Download to read offline
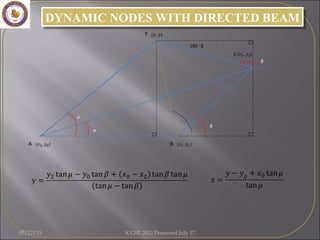
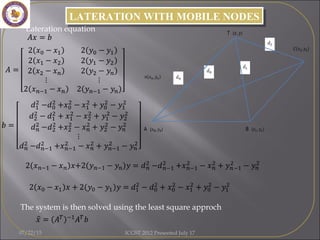
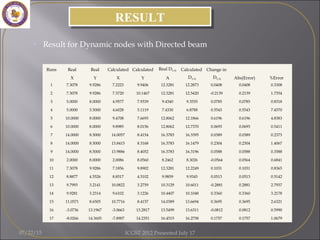
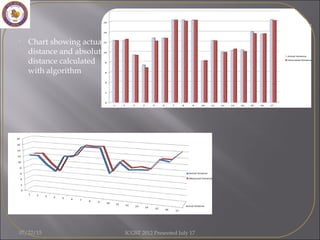
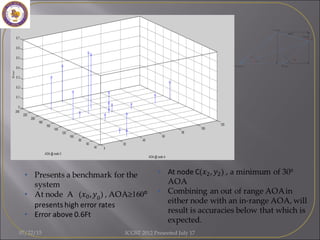
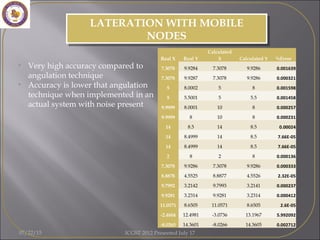
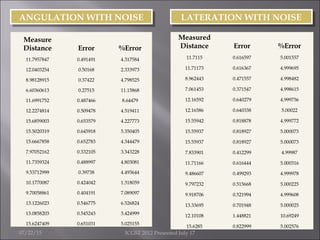


This document presents research on improving tracking accuracy for indoor situational awareness systems through dynamic movement of reference nodes. It proposes using directional antennas on mobile targets and placing reference nodes outdoors to maintain good geometry for triangulating target positions. The research aims to develop a positioning, location, and tracking algorithm based on this approach and demonstrate its performance compared to previous work. Future work plans to extend the algorithm to 3D and add node authentication. Results show the dynamic node method achieves errors as low as 0.24% without noise, increasing when noise is introduced.