Download to read offline






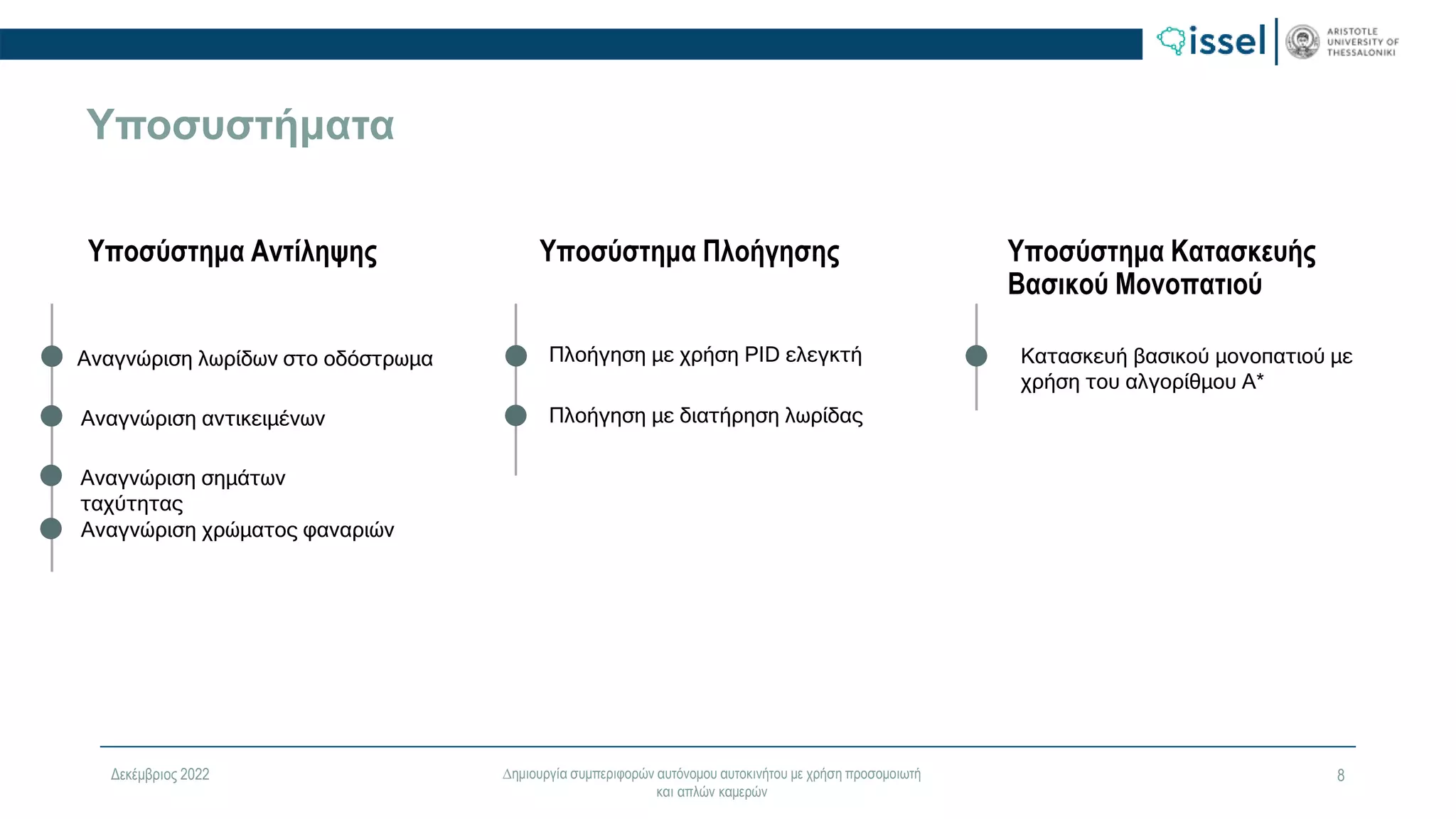


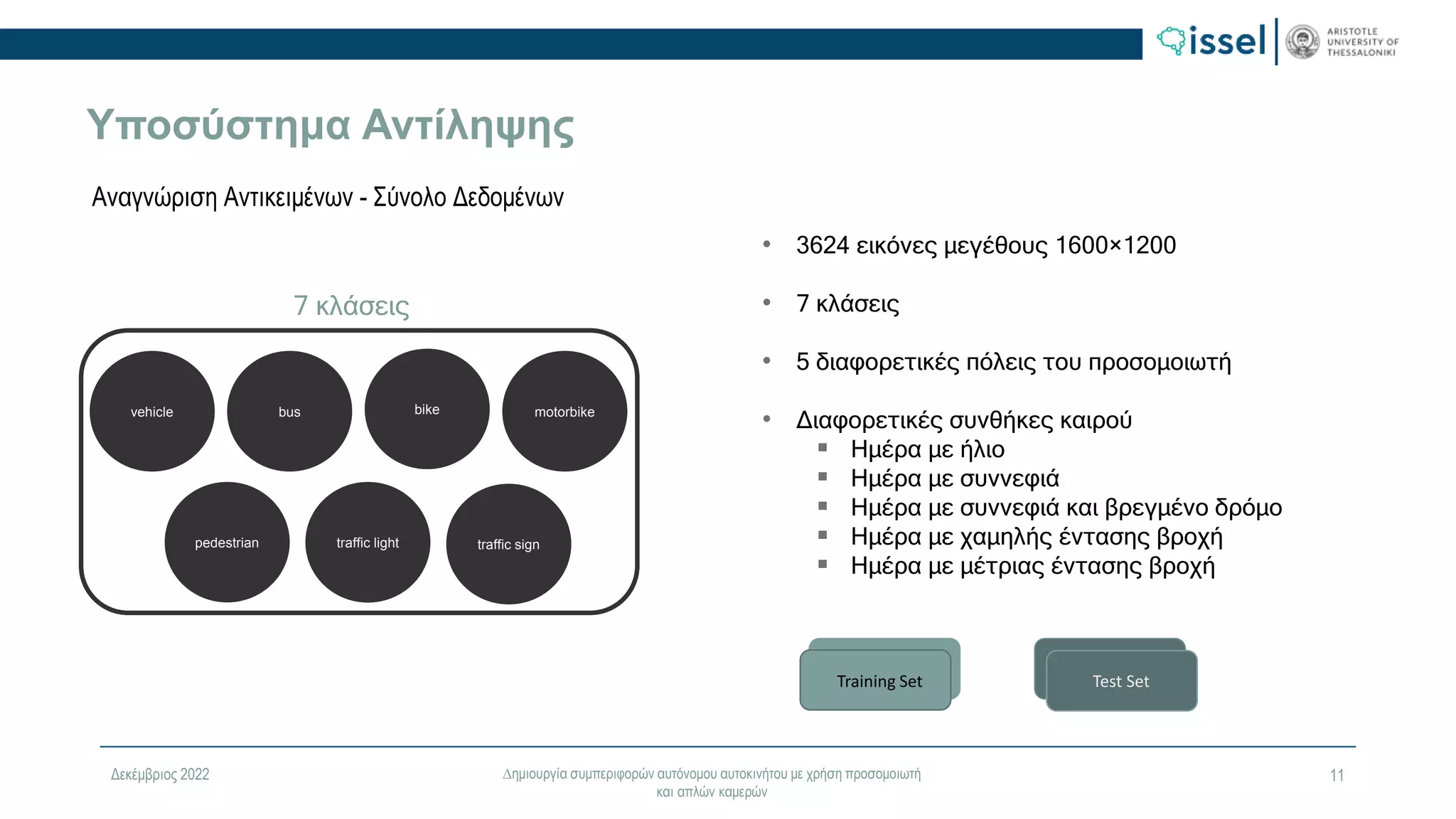








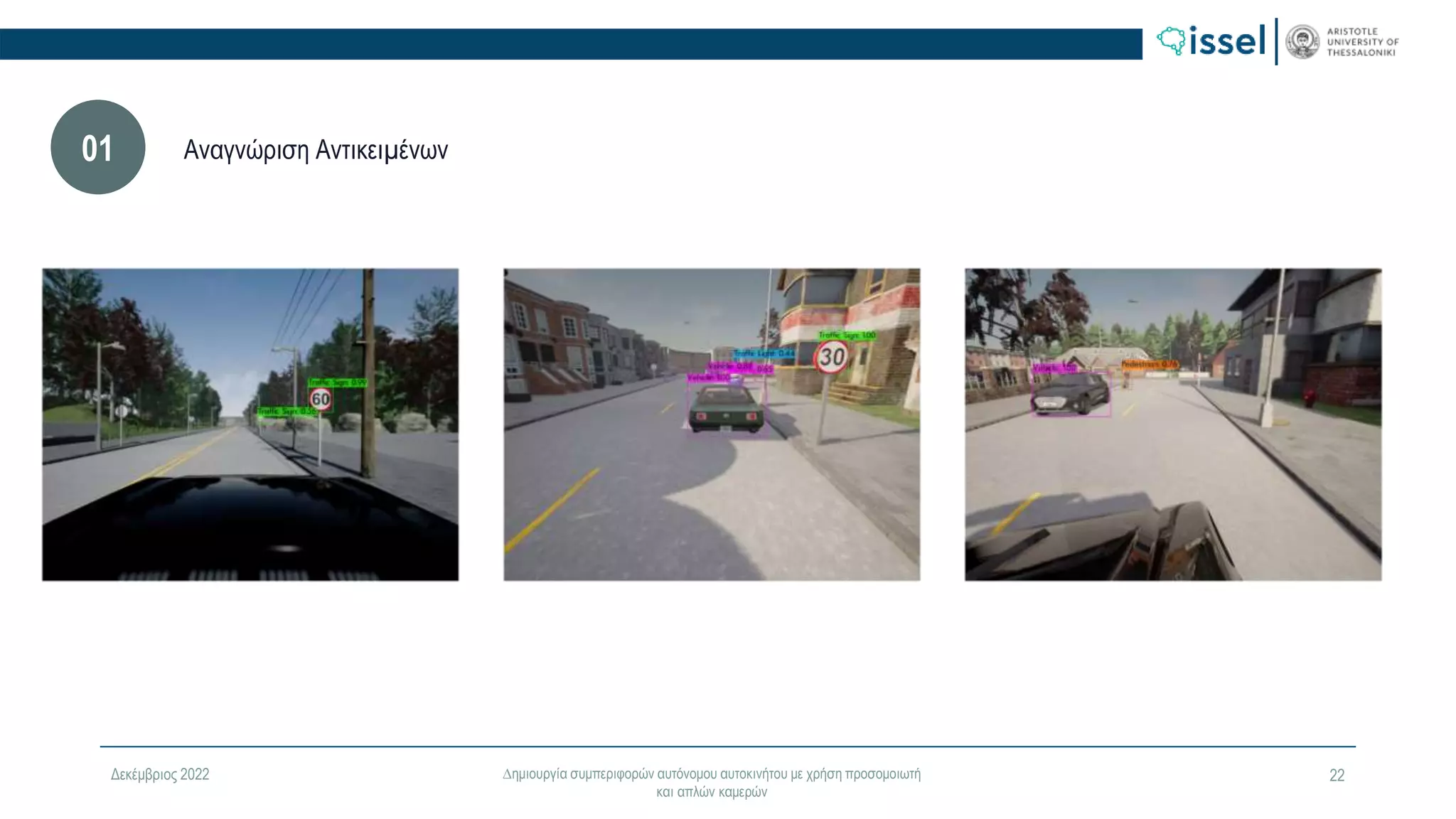







Η αυτόνοµη οδήγηση είναι µια τεχνολογία η οποία αναπτύσσεται και εξελίσσεται ϱαγδαία τα τελευταία χρόνια. Τόσο η επιστηµονική κοινότητα όσο και οι κατασκευάστριες εταιρίες καταβάλλουν αξιοσηµείωτες προσπάθειες για την ανάπτυξη της τεχνολογίας προς την επίτευξη της αυτόνοµης οδήγησης. Η αυτόνοµη τεχνολογία οχηµάτων θα µπορεί να είναι σε θέση να παρέχει ορισµένα πλεονεκτήµατα σε σύγκριση µε τα παραδοσιακά οχήµατα, καθώς στα επόµενα χρόνια, θα αυξήσει δραµατικά την ασφάλεια