Download to read offline



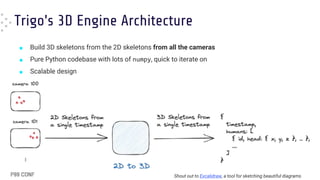
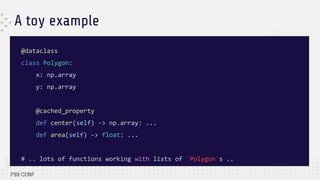
![■ So, let's have a look at find_close_polygons
Measure first
def find_close_polygons(
polygon_subset: List[Polygon], point: np.array, max_dist: float
) -> List[Polygon]:
close_polygons = []
for poly in polygon_subset:
if np.linalg.norm(poly.center - point) < max_dist:
close_polygons.append(poly)
return close_polygons](https://image.slidesharecdn.com/ohadravidp99conf2023-240627223444-fe3b218e/85/Making-Python-100x-Faster-with-Less-Than-100-Lines-of-Rust-19-320.jpg)
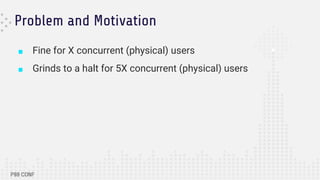
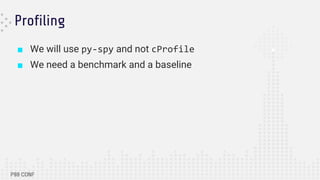
![■ Starting out, our crate is going to look like this:
Our Rust Crate
use pyo3::prelude::*;
#[pyfunction]
fn find_close_polygons() -> PyResult<()> {
Ok(())
}
#[pymodule]
fn poly_match_rs(_py: Python, m: &PyModule) -> PyResult<()> {
m.add_function(wrap_pyfunction!(find_close_polygons, m)?)?;
Ok(())
}](https://image.slidesharecdn.com/ohadravidp99conf2023-240627223444-fe3b218e/85/Making-Python-100x-Faster-with-Less-Than-100-Lines-of-Rust-21-320.jpg)
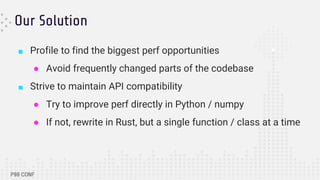
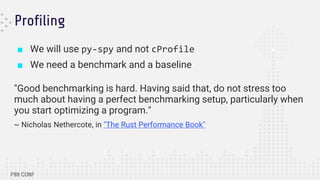
![■ Our struct is going to look like this:
v2 - Rewrite Polygon in Rust
use ndarray::Array1;
#[pyclass(subclass)]
struct Polygon {
x: Array1<f64>,
y: Array1<f64>,
center: Array1<f64>,
}](https://image.slidesharecdn.com/ohadravidp99conf2023-240627223444-fe3b218e/85/Making-Python-100x-Faster-with-Less-Than-100-Lines-of-Rust-26-320.jpg)
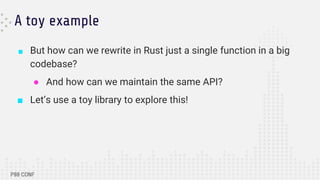
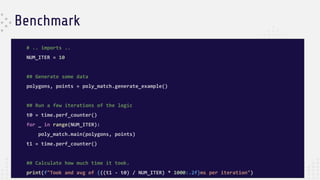
![■ Our struct is going to look like this, which is pretty similar to the original class!
v2 - Rewrite Polygon in Rust
use ndarray::Array1;
#[pyclass(subclass)]
struct Polygon {
x: Array1<f64>,
y: Array1<f64>,
center: Array1<f64>,
}
import numpy as np
@dataclass
class Polygon:
x: np.array
y: np.array
@cached_property
def center(self) -> np.array: ...](https://image.slidesharecdn.com/ohadravidp99conf2023-240627223444-fe3b218e/85/Making-Python-100x-Faster-with-Less-Than-100-Lines-of-Rust-27-320.jpg)
![■ And can be subclassed from Python
v2 - Rewrite Polygon in Rust
use ndarray::Array1;
#[pyclass(subclass)]
struct Polygon {
x: Array1<f64>,
y: Array1<f64>,
center: Array1<f64>,
}
class Polygon(poly_match_rs.Polygon):
_area: float = None
def area(self) -> float:
...](https://image.slidesharecdn.com/ohadravidp99conf2023-240627223444-fe3b218e/85/Making-Python-100x-Faster-with-Less-Than-100-Lines-of-Rust-28-320.jpg)
![■ And use the fact that we have a Rust-based struct to implement our function
v2 - Rewrite Polygon in Rust
for poly in polygons {
let norm = {
let center = &poly.as_ref(py).borrow().center;
((center[0] - point[0]).square() + (center[1] - point[1]).square()).sqrt()
};
if norm < max_dist {
close_polygons.push(poly)
}
}](https://image.slidesharecdn.com/ohadravidp99conf2023-240627223444-fe3b218e/85/Making-Python-100x-Faster-with-Less-Than-100-Lines-of-Rust-30-320.jpg)
![■ And use the fact that we have a Rust-based struct to implement our function:
v2 - Rewrite Polygon in Rust
for poly in polygons {
let norm = {
let center = &poly.as_ref(py).borrow().center;
((center[0] - point[0]).square() + (center[1] - point[1]).square()).sqrt()
};
if norm < max_dist {
close_polygons.push(poly)
}
}](https://image.slidesharecdn.com/ohadravidp99conf2023-240627223444-fe3b218e/85/Making-Python-100x-Faster-with-Less-Than-100-Lines-of-Rust-31-320.jpg)



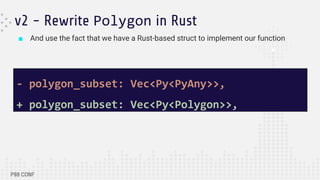
The document details a presentation by Ohad Ravid on improving Python library performance using Rust, showcasing a practical approach to incrementally optimize code without complete rewrites. Ravid highlights the project's challenges, including concurrent user limitations and the process of profiling and rewriting specific functions to enhance performance significantly. The integration of Rust through the PyO3 library allowed for substantial speed improvements, demonstrating how combining Python and Rust can yield efficient systems.




















































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)












