Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
shigeyuki azuchi
PDF, PPTX
522 views
Open Assetsを利用したP2P型の投票システムとエクスプローラ
BitcoinのBlockchainの上位プロトコルであるOpen Assets Protocolを利用した投票システムとOpen Assets Explorerの紹介
Technology
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 15
2
/ 15
3
/ 15
4
/ 15
5
/ 15
6
/ 15
7
/ 15
8
/ 15
9
/ 15
10
/ 15
11
/ 15
12
/ 15
13
/ 15
14
/ 15
15
/ 15
More Related Content
PDF
neo4jを使ったブロックチェーンデータの解析
by
shigeyuki azuchi
PDF
JAWS FESTA 東海道 2016 ブロックチェーンとは何なのか?
by
shigeyuki azuchi
PDF
e-ZUKA Tech Night in 博多! -fin tech特集- Bitcoinのブロックチェーンでできるコントラクト
by
shigeyuki azuchi
PDF
Openassets ruby
by
shigeyuki azuchi
PDF
福岡ブロックチェーンエコノミー勉強会Vol.3「Segregated Witness」
by
shigeyuki azuchi
PDF
福岡ブロックチェーンエコノミー「ブロックチェーンのコンセンサス形成」
by
shigeyuki azuchi
PDF
福岡ブロックチェーンエコノミー勉強会In東京「カラードコインの作り方」
by
shigeyuki azuchi
PPTX
ブロックチェーンの仕組みと動向(入門編)
by
NTT DATA OSS Professional Services
neo4jを使ったブロックチェーンデータの解析
by
shigeyuki azuchi
JAWS FESTA 東海道 2016 ブロックチェーンとは何なのか?
by
shigeyuki azuchi
e-ZUKA Tech Night in 博多! -fin tech特集- Bitcoinのブロックチェーンでできるコントラクト
by
shigeyuki azuchi
Openassets ruby
by
shigeyuki azuchi
福岡ブロックチェーンエコノミー勉強会Vol.3「Segregated Witness」
by
shigeyuki azuchi
福岡ブロックチェーンエコノミー「ブロックチェーンのコンセンサス形成」
by
shigeyuki azuchi
福岡ブロックチェーンエコノミー勉強会In東京「カラードコインの作り方」
by
shigeyuki azuchi
ブロックチェーンの仕組みと動向(入門編)
by
NTT DATA OSS Professional Services
What's hot
PDF
【暗号通貨輪読会#14】confidential transaction
by
shigeyuki azuchi
PDF
5分でわかるブロックチェーンの基本的な仕組み
by
Ryo Shimamura
PDF
[2020.08.28 銀座Rails #24]Rails で Distributed Tracing をやる
by
Kaito Minatoya
PDF
Deconstruction of Serverless and blockchain
by
Takahiro Hayashida
PDF
暗号通貨輪読会 #20 bloXroute
by
Nagato Kasaki
PDF
ブロックチェーンの解説 In.live ppt
by
Asteria Corporation
PPTX
ブロックチェーンの技術と動向
by
Koichi Masukura
PPTX
ビットコイン~原理からソースまで~
by
bitbank, Inc. Tokyo, Japan
PDF
Bitcoinを技術的に理解する
by
Kenji Urushima
PPTX
図解 Blockchainの仕組み
by
Nisei Kimura
PPTX
クローリングしにくいものに挑戦 公開用
by
Lumin Hacker
PDF
Congre chain説明資料
by
Kindai University
PDF
ブロックチェーンまとめ
by
HarukiKondo
PDF
ブロックチェーン基礎(Blockchain Fundamentals)
by
Seiyo Nakazawa
PPTX
ブロックチェーン活用事例
by
株式会社 NTTテクノクロス
PPTX
分散型台帳技術Orb DLTの紹介
by
Orb, Inc.
