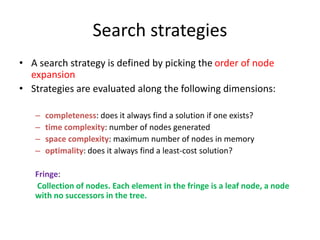
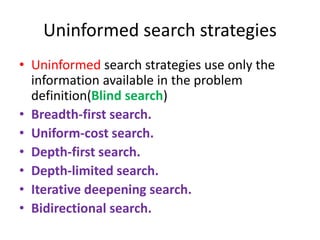
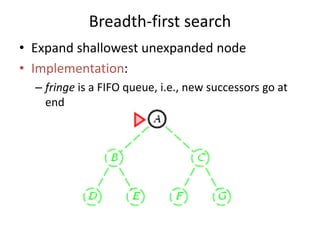
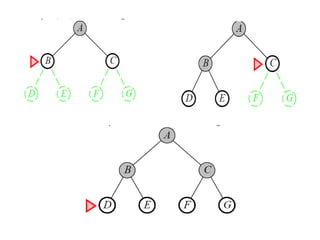
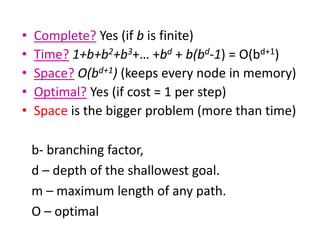
The document provides an overview of foundations of artificial intelligence including definitions of AI, different views of AI, and capabilities required for a computer to pass a total Turing test. It discusses thinking humanly by modeling human cognition and thinking rationally using logic. It describes acting humanly using the Turing test and acting rationally by being a rational agent that takes actions to achieve goals. The document also covers applications of AI, types of environments and agents, and different approaches to machine learning including reflex agents, model-based agents, goal-based agents, and utility-based agents.
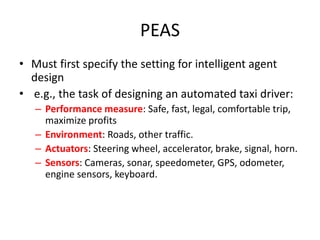
![Agents and environments
• The agent function maps from percept histories to
actions:
[f: P* A]
• The agent program runs on the physical architecture
to produce f
• agent = architecture + program](https://image.slidesharecdn.com/unit1-240107141031-131296cc/85/Unit-1-ppt-17-320.jpg)
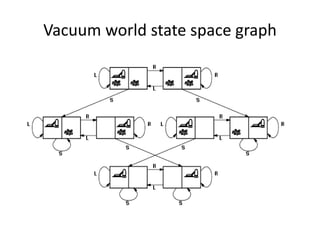
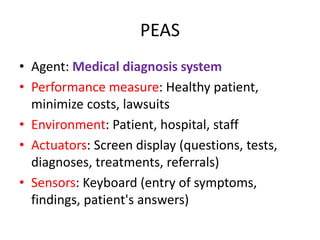
![Vacuum-cleaner world
• Percepts: location and contents, e.g., [A,Dirty]
• Actions: Left, Right, Suck, NoOp](https://image.slidesharecdn.com/unit1-240107141031-131296cc/85/Unit-1-ppt-18-320.jpg)
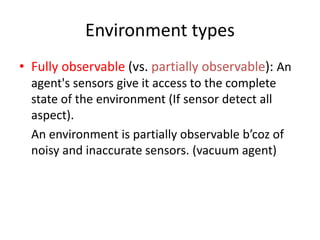
![A vacuum-cleaner agent
Percept sequence Action
[A, Clean] Right
[A, Dirty] Suck
[B,Clean] Left
[B,Dirty] Suck](https://image.slidesharecdn.com/unit1-240107141031-131296cc/85/Unit-1-ppt-19-320.jpg)
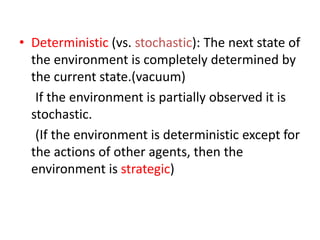
![Simple Reflex agent
Function REFLEX_VACUUM-AGENT[location,status]returns an
action
If status=Dirty then return suck
else if location=A then return Right
else if location=B then return Left](https://image.slidesharecdn.com/unit1-240107141031-131296cc/85/Unit-1-ppt-35-320.jpg)
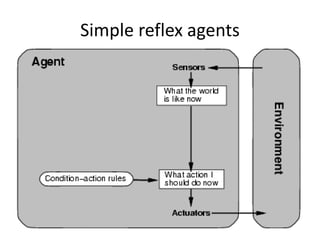
![Simple reflex agents
fnuction SIMPLE-REFLEX-AGENT(percept)returns an action
static rules,a set of condition-action rules
state INTERPRET-INPUT(percept)
rule RULE-MATCH(state,rules)
action RULE-ACTION[rule]
return action](https://image.slidesharecdn.com/unit1-240107141031-131296cc/85/Unit-1-ppt-37-320.jpg)
![Model-based reflex agents
fnuction REFLEX-AGENT-WITH STATE(percept)returns an
action
static: state,a description of the current world state
rules,a set of condition-action rules
action ,the most recent action,initially none
state UPDATE-STATE(state,action,percept)
rule RULE-MATCH(state,rules)
action RULE-ACTION[rule]
return action](https://image.slidesharecdn.com/unit1-240107141031-131296cc/85/Unit-1-ppt-40-320.jpg)