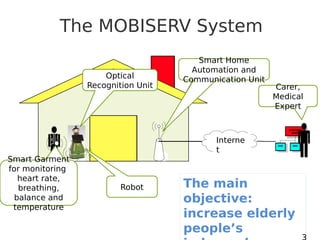
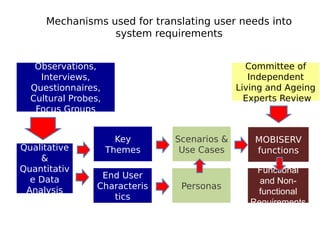
The MOBISERV project developed an integrated intelligent home system to provide health, nutrition, and mobility services for older adults. The system included a robot, smart home automation, sensors in a smart garment, and communication with medical experts and caregivers. Extensive user research was conducted to develop the system requirements. The final prototype was tested with older adults, caregivers, and medical professionals. While acceptance of the technologies was good, the testing revealed issues with voice recognition, complex situation interpretation, and safety that require further work.