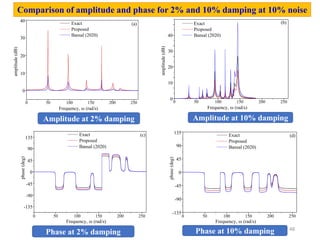
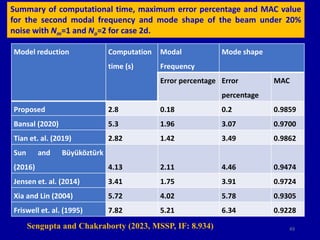
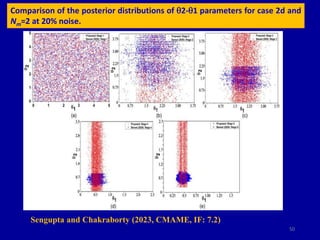
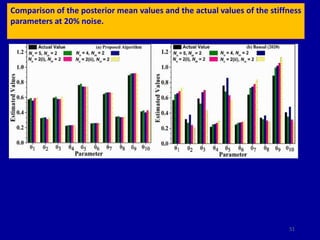
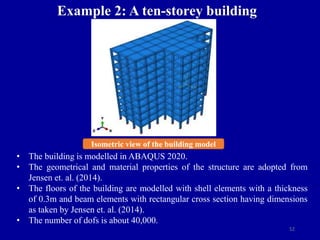
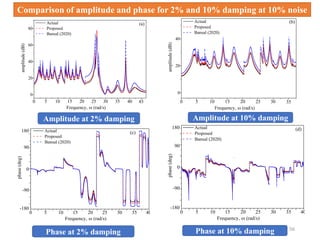
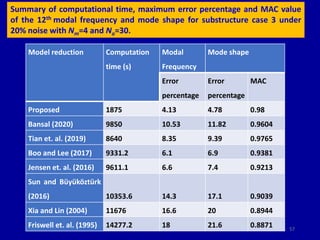
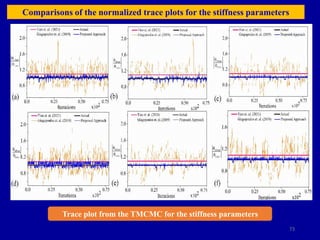
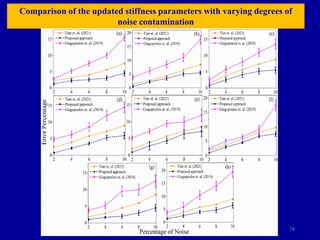
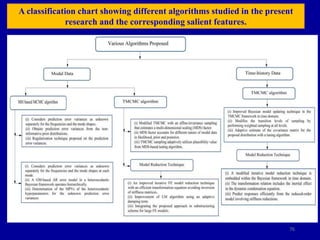
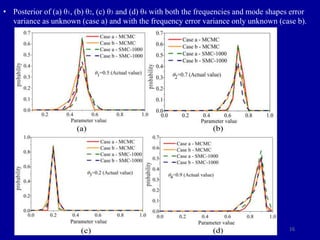
The document describes Bayesian model updating research using adaptive Bayesian filters and data-centric approaches. It outlines previous contributions, future research plans, and short-term objectives. The focus is on Bayesian updating with MCMC and TMCMC approaches to more accurately and efficiently update model parameters. Model reduction techniques are proposed in the frequency domain and time domain to address incomplete measured responses. Numerical studies on a shear building model demonstrate that the Bayesian updating algorithm can estimate parameters well when using 45 data sets and hyperparameters of 0.001, 0.001, with a maximum error of 2.5%.

