Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Yoshitaka Seo
PDF, PPTX
1,309 views
.NET Gadgeteer の紹介
「.NET Gadgeteer の紹介」セッション資料 (2013年3月28日(土) MCEA パートナー交流会)
Technology
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 17
2
/ 17
3
/ 17
4
/ 17
5
/ 17
6
/ 17
7
/ 17
8
/ 17
9
/ 17
10
/ 17
11
/ 17
12
/ 17
13
/ 17
14
/ 17
15
/ 17
16
/ 17
17
/ 17
More Related Content
PDF
.NET Micro Framework の基礎
by
Yoshitaka Seo
PPTX
IoTの始め方~.NET Micro Framework編
by
Nobuaki Aoki
PPTX
02.超初心者向けセキュリティ入門(IoT)
by
Study Group by SciencePark Corp.
PPTX
mbedとwindows 8.1
by
Nobuaki Aoki
PPTX
06.超初心者向けセキュリティ入門(.netの解析と対策)
by
Study Group by SciencePark Corp.
PDF
.Net GadgeteerでIoT
by
Yoshitaka Seo
PDF
.NET Gadgeteerで組み込み開発の第一歩
by
Yoshitaka Seo
PPTX
これから始める Windows io t core
by
Masuda Tomoaki
.NET Micro Framework の基礎
by
Yoshitaka Seo
IoTの始め方~.NET Micro Framework編
by
Nobuaki Aoki
02.超初心者向けセキュリティ入門(IoT)
by
Study Group by SciencePark Corp.
mbedとwindows 8.1
by
Nobuaki Aoki
06.超初心者向けセキュリティ入門(.netの解析と対策)
by
Study Group by SciencePark Corp.
.Net GadgeteerでIoT
by
Yoshitaka Seo
.NET Gadgeteerで組み込み開発の第一歩
by
Yoshitaka Seo
これから始める Windows io t core
by
Masuda Tomoaki
What's hot
PPTX
Raspberry piと.net coreのstandardな関係
by
Masuda Tomoaki
PDF
【de:code 2020】 ゼロトラスト Deep Dive 間違いだらけのリモートワーク セキュリティ
by
日本マイクロソフト株式会社
PPTX
Windows io t core on raspberry pi meets ロボットアーム
by
Masuda Tomoaki
PPTX
これからはじめるIoTデバイス mbed入門編
by
Naoto Tanaka
PPTX
Easy-to-use IoT system created with Azure and EnOcean
by
Atomu Hidaka
PPTX
Windows IoT Core and Robot Arm
by
Masuda Tomoaki
PPTX
Tips and tricks for Azure IoT system development
by
Atomu Hidaka
PDF
20171105 go con2017_lt
by
Keigo Suda
PPTX
Windows10 IoT CoreとBLE
by
Kenta IDA
PDF
Designer's Design Talk「デザインの基礎」
by
典子 松本
PPTX
Microsoft Azure IoT central main menu
by
Atomu Hidaka
PPTX
ラズパイ2にWindows 10 IoT Coreを入れてWindows Universal アプリ動かしてみた
by
Kenichi Yoshida
PDF
mbedでIoTデバイス
by
Junichi Katsu
PPTX
2015 0227 OSC-Spring Tokyo NETMF
by
Atomu Hidaka
PDF
L2延伸を利用したクラウド移行とクラウド活用術
by
富士通クラウドテクノロジーズ株式会社
PPTX
Azure IoT Plug and Play, the overview and practice
by
Atomu Hidaka
PPTX
非エンジニアでも安心!ノンコーディングでもココまでできる!LINE × Azure Logic Apps
by
典子 松本
PPTX
Wio LTEをJavaScriptで開発
by
Junichi Katsu
PPTX
試してGOTTEN READY! Azure Sphere
by
Knowledge & Experience
PDF
Wio LTEと連携できるGroveを普段の実体験から
by
Seigo Tanaka
Raspberry piと.net coreのstandardな関係
by
Masuda Tomoaki
【de:code 2020】 ゼロトラスト Deep Dive 間違いだらけのリモートワーク セキュリティ
by
日本マイクロソフト株式会社
Windows io t core on raspberry pi meets ロボットアーム
by
Masuda Tomoaki
これからはじめるIoTデバイス mbed入門編
by
Naoto Tanaka
Easy-to-use IoT system created with Azure and EnOcean
by
Atomu Hidaka
