Download as PDF, PPTX
![General Formulation
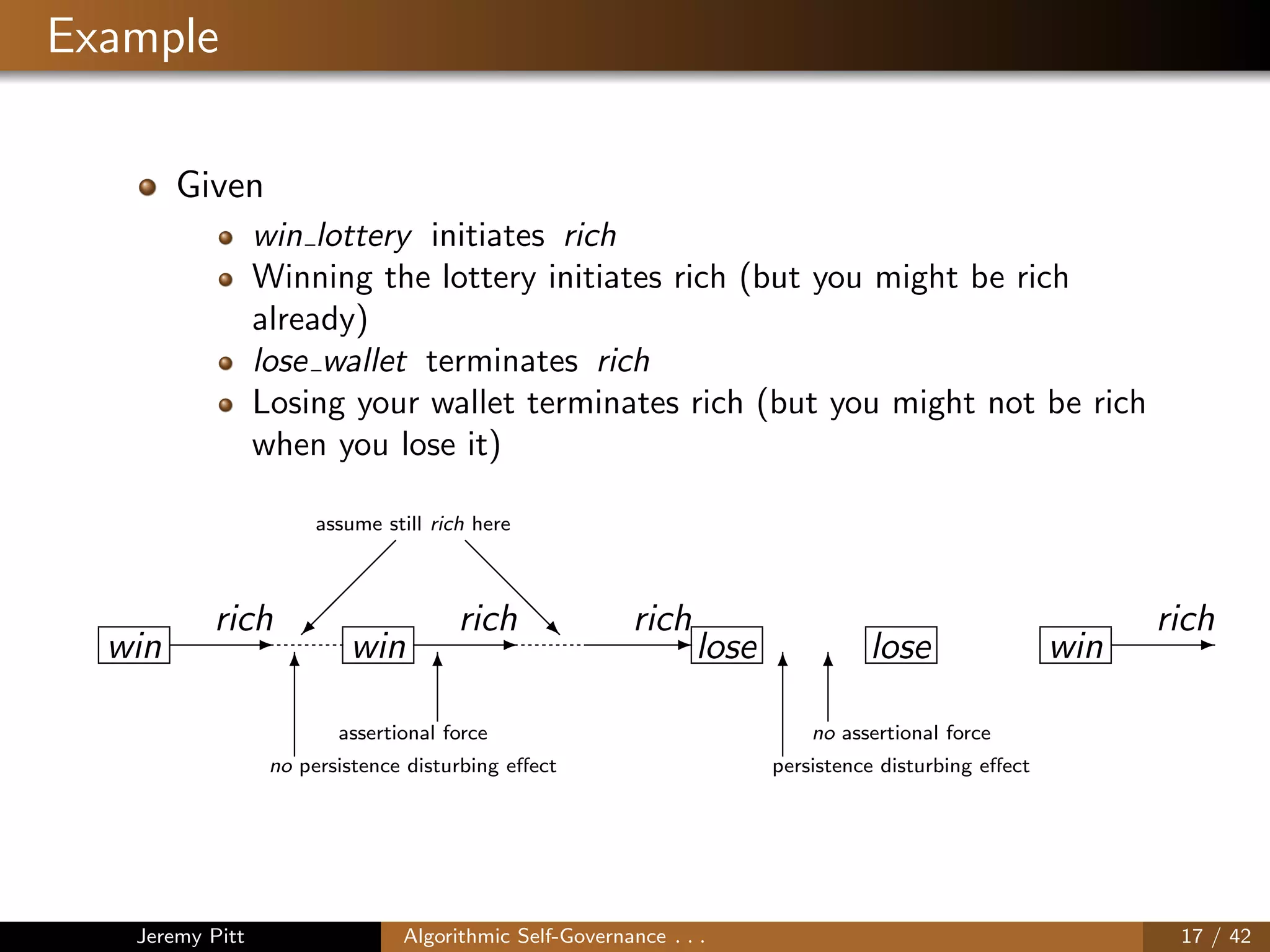
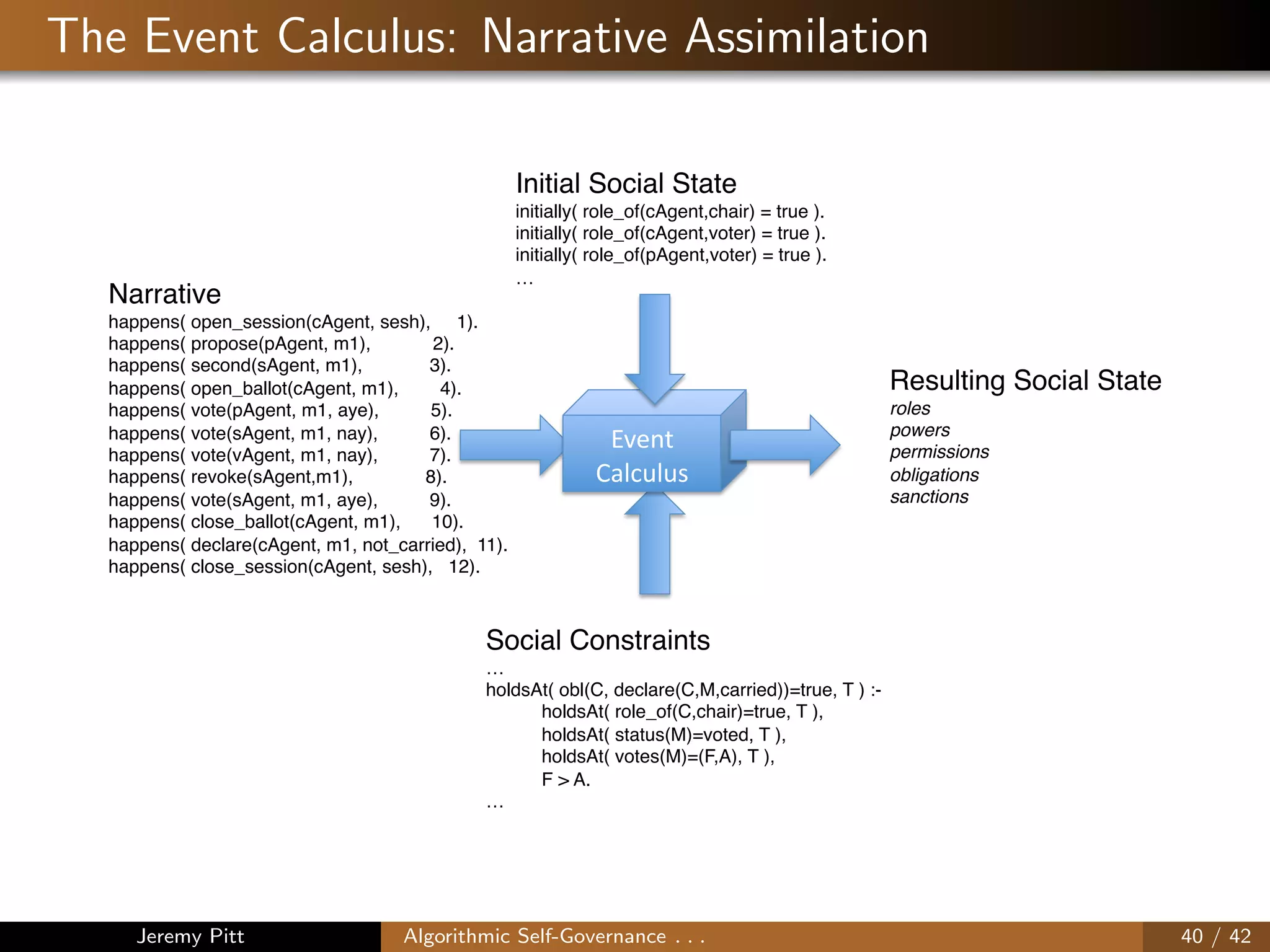
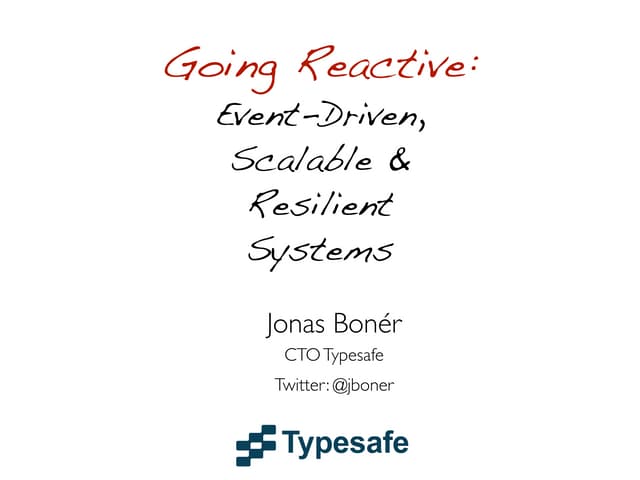
The narrative (what happens when) is represented by:
initially F
Fluent F holds at the initial time point (usually 0)
E happensat T
Event/action of type E occurred/happened at time T
