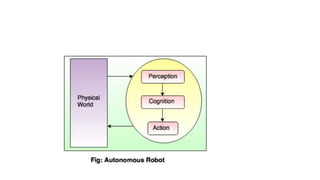
Perception in AI involves interpreting sensory information from the real world, such as sight and sound, and organizing it to inform actions. Planning involves decision making and choosing sequences of actions to achieve goals. The components of a planning system include applying rules to compute new problem states, detecting solutions and dead ends, and using techniques like goal stack planning and non-linear planning.