Windows IoT Core and Robot Arm
by
Masuda Tomoaki
Tips and tricks for Azure IoT system development
by
Atomu Hidaka
20171105 go con2017_lt
by
Keigo Suda
Windows10 IoT CoreとBLE
by
Kenta IDA
Designer's Design Talk「デザインの基礎」
by
典子 松本
Microsoft Azure IoT central main menu
by
Atomu Hidaka
ラズパイ2にWindows 10 IoT Coreを入れてWindows Universal アプリ動かしてみた
by
Kenichi Yoshida
mbedでIoTデバイス
by
Junichi Katsu
2015 0227 OSC-Spring Tokyo NETMF
by
Atomu Hidaka
L2延伸を利用したクラウド移行とクラウド活用術
by
富士通クラウドテクノロジーズ株式会社
Azure IoT Plug and Play, the overview and practice
by
Atomu Hidaka
非エンジニアでも安心!ノンコーディングでもココまでできる!LINE × Azure Logic Apps
by
典子 松本
Wio LTEをJavaScriptで開発
by
Junichi Katsu
試してGOTTEN READY! Azure Sphere
by
Knowledge & Experience
Wio LTEと連携できるGroveを普段の実体験から
by
Seigo Tanaka
Similar to .NET Gadgeteer の紹介
PDF
.NET Micro Framework で IoT
by
Yoshitaka Seo
PPTX
.NET Micro Framework / .NET Gadgeteer
by
Knowledge & Experience
PPTX
マイクロソフトMVPの紹介 .NETラボ勉強会 2010/11/27
by
Tomokazu Kizawa
PDF
2014 0228 OSC-Spring Tokyo NETMF
by
Atomu Hidaka
PDF
LightSwitchで遊んでみた
by
Yoshitaka Seo
PDF
LightSwitchでWebアプリ開発
by
Yoshitaka Seo
PDF
Application Architecture for Enterprise Win Store Apps with DDD Pattern
by
Atsushi Kambara
PDF
LightSwitch で遊んでみた Rev. 2
by
Yoshitaka Seo
PDF
.NET Gadgeteer のハンズオン資料 (2014年3月版)
by
Yoshitaka Seo
PDF
Net advantage 2012 volume2 最新情報 xaml プラットフォーム編
by
Daizen Ikehara
PPTX
2015 1025 OSC-Fall Tokyo NETMF
by
Atomu Hidaka
PDF
Visual Studio Community 2013 で始めるプログラミング Win32/MFC #clrh93
by
hiyohiyo
PDF
Developr Camp 2012 Japan Fall Day2 Special Session - Visual Studio 2012 で始める ...
by
Developer Camp 2012 Japan Fall
PDF
Dev camp2012jpn day2special
by
Katsuhito Katoh
PDF
LightSwitch ~結局何ができるの~ rev 2
by
Yoshitaka Seo
PPTX
スクリーンのその先へ Beyond the Screen : There and Back again
by
Ken Azuma
PDF
OSC 2012 Microsoft Session [マイクロソフトの魅せるセンサー×クラウド技術]
by
Aya Tokura
PPT
20010127
by
小野 修司
.NET Micro Framework で IoT
by
Yoshitaka Seo
.NET Micro Framework / .NET Gadgeteer
by
Knowledge & Experience
マイクロソフトMVPの紹介 .NETラボ勉強会 2010/11/27
by
Tomokazu Kizawa
2014 0228 OSC-Spring Tokyo NETMF
by
Atomu Hidaka
LightSwitchで遊んでみた
by
Yoshitaka Seo
LightSwitchでWebアプリ開発
by
Yoshitaka Seo
Application Architecture for Enterprise Win Store Apps with DDD Pattern
by
Atsushi Kambara
LightSwitch で遊んでみた Rev. 2
by
Yoshitaka Seo
.NET Gadgeteer のハンズオン資料 (2014年3月版)
by
Yoshitaka Seo
Net advantage 2012 volume2 最新情報 xaml プラットフォーム編
by
Daizen Ikehara
2015 1025 OSC-Fall Tokyo NETMF
by
Atomu Hidaka
Visual Studio Community 2013 で始めるプログラミング Win32/MFC #clrh93
by
hiyohiyo
Developr Camp 2012 Japan Fall Day2 Special Session - Visual Studio 2012 で始める ...
