem operasi. Proses adalah program yang sedang dieksekusi, yang memiliki informasi seperti status, identitas, dan sumber daya. Sistem operasi mengelola proses dengan menjadwalkan eksekusi, memantau status, dan memfasilitasi komunikasi antar proses. Proses dapat berinteraksi untuk menyelesaikan masalah produsen-konsumen dan berkomunikasi menggunakan mekanisme seperti pesan, socket, dan p






































































![Modul Ajar KBC SKI Kelas 6 MI [MODULKELAS.COM]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkbcskikelas6mimodulkelas-260207160743-753abfd0-thumbnail.jpg?width=640&height=640&fit=bounds)


![Modul Ajar Kurikulum Berbasis Cinta (KBC) SKI Kelas 11 [modulguruku.com]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkurikulumberbasiscintakbcskikelas11mamodulguruku-260211160930-802ab0b6-thumbnail.jpg?width=640&height=640&fit=bounds)