The effects of actions are represented by:
E initiates F at T
The occurrence of event of type E at time T starts a period
of time for which fluent F holds
E terminates F at T
The occurrence of event of type E at time T ends a period of
time for which fluent F holds
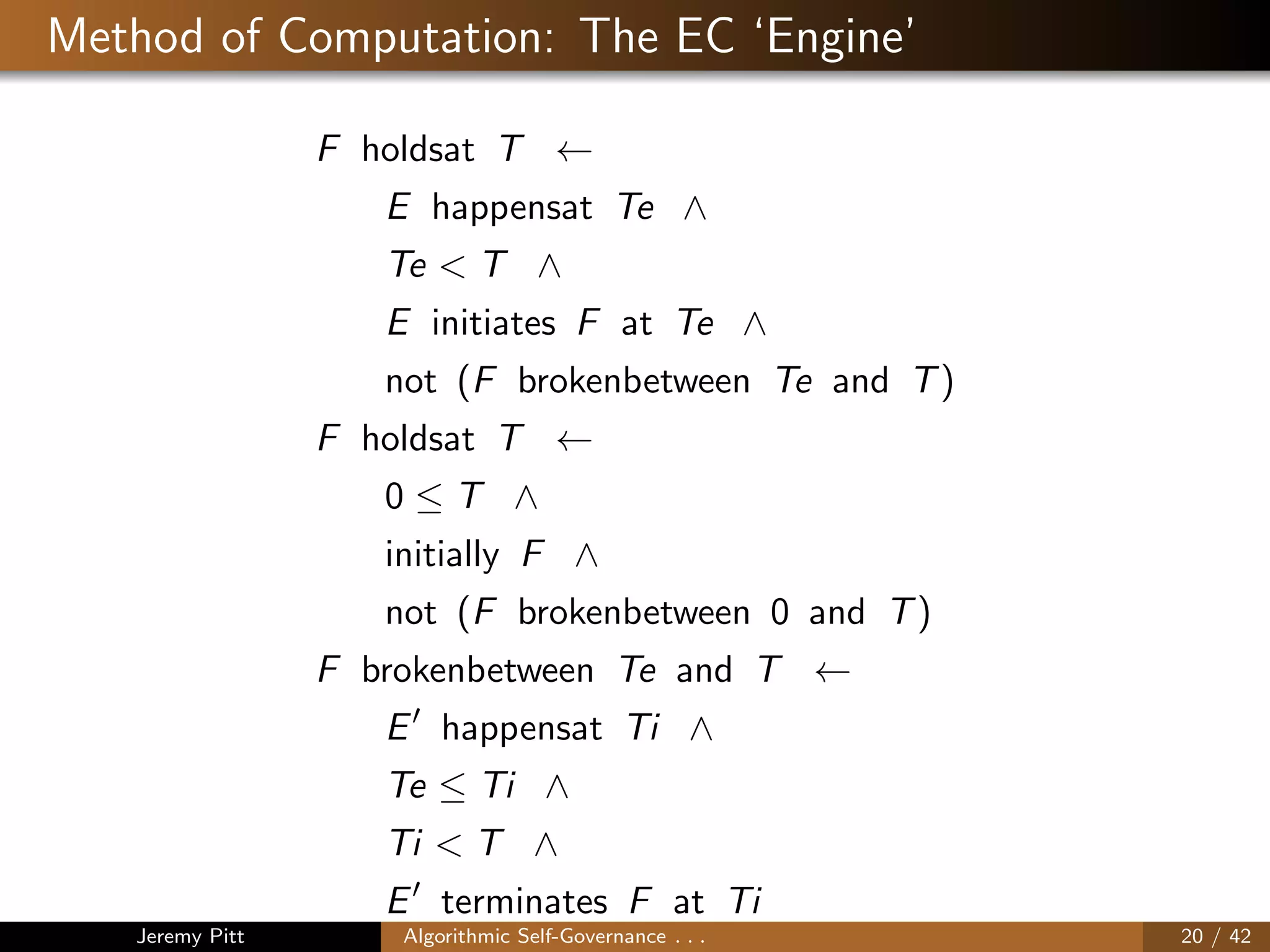
The general query:
F holdsat T
Fluent F holds at time T
F holdsfor P
Fluent F holds for time period P (P is of the form (T1, T2])
Jeremy Pitt Algorithmic Self-Governance . . . 19 / 42](https://image.slidesharecdn.com/t1algselfgov-140725070304-phpapp02/75/Part-1-Algorithmic-Self-Governance-19-2048.jpg)
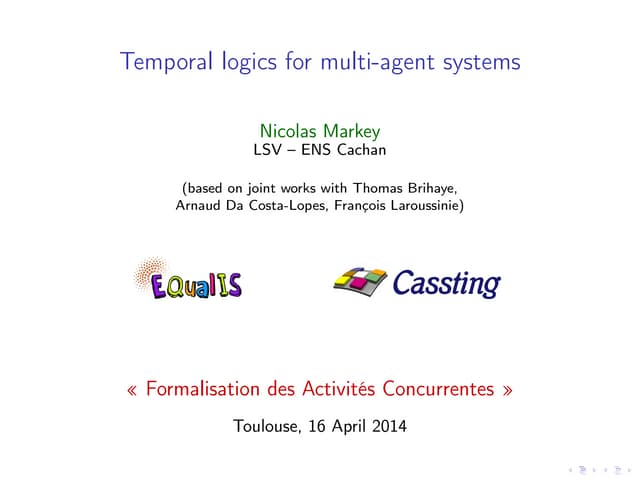