by
Developer Camp 2012 Japan Fall
Dev camp2012jpn day2special
by
Katsuhito Katoh
LightSwitch ~結局何ができるの~ rev 2
by
Yoshitaka Seo
スクリーンのその先へ Beyond the Screen : There and Back again
by
Ken Azuma
OSC 2012 Microsoft Session [マイクロソフトの魅せるセンサー×クラウド技術]
by
Aya Tokura
20010127
by
小野 修司
More from Yoshitaka Seo
PDF
言語系サービスの統合ポータル Language Studio で Microsoft AI を再確認
by
Yoshitaka Seo
PDF
Arduino で組み込み開発 - 京都TECH オープンキャンパス2021
by
Yoshitaka Seo
PDF
AI-900 ポイント解説
by
Yoshitaka Seo
PDF
AI プログラミング - OCA / 京都TECH オープンキャンパス 2021
by
Yoshitaka Seo
PDF
AIの見方、AIとの付き合い方
by
Yoshitaka Seo
PDF
Custom Visionで仏像を画像分類
by
Yoshitaka Seo
PDF
誰もが AI を使う時代、作る時代
by
Yoshitaka Seo
PDF
Azure IoT Edge で Custom Vision
by
Yoshitaka Seo
PDF
API ペタペタしただけのお手軽 感情分析アプリ
by
Yoshitaka Seo
PDF
Machine Learning studio で構造化データから予測分析 (LT版)
by
Yoshitaka Seo
PDF
BIerのためのAI入門
by
Yoshitaka Seo
PDF
構造化データをツールで簡単に分析
by
Yoshitaka Seo
PDF
チャットボットの自然言語処理
by
Yoshitaka Seo
PDF
Custom Visionを活用するためのTips
by
Yoshitaka Seo
PDF
Machine Learning Serviceを使ってみよう
by
Yoshitaka Seo
PDF
Bot Framework Emulator はこんなにすごい
by
Yoshitaka Seo
PDF
VS Code Tools for AI の紹介
by
Yoshitaka Seo
PDF
Bot Builder V4 SDK + QnA Maker / LUIS
by
Yoshitaka Seo
PDF
QnA Maker 逆入門
by
Yoshitaka Seo
PDF
PowerApps アプリ開発入門
by
Yoshitaka Seo
言語系サービスの統合ポータル Language Studio で Microsoft AI を再確認
by
Yoshitaka Seo
Arduino で組み込み開発 - 京都TECH オープンキャンパス2021
by
Yoshitaka Seo
AI-900 ポイント解説
by
Yoshitaka Seo
AI プログラミング - OCA / 京都TECH オープンキャンパス 2021
by
Yoshitaka Seo
AIの見方、AIとの付き合い方
by
Yoshitaka Seo
Custom Visionで仏像を画像分類
by
Yoshitaka Seo
誰もが AI を使う時代、作る時代
by
Yoshitaka Seo
Azure IoT Edge で Custom Vision
by
Yoshitaka Seo
API ペタペタしただけのお手軽 感情分析アプリ
by
Yoshitaka Seo
Machine Learning studio で構造化データから予測分析 (LT版)
by
Yoshitaka Seo
BIerのためのAI入門
by
Yoshitaka Seo
構造化データをツールで簡単に分析
by
Yoshitaka Seo
チャットボットの自然言語処理
by
Yoshitaka Seo
Custom Visionを活用するためのTips
by
Yoshitaka Seo
Machine Learning Serviceを使ってみよう
by
Yoshitaka Seo
Bot Framework Emulator はこんなにすごい
by
Yoshitaka Seo
VS Code Tools for AI の紹介
by
Yoshitaka Seo
Bot Builder V4 SDK + QnA Maker / LUIS
by
Yoshitaka Seo
QnA Maker 逆入門
by
Yoshitaka Seo
PowerApps アプリ開発入門
by
Yoshitaka Seo
.NET Gadgeteer の紹介
1.
