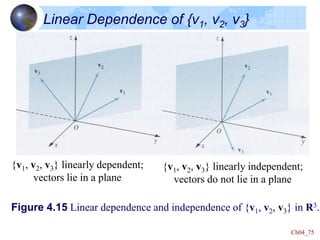
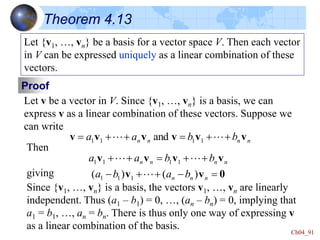
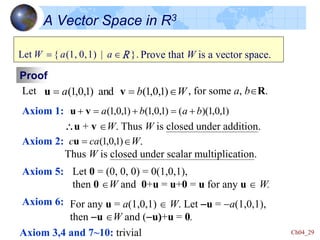
This document defines key concepts in linear algebra including vector spaces, vectors, and operations on vectors such as addition and scalar multiplication. It specifically focuses on the vector space Rn:
- Rn is the set of all n-tuples of real numbers, which forms a vector space under component-wise addition and scalar multiplication.
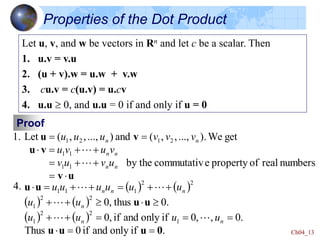
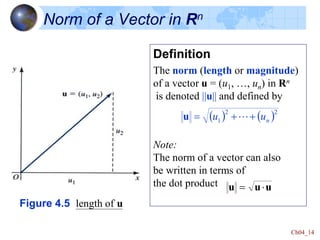
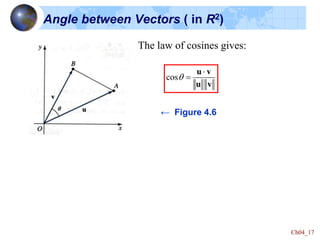
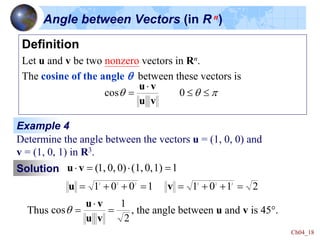
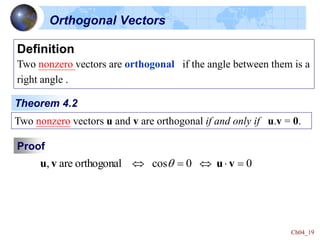
- The dot product and norm are defined for vectors in Rn and used to determine properties like orthogonality and the angle between vectors.
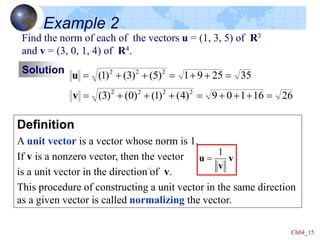
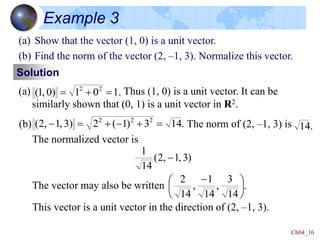
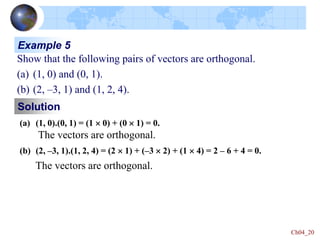
- Examples show how to perform vector operations in Rn like addition, scalar multiplication, finding the dot product and norm, and determining if vectors are orthogonal.
![Ch04_33
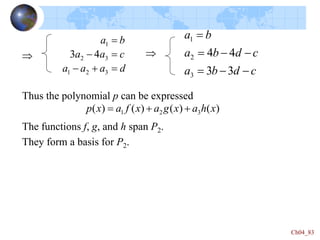
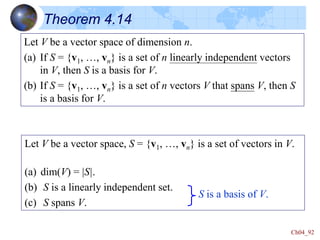
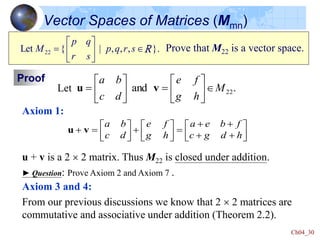
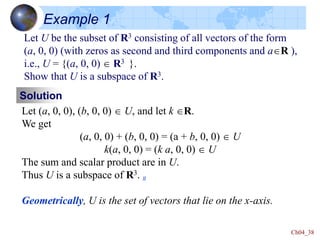
Vector Spaces of Functions (continued)
Axiom 5:
Let 0 be the function such that 0(x) = 0 for every xR.
0 is called the zero function.
We get (f + 0)(x) = f(x) + 0(x) = f(x) + 0 = f(x) for every xR.
Thus f + 0 = f. (0 is the zero vector.)