![8
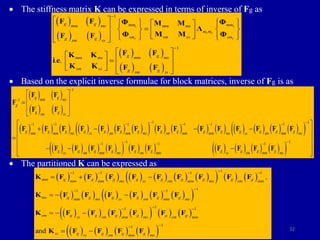
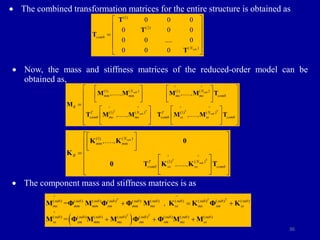
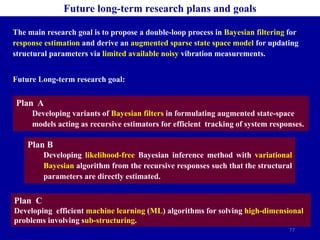
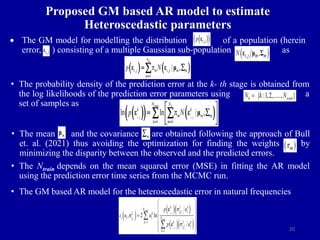
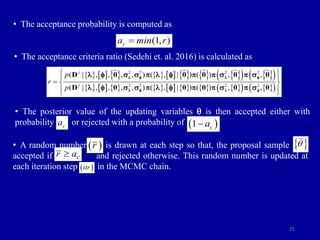
• The likelihood of outcome (D= w, f) for a parameter vector q:
2
2
ˆ
[ ( )]
1
( | ) exp
2
2 i
i
i i
i
p
w
w
w w
w
θ
θ
σ
σ
1
/2 1/2
1 1
( | ) exp ( ) ( )
(2 ) 2 i
i
T
i i i
i i
n
p
θ V θ
V
f
f
f q f f f f
• The covariance matrix of mode shapes is as
where, is the variance of the mode shapes.
• The variance of mode shapes from dynamic test data is as:
2 2
, ,
1 1
1 1
ˆ ˆ
|| ||
i
J J
i j i j
j j
σ
Jm J
f f f
• The final representation of likelihood function is as:
2 2
1
( | ) ( | , ) ( | , ) ( | ) ( | )
i i i i i
m
i
i
p p p p p
D θ θ θ V θ V θ
w f w f
w f
2
i i
f f
V I
o o
n n
R
I
2
i
f
where,](https://image.slidesharecdn.com/parthasengupta-240402105237-a6a271f6/85/Partha-Sengupta_structural-analysis-pptx-8-320.jpg)
![15
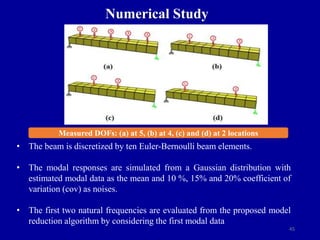
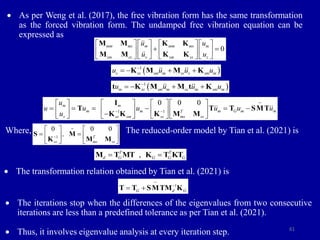
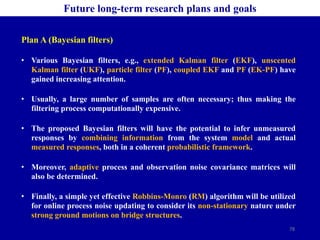
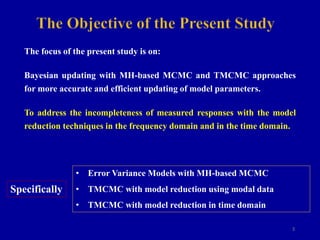
Actual
values
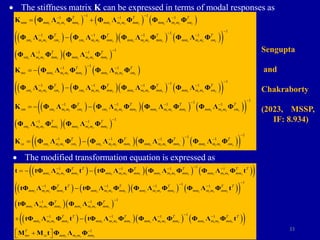
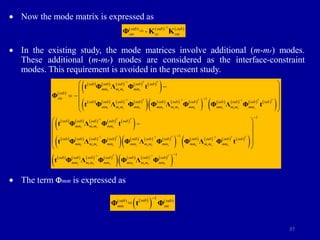
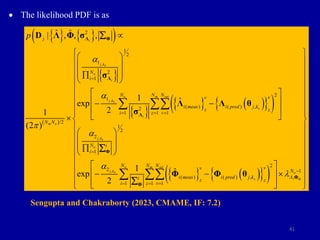
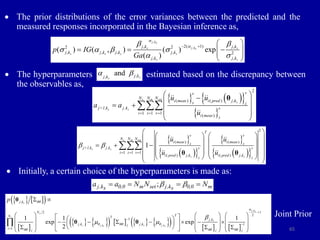
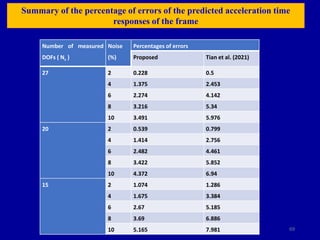
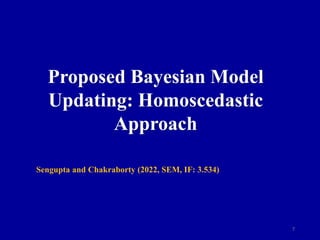
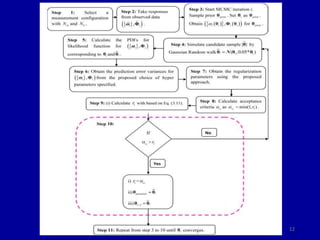
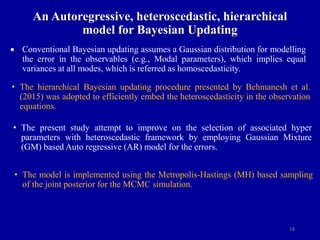
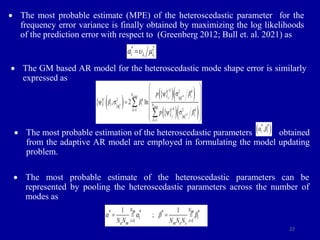
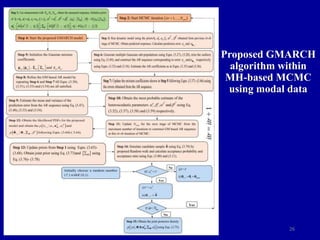
The posterior mean, standard deviation and percentage of errors (in square bracket) of