PDF
電子情報通信学会グローバル社会とビットコイン(山崎)
by
Kindai University
PDF
ブロックチェーンの基本構造
by
Soichiro Takagi
PDF
ブロックチェーン技術の基本と応用の可能性
by
Kenji Saito
PDF
180107 intro bitcoin/altcoin
by
Masahiro Rikiso
【暗号通貨輪読会#14】confidential transaction
by
shigeyuki azuchi
5分でわかるブロックチェーンの基本的な仕組み
by
Ryo Shimamura
[2020.08.28 銀座Rails #24]Rails で Distributed Tracing をやる
by
Kaito Minatoya
Deconstruction of Serverless and blockchain
by
Takahiro Hayashida
暗号通貨輪読会 #20 bloXroute
by
Nagato Kasaki
ブロックチェーンの解説 In.live ppt
by
Asteria Corporation
ブロックチェーンの技術と動向
by
Koichi Masukura
ビットコイン~原理からソースまで~
by
bitbank, Inc. Tokyo, Japan
Bitcoinを技術的に理解する
by
Kenji Urushima
図解 Blockchainの仕組み
by
Nisei Kimura
クローリングしにくいものに挑戦 公開用
by
Lumin Hacker
Congre chain説明資料
by
Kindai University
ブロックチェーンまとめ
by
HarukiKondo
ブロックチェーン基礎(Blockchain Fundamentals)
by
Seiyo Nakazawa
ブロックチェーン活用事例
by
株式会社 NTTテクノクロス
分散型台帳技術Orb DLTの紹介
by
Orb, Inc.
電子情報通信学会グローバル社会とビットコイン(山崎)
by
Kindai University
ブロックチェーンの基本構造
by
Soichiro Takagi
ブロックチェーン技術の基本と応用の可能性
by
Kenji Saito
180107 intro bitcoin/altcoin
by
Masahiro Rikiso
Viewers also liked
PDF
Slaesforce TLS1.0 無効化にあたって
by
Hiroyuki Sawano
PPTX
【ビットコインとか勉強会#1】トランザクションを読み解く
by
Tomohide Murata
PDF
Agilizando la gestion de proyectos
by
EOI Escuela de Organización Industrial
PPTX
Digital Marketing 2009 A To Z
by
The Brand Shop
PDF
Progetto Cariplo Vogogna
by
andreacappelletto
DOCX
Tugas Riset Media (Momm & Kiddie)
by
Dhenim Prianka
PDF
VELUX brochure of decorative and sunscreening products
by
Jind?i?ka Simonsen
DOCX
El significado de la palabra tecate es desconocido
by
Neftali Oscoy Chavez
PDF
BASEMENT PLUMBING LAYOUT-SECTOR 1
by
MAHENDRAN Mahalingam
PDF
Objects At Heights Webinar
by
TENAQUIP
PDF
Grabaciones de Voz: un paso hacia la excelencia en el cc
by
contactcenter
PDF
Manual instruccions dimmer eurolight ld6230
by
rosufid
PDF
Bollettino Ufficiale Municipale di Luglio 2015
by
Città di San Benedetto del Tronto
PDF
Spain MICE
by
Jorge Rubio
PPTX
FOXFANG Cross Media Advertisement
by
Foxfang - Clever Digital Solutions
PDF
SEMANARIO 6to PODER Edición 109 Domingo 04NOV2012
by
Angel Monagas
DOC
Myplates food-guide-assignment
by
Debbie Grant
PDF
Listas completas salta
by
Dirección Nacional Electoral de Argentina
PDF
Portafolios de trabajos
by
abrilcaf
PDF
Fidiliti - Fidelización de clientes y márketing móvil
by
José Luis García Martínez
Slaesforce TLS1.0 無効化にあたって
by
Hiroyuki Sawano
【ビットコインとか勉強会#1】トランザクションを読み解く
by
Tomohide Murata
Agilizando la gestion de proyectos
by
EOI Escuela de Organización Industrial
Digital Marketing 2009 A To Z
by
The Brand Shop
Progetto Cariplo Vogogna
by
andreacappelletto
Tugas Riset Media (Momm & Kiddie)
by
Dhenim Prianka
VELUX brochure of decorative and sunscreening products
by
Jind?i?ka Simonsen
El significado de la palabra tecate es desconocido
by
Neftali Oscoy Chavez
BASEMENT PLUMBING LAYOUT-SECTOR 1
by
MAHENDRAN Mahalingam
Objects At Heights Webinar
by
TENAQUIP
Grabaciones de Voz: un paso hacia la excelencia en el cc
by
contactcenter
Manual instruccions dimmer eurolight ld6230
by
rosufid
Bollettino Ufficiale Municipale di Luglio 2015
by
Città di San Benedetto del Tronto
Spain MICE
by
Jorge Rubio
FOXFANG Cross Media Advertisement
by
Foxfang - Clever Digital Solutions
SEMANARIO 6to PODER Edición 109 Domingo 04NOV2012
by
Angel Monagas
Myplates food-guide-assignment
by
Debbie Grant
Listas completas salta
by
Dirección Nacional Electoral de Argentina
Portafolios de trabajos
by
abrilcaf
Fidiliti - Fidelización de clientes y márketing móvil
by
José Luis García Martínez
Open Assetsを利用したP2P型の投票システムとエクスプローラ
1.