![Sanction
The chair always has the power to close a ballot
It has permission to exercise the power only after some time
has elapsed
If it closes the ballot early, it may be sanctioned
close ballot(C, M) initiates sanction(C) = [(102, M)|S] at T ←
role of (C, chair) = true holdsat T ∧
per(C, close ballot(C, M)) = false holdsat T ∧
sanction(C) = S holdsat T
The sanction results in penalty only if someone objects
Feature of RONR: ‘anything goes unless someone objects’
Jeremy Pitt Algorithmic Self-Governance . . . 38 / 42](https://image.slidesharecdn.com/t1algselfgov-140725070304-phpapp02/75/Part-1-Algorithmic-Self-Governance-38-2048.jpg)

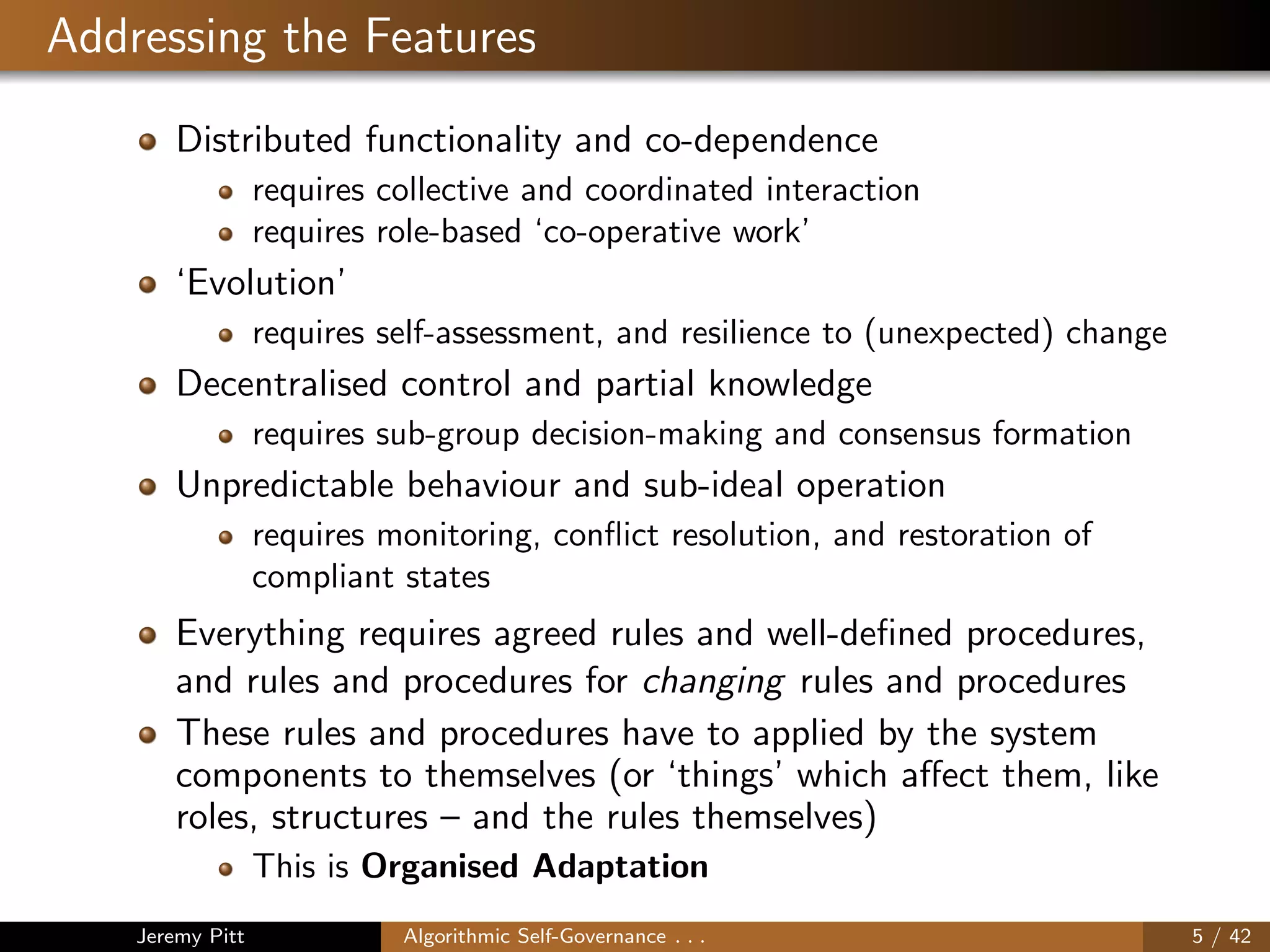
