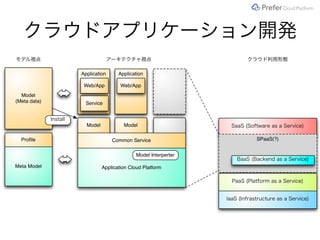
クラウドアプリケーション開発
IaaS (Infrastructure asa Service)
PaaS (Platform as a Service)
SaaS (Software as a Service)
SPaaS(?)
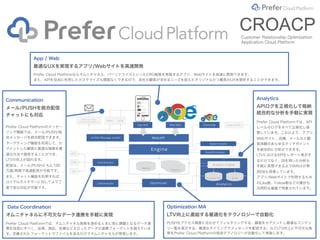
Application Cloud Platform
Application
Meta Model
Model
(Meta data)
Common Service
Application
Profile
モデル視点 アーキテク チャ 視点
Model Model
Install
ク ラ ウド 利用形態
Model Interperter
BaaS (Backend as a Service)
Web/App
Service
Web/App



























![SparkとJupyterNotebookを使った分析処理 [Html5 conference]](https://cdn.slidesharecdn.com/ss_thumbnails/html5conference-160903045852-thumbnail.jpg?width=640&height=640&fit=bounds)











![SaaSをもっと便利に、使いやすくする方法 [Oracle Cloud Days Tokyo 2016]](https://cdn.slidesharecdn.com/ss_thumbnails/d2-f2paasforsaasdl-2-161122132434-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DevSumi2019]Cloud Native アプリケーションに最適!Oracle Cloud Infrastructureの魅力!](https://cdn.slidesharecdn.com/ss_thumbnails/devsumi2019ocicloudnativeapps-190225085314-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Oracle Innovation Summit Tokyo 2018] お客様事例から見た"あえて"Oracle Cloudを選択する理由&次世代Ia...](https://cdn.slidesharecdn.com/ss_thumbnails/b-1oraclecloudiaasdatabaseshare-180813053927-thumbnail.jpg?width=640&height=640&fit=bounds)