.NET Gadgeteer の紹介 瀬尾佳隆
(@seosoft) Microsoft MVP for Visual C# MCEA パートナー交流会 2013年3月
2.
自己紹介 瀬尾 佳隆 (せお
よしたか) MVP for Visual C# (Jan 2009 – Dec 2013) 最近の興味の対象 .NET Gadgeteer / .NET Micro Framework Visual Studio LightSwitch SharePoint / Office 365 メール・・・y.seo@seosoft.jp ブログ・・・http://yseosoft.wordpress.com/ 劇団四季と AKB48 グループとディズニーが好き
3.
宣伝 4月20日(土) に勉強会をやります 皆で
.NET Micro Framework に「触れる」勉強会 本当に “物理的に触れる” 会です 勉強会とは名ばかりのワイガヤの集まりです ぜひ遊びに来てください! 詳細は、このあとで瀬尾に声をかけてください MCEA の交流会と日程が重なっているようですが・・・
4.
.NET Micro Framework
とは?
5.
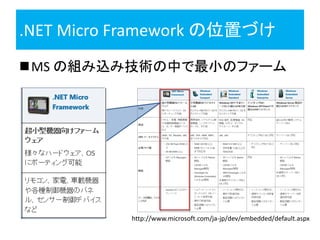
.NET Micro Framework
の位置づけ MS の組み込み技術の中で最小のファーム http://www.microsoft.com/ja-jp/dev/embedded/default.aspx
6.
.NET Micro Framework
のメリット Visual Studio が使える インテリセンス デバッグ機能 C# / VB が使える 使い慣れた System 名前空間 Network, FileSystem などのサポートが充実
7.
.NET Gadgeteer
8.
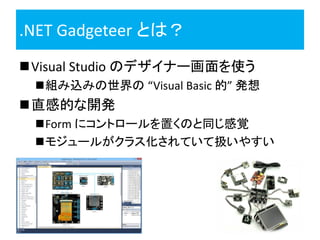
.NET Gadgeteer とは? Visual
Studio のデザイナー画面を使う 組み込みの世界の “Visual Basic 的” 発想 直感的な開発 Form にコントロールを置くのと同じ感覚 モジュールがクラス化されていて扱いやすい
9.
多数のモジュール群
10.
.NET Gadgeteer が適する場面 プロトタイピング時 開発効率が要求される時 組み込みのノウハウがチームに少ない時 1個~数個程度のデバイスのみ必要な時
コスト的に大量生産には向かない
11.
デモ デザイナーを見てみます コードを見てみます 動きを見てみます
12.
まとめ
13.
NETMF / Gadgeteer
のすすめ あらゆるものがクラウドに繋がる時代 スマホより “シンプルな” デバイスも必要 .NET Micro Framework なら組み込みも簡単 Gadgeteer ならもっと簡単 “娯楽” としても、かなり楽しい技術
14.
参考
15.
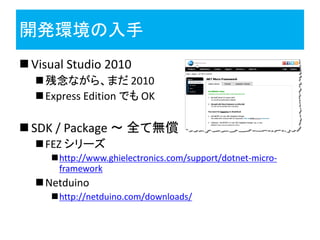
開発環境の入手 Visual Studio
2010 残念ながら、まだ 2010 Express Edition でも OK SDK / Package ~ 全て無償 FEZ シリーズ http://www.ghielectronics.com/support/dotnet-micro- framework Netduino http://netduino.com/downloads/
16.
デバイスの購入 FEZ シリーズ (.NET
Gadgeteer) http://tinyclr.jp/ http://tinyclr.com/ Netduino http://netduino.com/
17.
情報源 GHI Electronics
Support Page GHI 提供のライブラリの API リファレンス Gadgeteer モジュールの API リファレンス API Reference for .NET Micro Framework デバイスとITの架け橋 (MS 太田さんブログ) おまけ :-P http://yseosoft.wordpress.com/pages/netmf/
Download





















































![OSC 2012 Microsoft Session [マイクロソフトの魅せるセンサー×クラウド技術]](https://cdn.slidesharecdn.com/ss_thumbnails/osc2012tokyofinal20120907-120912014020-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)