των πολιτών, θα µειώσει το χρόνο των µεταφορών αλλά και την κυκλοφοριακή συµφόρηση των δρόµων, συντελώντας στην εύρυθµη λειτουργία του κυκλοφοριακού συστήµατος. Για την επίτευξη µια τέτοιας πραγµατικότητας είναι απαραίτητη η αντίληψη του χώρου γύρω από το αυτόνοµο όχηµα, η προσαρµογή του στο περιβάλλον και η άµεση απόκρισή του σε αλλαγές αυτού. Το όχηµα θα πρέπει να πλοηγείται µε ασφάλεια στο οδικό δίκτυο και να ανταποκρίνεται ανάλογα, αναγνωρίζοντας τόσο τα στατικά και όσο και τα δυναµικά εµπόδια. Επιπλέον, θα πρέπει να υπολογίζει και να αξιολογεί σενάρια αποφάσεων και να επιλέγει την κατάλληλη ανταπόκριση σύµφωνα µε τις συνθήκες. ΄Ετσι, τα αυτόνοµα οχήµατα θα πρέπει να είναι εξοπλισµένα µε εξειδικευµένους αισθητήρες και µε το κατάλληλο σύστηµα ελέγχου και λήψης αποφάσεων. Η παρούσα διπλωµατική εργασία εστιάζει στον σχεδιασµό και την υλοποίηση ενός τέτοιου συστήµατος ικανού να πλοηγείται αυτόνοµα σε προσπελάσιµο δρόµο αφού τον αναγνωρίσει επιτυχώς, κάνοντας χρήση οπτικής πληροφορίας που λαµβάνεται από RGB κάµερα, η οποία είναι ενσωµατωµένη στο όχηµα. Το όχηµα κινείται σε προσοµοιωµένο περιβάλλον, και συγκεκριµένα στον προσοµοιωτή CARLA. Γίνεται εκτενής χρήση συναρτήσεων της βιβλιοθήκης Υπολογιστικής Όρασης OpenCV για την διαµόρφωση και αξιοποίηση της ληφθείσας οπτικής πληροφορίας. Για την αναγνώριση των δυναµικών εµποδίων η οπτική πληροφορία αναλύεται από το µοντέλο βαθιάς µάθησης YOLO (You Only Look Once), ενώ χρησιµοποιείται Οπτική Αναγνώριση Χαρακτήρων (OCR) για την εξαγωγή πληροφορίας από τα σήµατα οδικής κυκλοφορίας και γίνεται ανάλυση ιστογράµµατος για Αναγνώριση Χρώµατος (Color Recognition) των ϕωτεινών σηµατοδοτών. Για την κατασκευή βασικού µονοπατιού δηµιουργείται ένας κατευθυνόµενος γράφος του χάρτη και χρησιµοποιείται ο αλγόριθµος Α* για την αναζήτηση της βέλτιστης διαδροµής. Τέλος, η πλοήγηση επιτυγχάνεται µε ένα σύστηµα διατήρησης των λωρίδων (Lane Keeping Assist System) και τη χρήση ενός PID ελεγκτή.