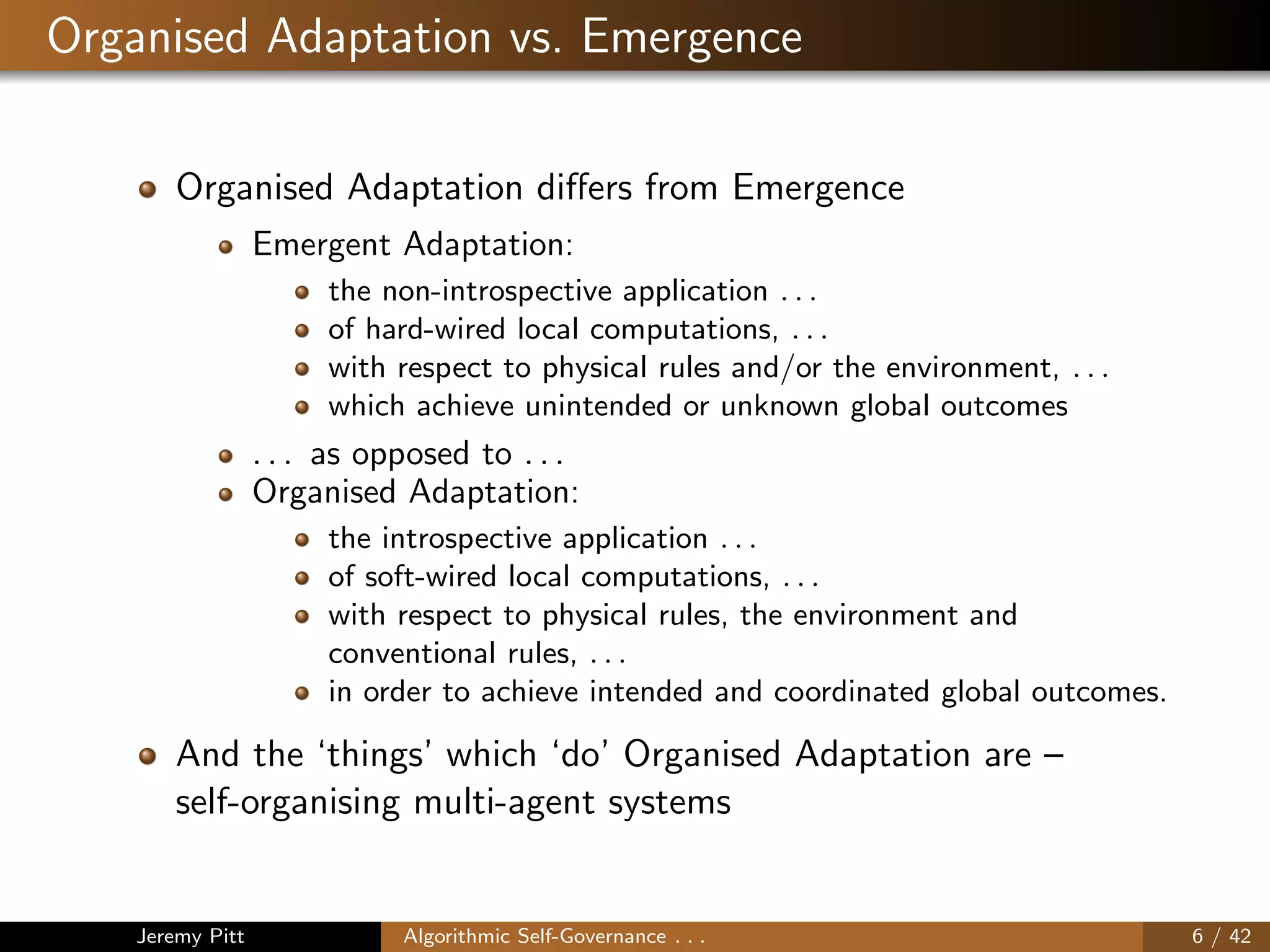
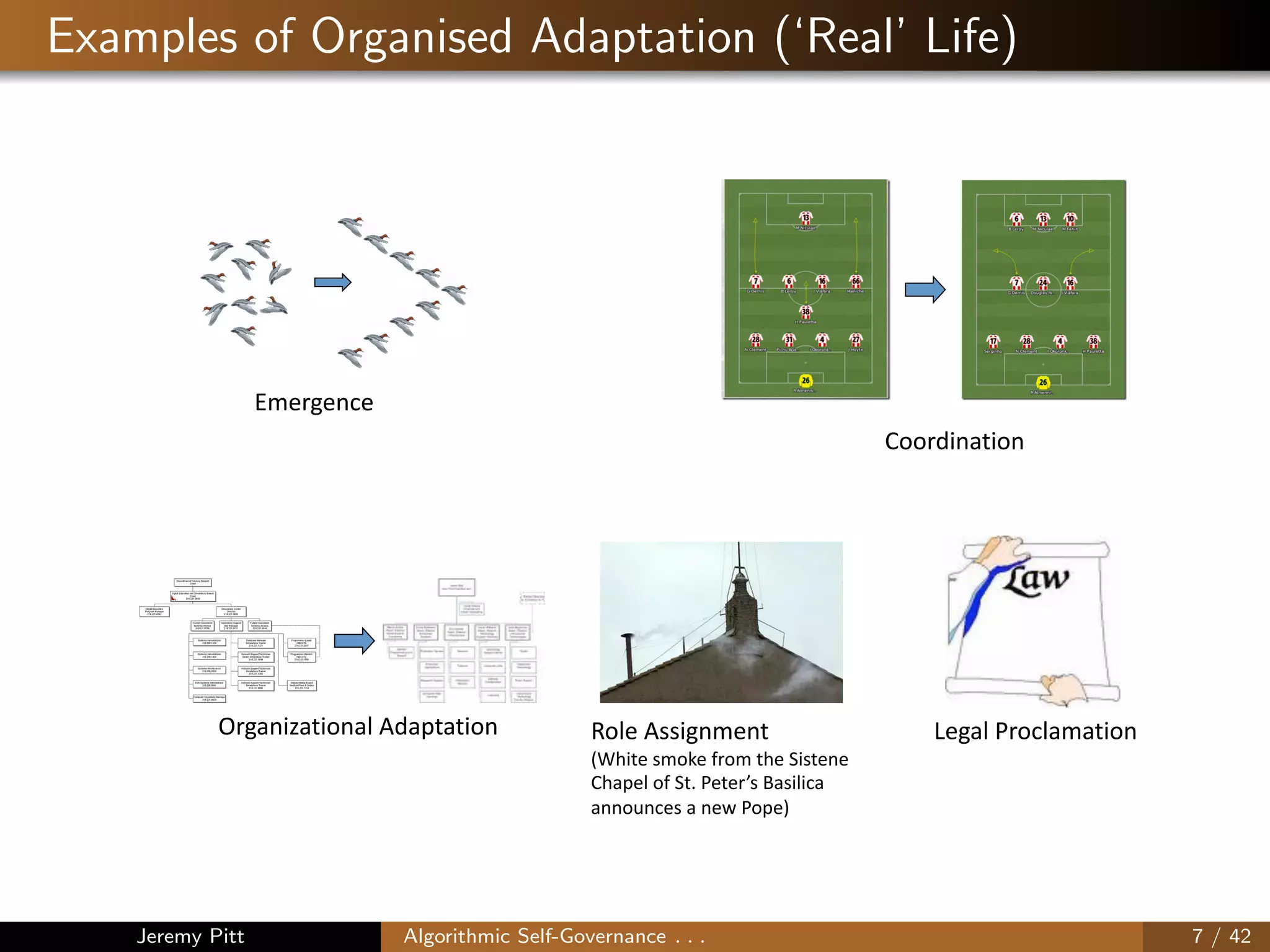
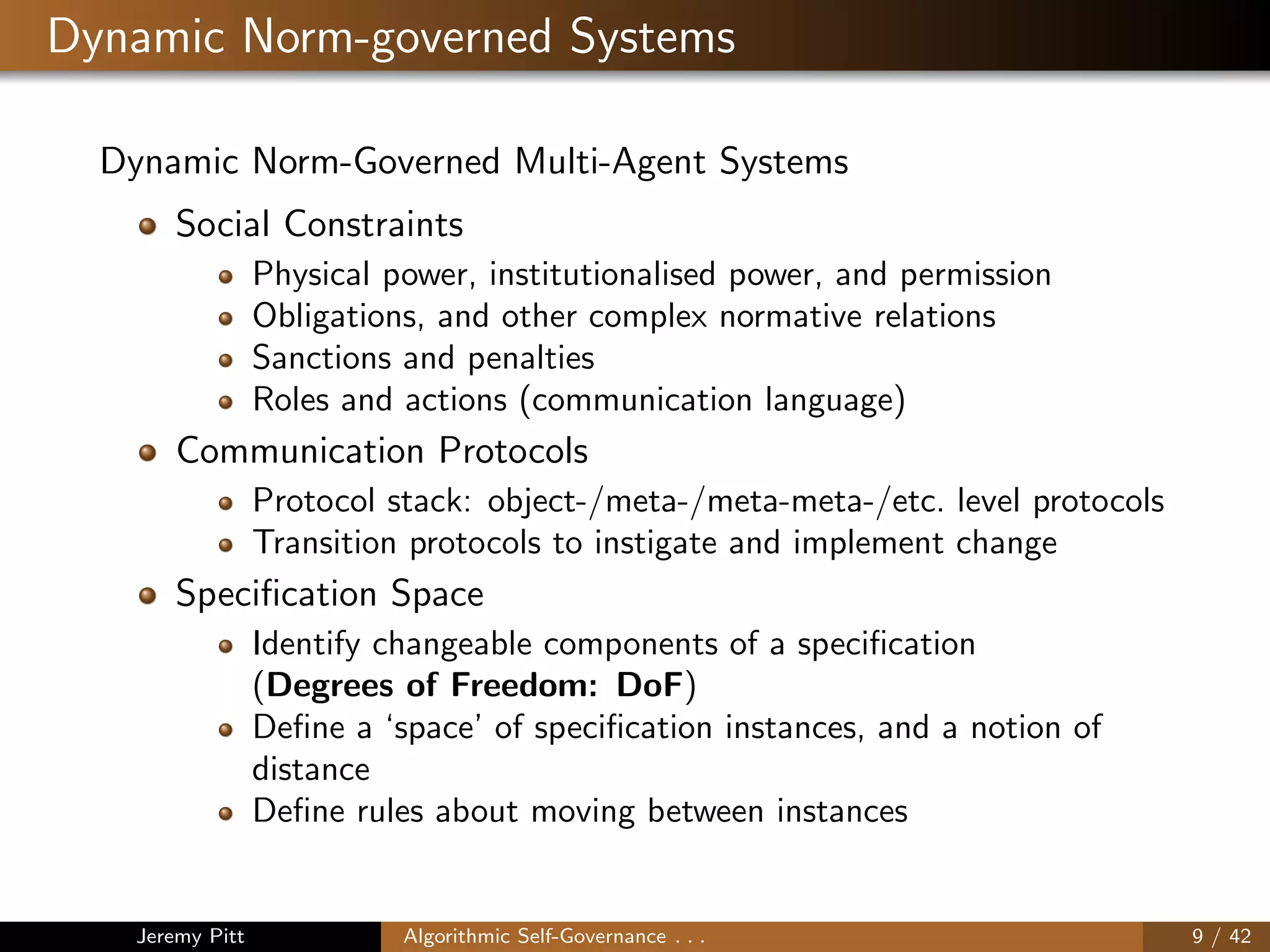
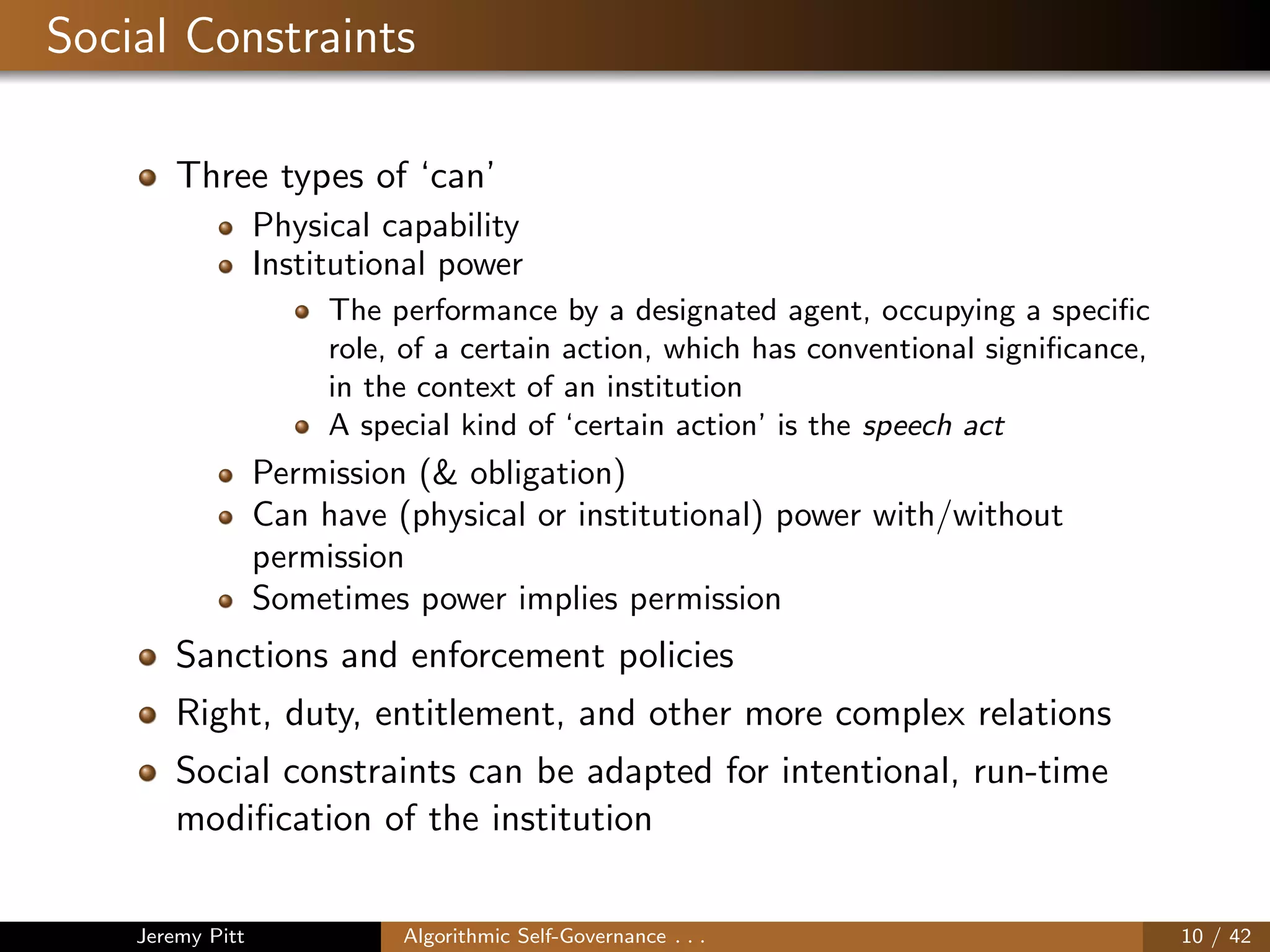
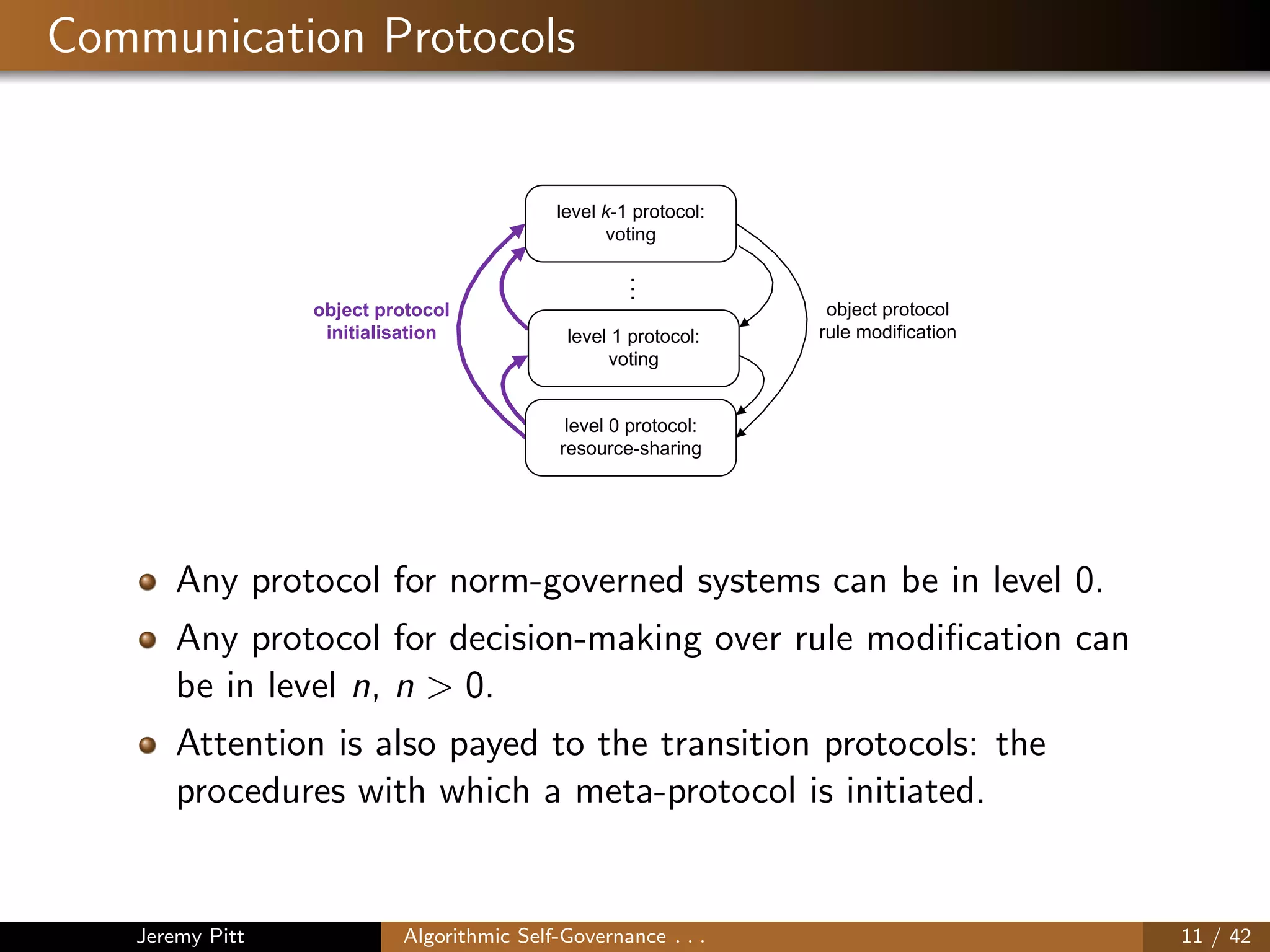
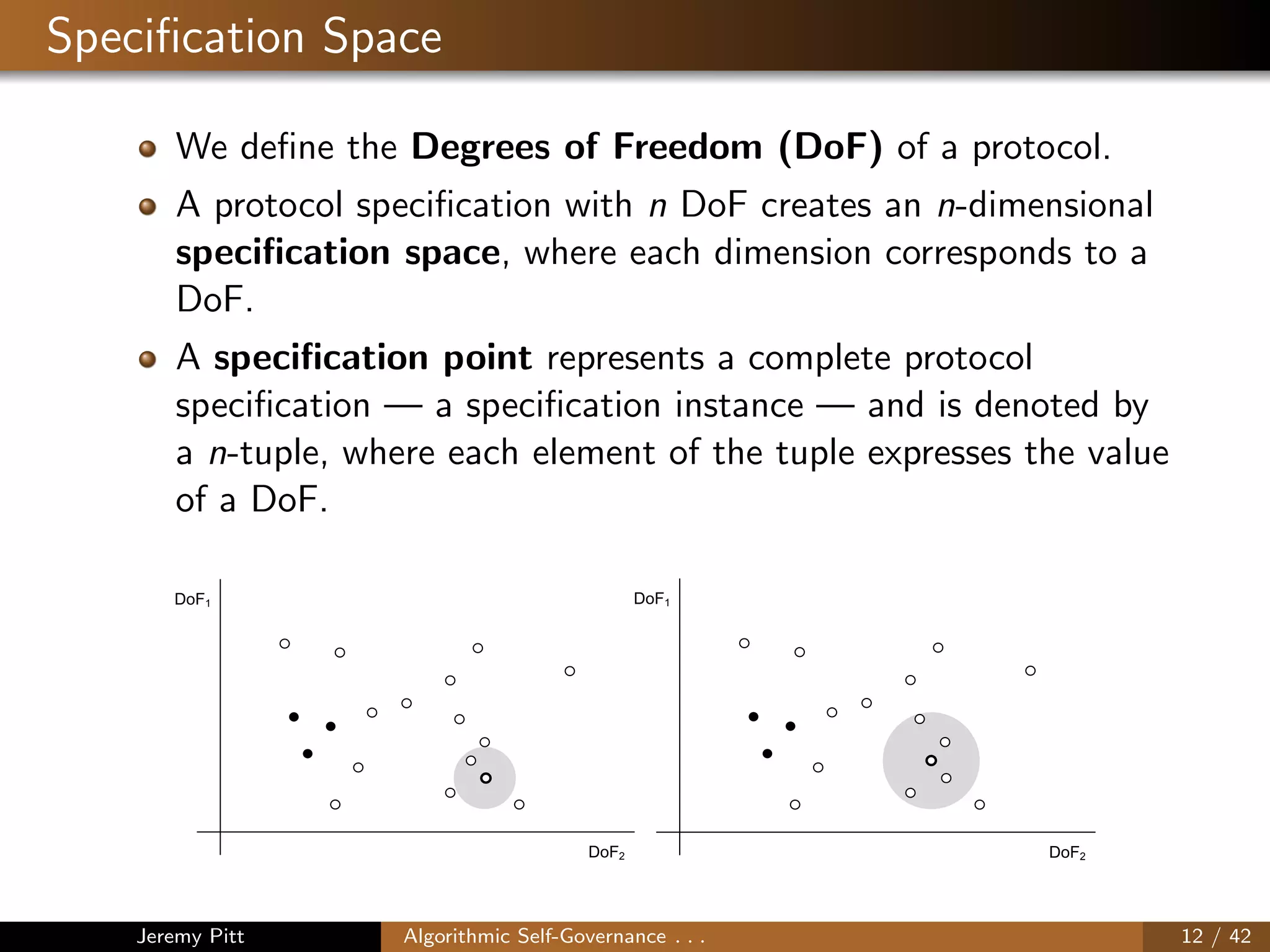
This document discusses algorithmic self-governance through the use of dynamic norm-governed multi-agent systems. It provides background on the concept of "organised adaptation" where agents can intentionally arrange or change aspects that affect themselves through agreed upon rules and procedures. A key approach discussed is using dynamic norm-governed systems, where social constraints like permissions, obligations and sanctions can be adapted at runtime. The Event Calculus is presented as a logic-based language to represent norms and protocols that can enable this type of self-governance in complex socio-technical systems.



























































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)