Copyright ©2016 HAW
International Inc. all rights reserved. 第3回kizki PITCH Open Assetsを利用した P2P型の投票システムとエクスプローラ 2016/07/19 株式会社ハウインターナショナル 安土茂亨
2.
Copyright ©2016 HAW
International Inc. all rights reserved. 株式会社ハウインターナショナル に関する取り組み 共同研究 ‣カラードコインの電子投票などへの応用 ‣ の実装の一つである を独自開発し で公開 ‣共同研究者 近畿大学 産業理工学部 山崎重一郎 教授 ● 専門分野:暗号技術など 製品・サービス開発 ‣ ‣ブロックチェーン実証環境 ‣
3.
Copyright ©2016 HAW
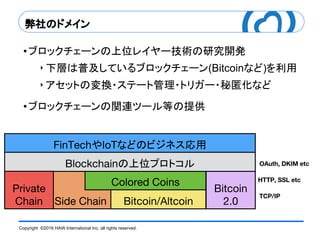
International Inc. all rights reserved. 弊社のドメイン •ブロックチェーンの上位レイヤー技術の研究開発 ‣ 下層は普及しているブロックチェーン(Bitcoinなど)を利用 ‣ アセットの変換・ステート管理・トリガー・秘匿化など •ブロックチェーンの関連ツール等の提供 や などのビジネス応用 の上位プロトコル
4.
Copyright ©2016 HAW
International Inc. all rights reserved. Open Assets Protocol
5.
Copyright ©2016 HAW
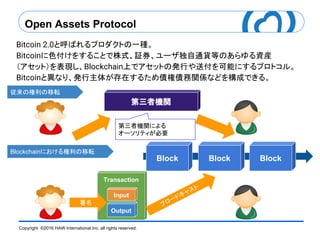
International Inc. all rights reserved. Bitcoin 2.0と呼ばれるプロダクトの一種。 Bitcoinに色付けをすることで株式、証券、ユーザ独自通貨等のあらゆる資産 (アセット)を表現し、Blockchain上でアセットの発行や送付を可能にするプロトコル。 Bitcoinと異なり、発行主体が存在するため債権債務関係などを構成できる。 第三者機関による オーソリティが必要 Open Assets Protocol 従来の権利の移転 Blockchainにおける権利の移転 Block Block Block Transaction Output Input 第三者機関 ブロードキャスト 署名
6.
Copyright ©2016 HAW
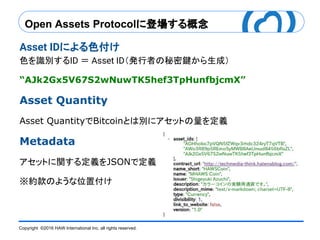
International Inc. all rights reserved. Asset IDによる色付け 色を識別するID = Asset ID(発行者の秘密鍵から生成) “AJk2Gx5V67S2wNuwTK5hef3TpHunfbjcmX” Asset Quantity Asset QuantityでBitcoinとは別にアセットの量を定義 Metadata アセットに関する定義をJSONで定義 ※約款のような位置付け Open Assets Protocolに登場する概念
7.
Copyright ©2016 HAW
International Inc. all rights reserved. BitcoinのBlockchainの上位Protocol Transaction Input Output Input Output Output 通常のBitcoinのトランザクションにMarker Outputと呼ばれる特殊な出力を 1つ加えることでOpen Assetsのトランザクションになる OP_RETURN 4f41010001904e00... Marker Output OAP Marker 4f41 Version number 0100 Asset quantity count 1 Asset quantity list [ 2000 ] Metadata length 16 Metadata u=http://goo.gl/fS4mEj Bitcoinの上位Protocolであるため Bitcoinの制約を受けるが、 BitcoinのScriptなど機能は そのまま利用可能
8.
Copyright ©2016 HAW
International Inc. all rights reserved. P2P型の投票システム
9.
Copyright ©2016 HAW
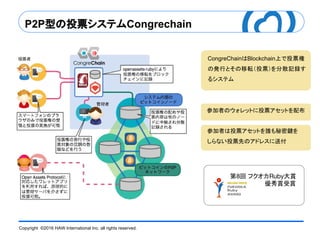
International Inc. all rights reserved. P2P型の投票システムCongrechain 参加者のウォレットに投票アセットを配布 第 回 フクオカ 大賞 優秀賞受賞 参加者は投票アセットを誰も秘密鍵を しらない投票先のアドレスに送付 CongreChainはBlockchain上で投票権 の発行とその移転(投票)を分散記録す るシステム
10.