the parameters for different choice of hyper parameters and different data sets
(a,b) = (0.1,0.1) (a,b) = (0.01,0.01) (a,b) = (0.001,0.001)
15 sets 30sets 45sets 15sets 30sets 45sets 15sets 30sets 45sets
=0.5 0.55,0.11
[10.6]
0.54, 0.11
[7.1]
0.52,0.10
[4.6]
0.45,0.10
[9.1]
0.46, 0.09
[7.1]
0.48,0.08
[4.0]
0.48, 0.05
[3.8]
0.49, 0.05
[1.7]
0.49,0.04
[0.5]
=0.7 0.63,0.10
[9.8]
0.66,0.09
[5.1]
0.67,0.09
[3.1]
0.76,0.08
[8.7]
0.75,0.08
[8.2]
0.74,0.07
[6.5]
0.72,0.07
[3.5]
0.71,0.07
[1.8]
0.71,0.07
[1.5]
=0.2 0.24,0.05
[18.8]
0.22,0.04
[12.2]
0.21,0.04
[5.1]
0.22,0.04
[11.6]
0.22,0.04
[10.7]
0.21,0.04
[6.25]
0.22,0.04
[10.2]
0.21,0.04
[5.1]
0.20, 0.03
[2.5]
=0.9 0.79,0.14
[11.6]
0.79,0.14
[11.6]
0.82,0.13
[8.7]
0.95,0.09
[6.0]
0.93,0.07
[3.8]
0.93,0.05
[3.2]
0.85,0.08
[5.2]
0.87,0.08
[3.1]
0.88,0.07
[2.2]
=0.6 0.63,0.10
[5.8]
0.63,0.09
[4.6]
0.61,0.08
[2.0]
0.62,0.08
[3.6]
0.61,0.08
[2.2]
0.61,0.07
[1.7]
0.62,0.06
[4.0]
0.61,0.06
[2.0]
0.60,0.05
[0.2]
=1.0 0.88,0.12
[11.7]
0.91,0.11
[8.9]
0.93,0.10
[7.3]
0.90,0.11
[9.8]
0.91,0.10
[8.7]
0.93,0.09
[6.8]
0.95,0.08
[4.5]
0.97,0.08
[2.9]
0.98,0.07
[1.9]
=0.8 0.75,0.09
[6.1]
0.77,0.09
[3.2]
0.79,0.05
[1.0]
0.84,0.05
[5.1]
0.84,0.05
[4.4]
0.82,0.05
[2.7]
0.75,0.01
[5.8]
0.77,0.08
[3.6]
0.78,0.08
[2.2]
=0.4 0.34,0.14
[15.6]
0.35,0.13
[11.4]
0.38,0.12
[4.7]
0.42,0.07
[6.8]
0.42,0.06
[5.4]
0.41,0.06
[2.8]
0.41,0.06
[4.7]
0.41,0.06
[4.4]
0.41,0.05
[2.4]
Comparison of actual and predicted parameters
• It can be noted that the posterior mean values are well estimated at 45 data sets with hyper
parameter values of (0.001, 0.001) with maximum error percentage of 2.5% for .
