Bayes theorem
• Bayes'Theorem, named after 18th-century British
mathematician Thomas Bayes, is a mathematical formula
for determining conditional probability.
• Conditional probability is the likelihood of an outcome
occurring, based on a previous outcome having occurred
in similar circumstances.
• Bayes' theorem provides a way to revise existing
predictions or theories (update probabilities) given new or
additional evidence.
2
3.
Conditional probability
• considerthe probability of winning a race, given the condition you didn't
sleep the night before.
• Bayes' Rule tells you how to calculate a conditional probability with
information you already have.
3
4.
Bayes Classifier
• Bayesianclassifiers are statistical classifiers.
• They can predict class membership probabilities, such as the
probability that a given sample belongs to a particular class.
• Bayesian classifier is based on Bayes’ theorem.
• two important events
• A hypothesis (which can be true or false)
• An evidence (which can be present or absent).
4
5.
• Let Hbe some hypothesis, such as that the data X belongs to a
specific class C.
• For classification problems, our goal is to determine P (H|X), the
probability that the hypothesis H holds given the ”evidence”, (i.e. the
observed data sample X).
• we are looking for the probability that sample X belongs to class C,
given that we know the attribute description of X.
• P(H|X) is the a posteriori probability of H conditioned on X.
5
Bayes classifier
6.
Bayesian classification
• ourgoal is to determine P (H|X), the probability that the hypothesis H
holds given the ”evidence”, (i.e. the observed data sample X).
• we are looking for the probability that sample X belongs to class C,
given that we know the attribute description of X.
6
7.
Bayes’ theorem
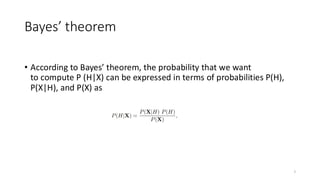
• Accordingto Bayes’ theorem, the probability that we want
to compute P (H|X) can be expressed in terms of probabilities P(H),
P(X|H), and P(X) as
7
8.
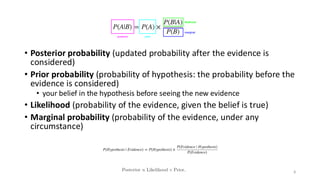
• Posterior probability(updated probability after the evidence is
considered)
• Prior probability (probability of hypothesis: the probability before the
evidence is considered)
• your belief in the hypothesis before seeing the new evidence
• Likelihood (probability of the evidence, given the belief is true)
• Marginal probability (probability of the evidence, under any
circumstance)
8
9.
Example
• P(H) isthe a priori probability of H.
• this is the probability that any given customer will buy a computer, regardless of age,
income, or any other information.
• The a posteriori probability P (H|X) is based on more information (about the customer)
than the a priori probability, P (H), which is independent of X.
• P(X|H) is the probability of X conditioned on H.
• It is the probability that a customer X, is 35 years old and earns $40,000, given that we
know the customer will buy a computer
• P(H|X) is the probability that customer X will buy a computer given that we know the
customer’s age and income.
• P(X) is the marginal probability of X.
• it is the probability that a person from our set of customers is 35 years old and earns $40,000.
9
• suppose our data samples have attributes: age and income, and
that sample X is a 35-year-old customer with an income of $40,000.
• Suppose that H is the hypothesis that our customer will buy
a computer.
10.
Example
• Your Neighbouris watching their favorite football (or soccer) team. You hear them
cheering, and want to estimate the probability their team has scored.
• the posterior probability:
o P(goal|cheering)
• prior probability:
o P(goal)
• likelihood probability:
o P(cheering|goal)
• marginal probability:
o P(cheering)
10
11.
Naive Bayesian Classifier
•Naive Bayesian classifiers assume that the effect of an attribute
value on a given class is independent of the values of the other
attributes.
• This assumption is called class conditional independence.
• It is made to simplify the computation involved and, in this sense,
is considered ”naive”.
11
12.
Naive Bayesian Classifier
1.Let T be a training set of samples, each with their class labels.
• There are m classes, C1, C2, . . . , Cm.
• Each sample is represented by an n-dimensional vector, X = {x1, x2, . . . , xn},
depicting n measured values of the n attributes, A1, A2, . . . , An, respectively.
2. Given a sample X, the classifier will predict that X belongs to the class
having the highest a posteriori probability, conditioned on X.
• That is X is predicted to belong to the class Ci if and only if
12
13.