Axiom 6:
Let the function –f defined by (-f )(x) = -f (x).
Thus [f + (-f )] = 0, -f is the negative of f.
)
(
0
)]
(
[
)
(
)
)(
(
)
(
)
)](
(
[
x
x
f
x
f
x
f
x
f
x
f
f
0
-
-
-
Is the set F ={ f | f(x)=ax2+bx+c for some a,b,c R} a vector space?](https://image.slidesharecdn.com/mat223ch4-vectorspaces-240123071324-46fc57a3/85/Mat-223_Ch4-VectorSpaces-ppt-33-320.jpg)
![Ch04_41
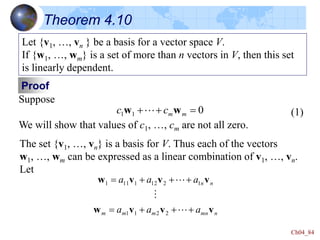
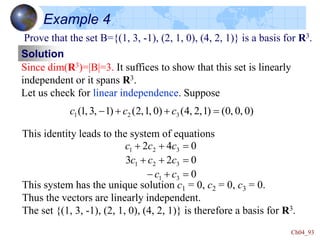
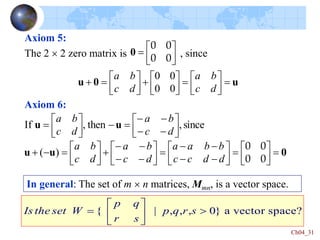
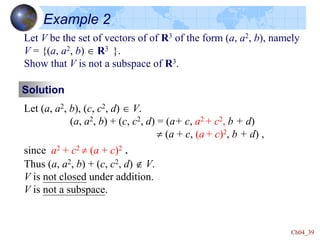
The vector space of polynomials (Pn)
Example 5. Let Pn denoted the set of real polynomial functions of
degree n. Prove that Pn is a vector space if addition and scalar
multiplication are defined on polynomials in a pointwise manner.
Solution
Let f and g Pn, where
1
1 1 0
1
1 1 0
( ) ... and
( ) ...
n n
n n
n n
n n
f x a x a x a x a
g x b x b x b x b
-
-
-
-
►(+)
(f + g)(x) is a polynomial of degree n.
Thus f + g Pn.
Then Pn is closed under addition.
)
(
)
(
...
)
(
)
(
]
...
[
]
...
[
)
(
)
(
)
)(
(
0
0
1
1
1
1
1
0
1
1
1
0
1
1
1
b
a
x
b
a
x
b
a
x
b
a
b
x
b
x
b
x
b
a
x
a
x
a
x
a
x
g
x
f
x
g
f
n
n
n
n
n
n
n
n
n
n
n
n
n
n
-
-
-
-
-
-
-
Example 4.](https://image.slidesharecdn.com/mat223ch4-vectorspaces-240123071324-46fc57a3/85/Mat-223_Ch4-VectorSpaces-ppt-41-320.jpg)
![Ch04_42
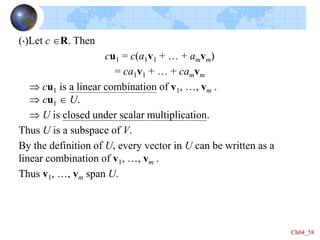
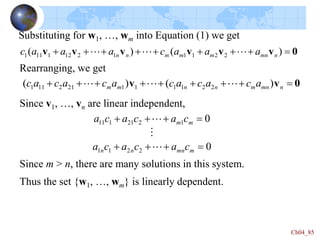
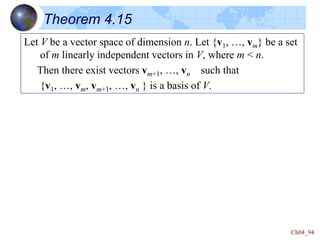
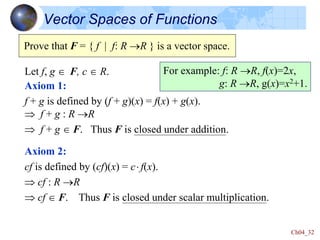
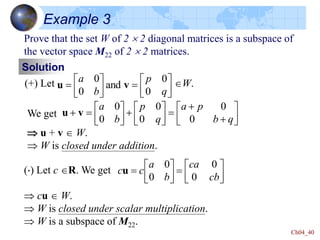
►() Let c R,
(cf )(x) is a polynomial of degree n.
So cf Pn.
Then Pn is closed under scalar multiplication.
In conclusion : By (+) and (), Pn is a subspace of the vector
space F of functions.
Therefore Pn is itself a vector space.
0
1
1
1
0
1
1
1
...
]
...
[
)]
(
[
)
)(
(
ca
x
ca
x
ca
x
ca
a
x
a
x
a
x
a
c
x
f
c
x
cf
n
n
n
n
n
n
n
n
-
-
-
-](https://image.slidesharecdn.com/mat223ch4-vectorspaces-240123071324-46fc57a3/85/Mat-223_Ch4-VectorSpaces-ppt-42-320.jpg)