3
q](https://image.slidesharecdn.com/parthasengupta-240402105237-a6a271f6/85/Partha-Sengupta_structural-analysis-pptx-15-320.jpg)
![21
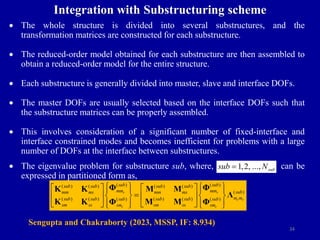
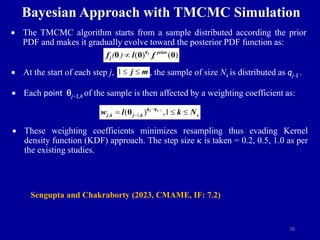
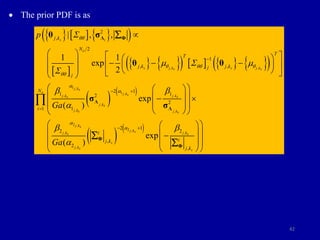
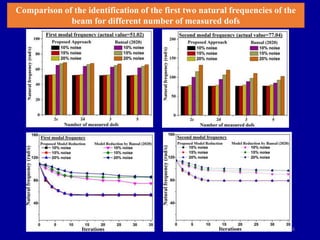
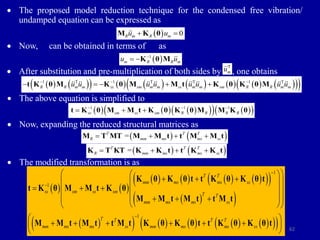
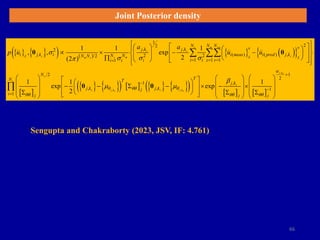
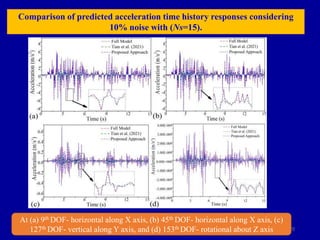
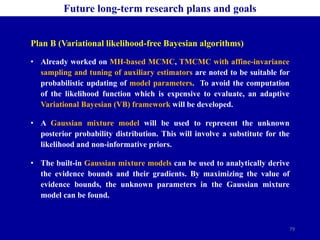
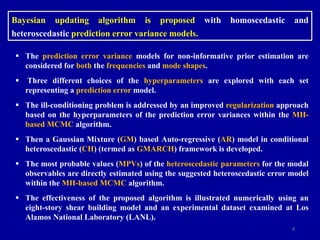
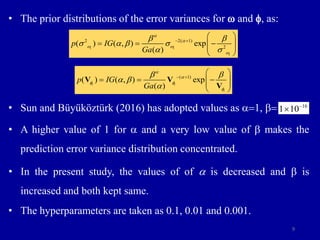
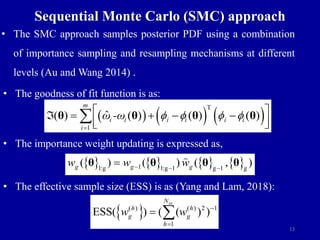
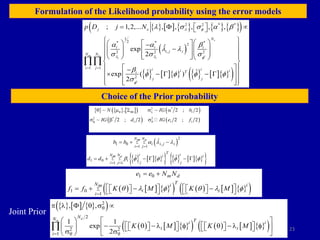
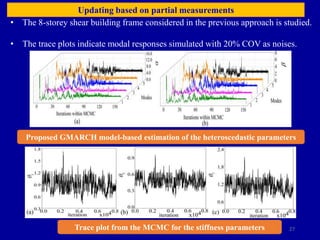
The mean and the variance of the prediction error for the natural frequencies
become
The outliers in the prediction errors are suitably trimmed using a methodology
for outlier detection from the probability of individual data points by Yuen and
Mu (2012)
An expected Bayesian loss for the adaptive AR model considering the number
of measured DOFs (No) is as
A confidence level cL is selected for use in a chi-square distribution
approximated from , denoted as
The AR model is adaptively refined till
train train
i
N N
k k k