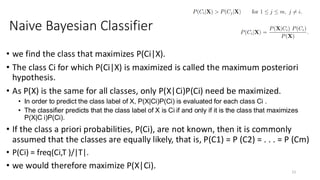
• we findthe class that maximizes P(Ci|X).
• The class Ci for which P(Ci|X) is maximized is called the maximum posteriori
hypothesis.
• As P(X) is the same for all classes, only P(X|Ci)P(Ci) need be maximized.
• In order to predict the class label of X, P(X|Ci)P(Ci) is evaluated for each class Ci .
• The classifier predicts that the class label of X is Ci if and only if it is the class that maximizes
P(X|C i)P(Ci).
• If the class a priori probabilities, P(Ci), are not known, then it is commonly
assumed that the classes are equally likely, that is, P(C1) = P (C2) = . . . = P (Cm)
• P(Ci) = freq(Ci,T )/|T|.
• we would therefore maximize P(X|Ci).
13
Naive Bayesian Classifier
14.
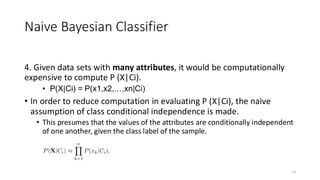
4. Given datasets with many attributes, it would be computationally
expensive to compute P (X|Ci).
• P(X|Ci) = P(x1,x2,…,xn|Ci)
• In order to reduce computation in evaluating P (X|Ci), the naive
assumption of class conditional independence is made.
• This presumes that the values of the attributes are conditionally independent
of one another, given the class label of the sample.
14
Naive Bayesian Classifier
15.
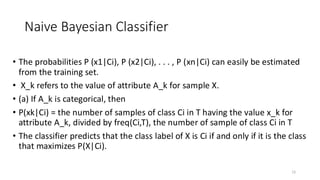
• The probabilitiesP (x1|Ci), P (x2|Ci), . . . , P (xn|Ci) can easily be estimated
from the training set.
• X_k refers to the value of attribute A_k for sample X.
• (a) If A_k is categorical, then
• P(xk|Ci) = the number of samples of class Ci in T having the value x_k for
attribute A_k, divided by freq(Ci,T), the number of sample of class Ci in T
• The classifier predicts that the class label of X is Ci if and only if it is the class
that maximizes P(X|Ci).
15
Naive Bayesian Classifier
16.
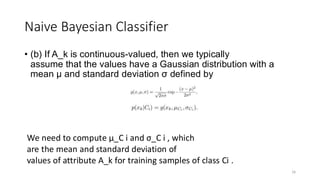
• (b) IfA_k is continuous-valued, then we typically
assume that the values have a Gaussian distribution with a
mean µ and standard deviation σ defined by
16
Naive Bayesian Classifier
We need to compute µ_C i and σ_C i , which
are the mean and standard deviation of
values of attribute A_k for training samples of class Ci .
17.
Bayes decision theory
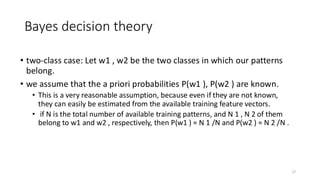
•two-class case: Let w1 , w2 be the two classes in which our patterns
belong.
• we assume that the a priori probabilities P(w1 ), P(w2 ) are known.
• This is a very reasonable assumption, because even if they are not known,
they can easily be estimated from the available training feature vectors.
• if N is the total number of available training patterns, and N 1 , N 2 of them
belong to w1 and w2 , respectively, then P(w1 ) ≈ N 1 /N and P(w2 ) ≈ N 2 /N .
17
18.
Bayes decision theory
18
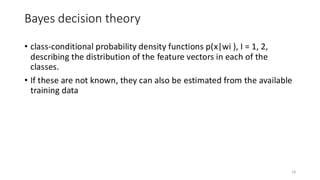
•class-conditional probability density functions p(x|wi ), I = 1, 2,
describing the distribution of the feature vectors in each of the
classes.
• If these are not known, they can also be estimated from the available
training data
19.
Bayes decision theory
19
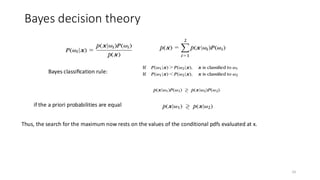
Bayesclassification rule:
if the a priori probabilities are equal
Thus, the search for the maximum now rests on the values of the conditional pdfs evaluated at x.
20.