Copyright ©2016 HAW
International Inc. all rights reserved. Blockchain分析プラットフォーム
11.
Copyright ©2016 HAW
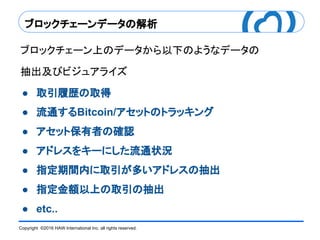
International Inc. all rights reserved. ブロックチェーンデータの解析 ブロックチェーン上のデータから以下のようなデータの 抽出及びビジュアライズ ● 取引履歴の取得 ● 流通するBitcoin/アセットのトラッキング ● アセット保有者の確認 ● アドレスをキーにした流通状況 ● 指定期間内に取引が多いアドレスの抽出 ● 指定金額以上の取引の抽出 ● etc..
12.
Copyright ©2016 HAW
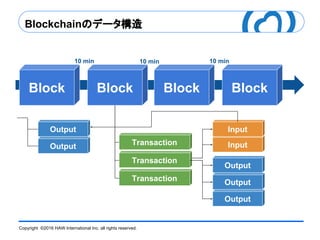
International Inc. all rights reserved. Blockchainのデータ構造 Block Transaction Input Output Block Block Block Transaction Transaction Input Output Output Output Output 10 min 10 min 10 min
13.
Copyright ©2016 HAW
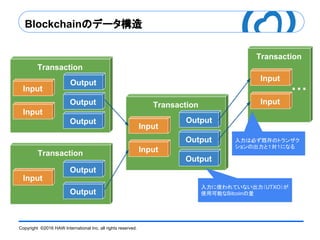
International Inc. all rights reserved. Blockchainのデータ構造 Transaction Input Output Input Output Output Transaction Input Output Output Transaction Input Output Input Output Output Transaction Input Input … 入力は必ず既存のトランザク ションの出力と1対1になる 入力に使われていない出力(UTXO)が 使用可能なBitcoinの量
14.
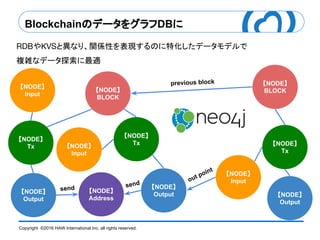
Copyright ©2016 HAW
International Inc. all rights reserved. BlockchainのデータをグラフDBに や と異なり、関係性を表現するのに特化したデータモデルで 複雑なデータ探索に最適 【NODE】 BLOCK 【NODE】 BLOCK 【NODE】 Tx 【NODE】 Tx【NODE】 Input 【NODE】 Input 【NODE】 Output 【NODE】 Output 【NODE】 Input 【NODE】 Address 【NODE】 Output 【NODE】 Tx previous block out point send send
15.
Copyright ©2016 HAW
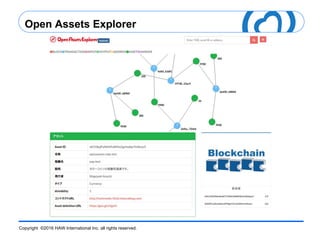
International Inc. all rights reserved. Open Assets Explorer
Download



![Copyright ©2016 HAW International Inc. all rights reserved.
BitcoinのBlockchainの上位Protocol
Transaction
Input
Output
Input
Output
Output
通常のBitcoinのトランザクションにMarker Outputと呼ばれる特殊な出力を
1つ加えることでOpen Assetsのトランザクションになる
OP_RETURN 4f41010001904e00...
Marker Output
OAP Marker 4f41
Version number 0100
Asset quantity count 1
Asset quantity list [ 2000 ]
Metadata length 16
Metadata u=http://goo.gl/fS4mEj
Bitcoinの上位Protocolであるため
Bitcoinの制約を受けるが、
BitcoinのScriptなど機能は
そのまま利用可能](https://image.slidesharecdn.com/kizkipitch1-160721075223/85/Open-Assets-P2P-7-320.jpg)













![[2020.08.28 銀座Rails #24]Rails で Distributed Tracing をやる](https://cdn.slidesharecdn.com/ss_thumbnails/ginzarails24-200828110833-thumbnail.jpg?width=640&height=640&fit=bounds)




