i 1 i 1 i
k 1 k 1
2 ( ( ) ( ))
a a a
train train train
i
N N N
2
k k k k
i 2 i i 2 i
k 1 k 1 k 1
4 ( ( ) ( ( ))
a a a a
1
1 [1/( 1)]
1 1
2 2 train
k N
m i
i
i
i
2
N i i
s s
i 1
ε ,
LR 2(N 1) (N 1)
a
m
i
i
i
N
i 1
s
1
(N 1)
i
LR
2
( 1),
s
N
2
( 1),
i i s
N
LR
](https://image.slidesharecdn.com/parthasengupta-240402105237-a6a271f6/85/Partha-Sengupta_structural-analysis-pptx-21-320.jpg)
![30
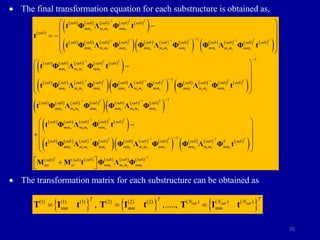
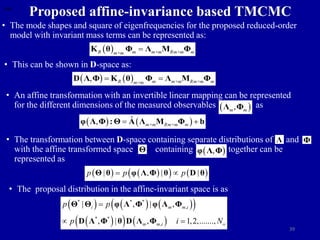
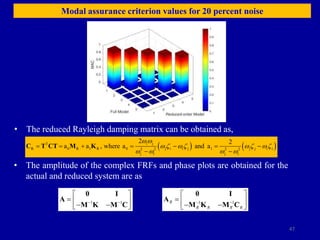
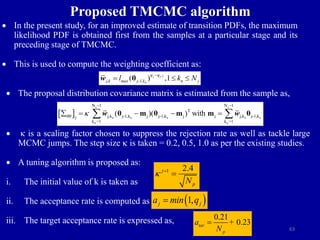
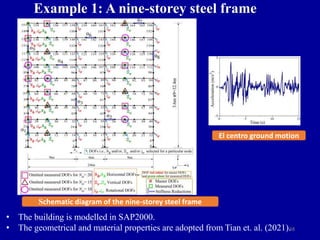
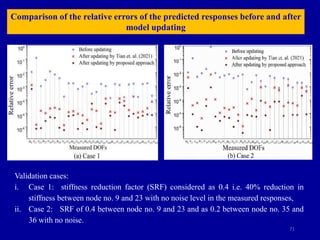
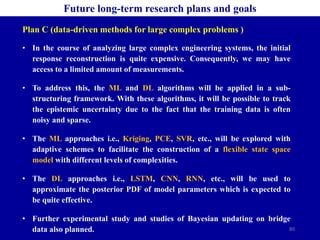
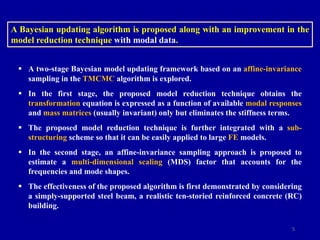
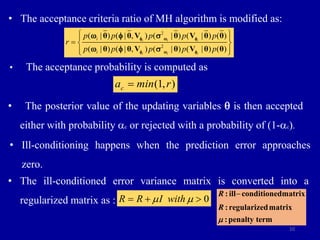
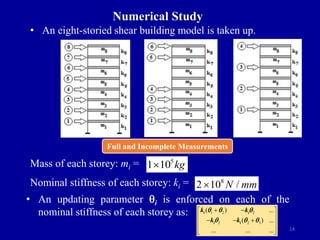
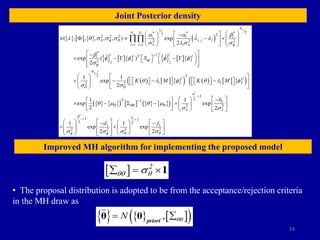
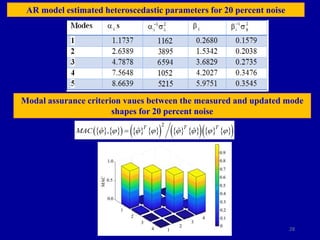
Model Reduction Formulation
The generalized n-DOF linear system with M and K(θ) governed
by number of master (m) and slave (s) DOFs is as:
The mode matrix for sm in terms of mm is as:
The resulting equation for transformation parameter t is as:
Transformation matrix T is as:
The reduced M and K(θ) are as:
( ) ( )
( ) ( )
mm ms mm mm
mm
sm ss sm sm
mm ms
sm ss
K θ K θ Φ M M Φ
Λ
K θ K θ Φ M M Φ
sm mm
Φ tΦ
1 1 1
( ) ( ) ( )[ ]
T
ss ms ss ms ss mm mm mm
T
t K θ K θ K θ M M t Φ Λ Φ
T T
R R
and ( ) ( )
M T MT K θ T K θ T
T
T I t](https://image.slidesharecdn.com/parthasengupta-240402105237-a6a271f6/85/Partha-Sengupta_structural-analysis-pptx-30-320.jpg)
![31
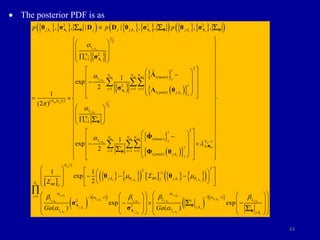
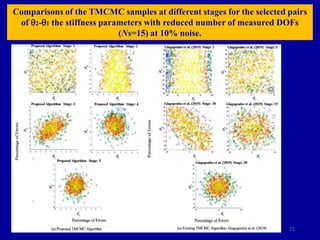
The mode shape representing slave dofs s in terms of master dofs m for mr
number of modes m<< mr as
The mode matrix is formulated as:
The resulting formulation is as:
Proposed Transformation Formulation
The flexibility matrix of a global structure, Fg can be obtained from its
vibration properties as,
1
F Φ Λ Φ
T
g d d d
Fg can be expressed for first mr modes as,
1 1
1
1 1
r r r r r r
r r r
r r r r r r
T T
g g
mm m mm mm m sm mm ms
T
g m m m T T
sm m mm sm m sm g g
sm ss
F F
Φ Λ Φ Φ Λ Φ
F Φ Λ Φ
Φ Λ Φ Φ Λ Φ F F
r r
sm mm
Φ tΦ
r r
mm sm
T
Φ Φ Φ
1 1 1
( ) ( ) ( )[ ] r r r
ss ms ss ms ss mm mm mm
T T
t K θ K θ K θ M M t Φ Λ Φ](https://image.slidesharecdn.com/parthasengupta-240402105237-a6a271f6/85/Partha-Sengupta_structural-analysis-pptx-31-320.jpg)