Downloaded 125 times

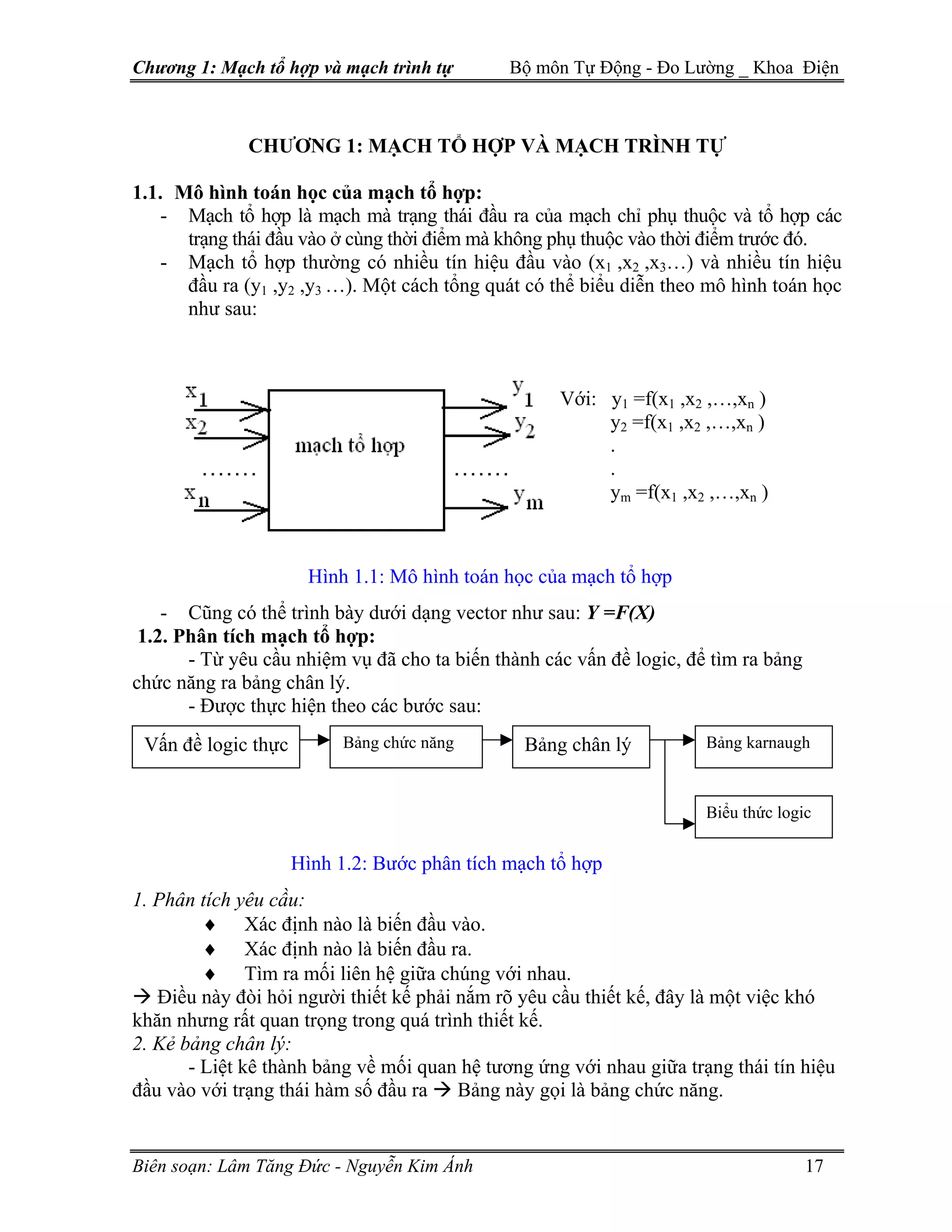
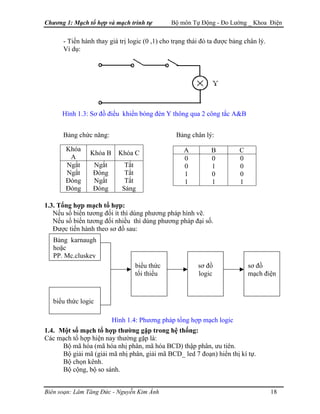
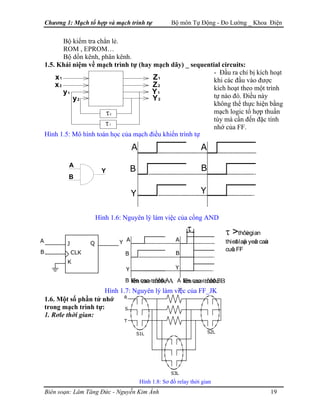
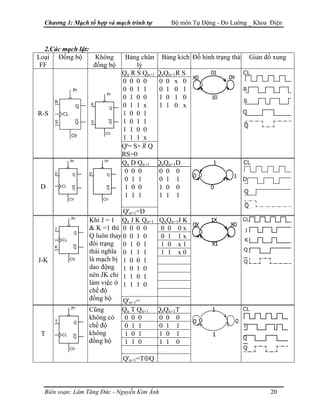





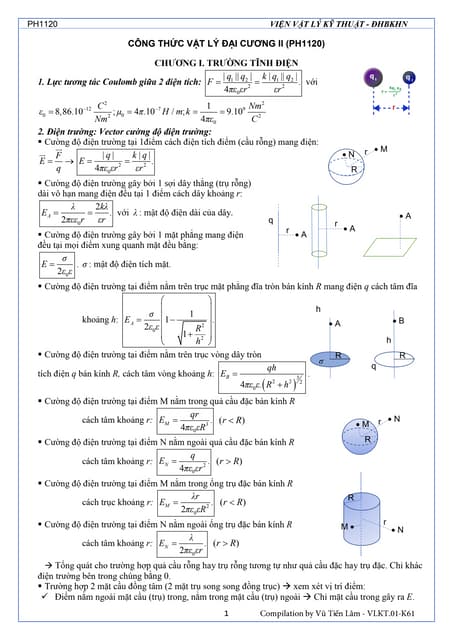
Chương 1 giới thiệu về mạch tổ hợp và mạch trình tự, phân tích mô hình toán học của mạch tổ hợp, bao gồm các bước phân tích yêu cầu và xây dựng bảng chân lý. Chương cũng đề cập đến khái niệm mạch trình tự và các phương pháp mô tả mạch như bảng chuyển trạng thái, đồ hình Mealy, đồ hình Moore, và grafcet trong hệ thống tự động hóa. Ngoài ra, một số loại mạch tổ hợp thường gặp cũng được nêu ra.




![[Cntt] bài giảng kĩ thuật vi xử lí](https://cdn.slidesharecdn.com/ss_thumbnails/cnttbigingkthutvixl-160829131326-thumbnail.jpg?width=640&height=640&fit=bounds)