Bayes decision theory
•an example of two equiprobable classes
• shows the variations of p(x|wi ), i = 1, 2, as functions of x
for the simple case of a single feature (l = 1).
• The dotted line at x 0 is a threshold partitioning the
feature space into two regions, R 1 and R 2 .
• According to the Bayes decision rule, for all values of x in
R1 the classifier decides w1 and for all values in R2 it
decides w2 .
• decision errors are unavoidable
• There is a finite probability for an x to lie in the R2 region
and at the same time to belong in class w1 . The same is
true for points originating from class w2 .
• The total probability, Pe , of committing a decision error for
the case of two equiprobable classes
• which is equal to the total shaded area under the curves
20
21.
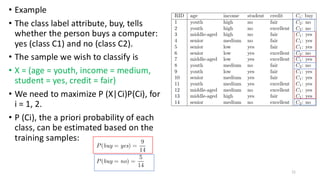
• Example
• Theclass label attribute, buy, tells
whether the person buys a computer:
yes (class C1) and no (class C2).
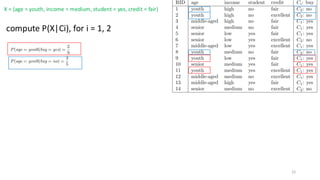
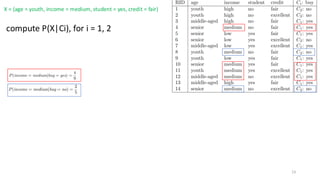
• The sample we wish to classify is
• X = (age = youth, income = medium,
student = yes, credit = fair)
• We need to maximize P (X|Ci)P(Ci), for
i = 1, 2.
• P (Ci), the a priori probability of each
class, can be estimated based on the
training samples:
21
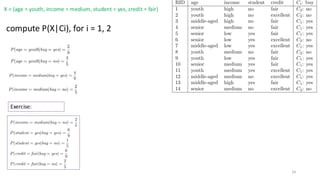
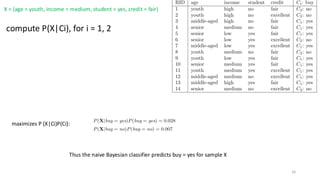
compute P(X|Ci), fori = 1, 2
maximizes P (X|Ci)P(Ci):
Thus the naive Bayesian classifier predicts buy = yes for sample X
X = (age = youth, income = medium, student = yes, credit = fair)
26
27.
Minimizing the AverageRisk
• The classification error probability is not always the best criterion to be adopted
for minimization.
• This is because it assigns the same importance to all errors.
• However, there are cases in which some wrong decisions may have more serious
implications than others.
• For example, it is much more serious for a doctor to make a wrong decision and a
malignant tumor to be diagnosed as a benign one, than the other way round.
• If a benign tumor is diagnosed as a malignant one, the wrong decision will be
cleared out during subsequent clinical examinations.
• However, the results from the wrong decision concerning a malignant tumor may
be fatal.
• Thus, in such cases it is more appropriate to assign a penalty term to weigh each
error.
27
28.
Minimizing the AverageRisk
• let us denote by w1 the class of malignant tumors and as w2 the class
of the benign ones.
• Let, also, R 1 , R 2 be the regions in the feature space where we
decide in favor of w1 and w2, respectively.
• we will now try to minimize:
28
• errors due to the assignment of patterns originating from class w1 to
class w2 should have a larger effect on the cost function than
the errors associated with the second term in the summation.
29.
• consider anM-class problem and let R j , j = 1, 2, . . . , M,
be the regions of the feature space assigned to classes w j
, respectively.
• If a feature vector x that belongs to class wk lies in Ri , i is
not k. Then this vector is misclassified in Ri and an error is
committed.
• The risk or loss associated with wk:
29
Minimizing the Average Risk
• the overall probability of a feature vector from
class wk being classified in wi .
• This is a weighted probability
• Our goal now is to choose the partitioning regions R
j so that the average risk is minimized.























































![[DSC Europe 25] Josip Saban - Career building for data professionals.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/zroflcttkm1vmli0txea-josip-saban-career-building-for-data-professionals-260123083019-587cdb8c-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DSC Europe 25] Milos Belcevic - Product Professional's Journey to Full-Stack...](https://cdn.slidesharecdn.com/ss_thumbnails/1zovd6fgsycdg4wvgvls-milos-belcevic-product-professionals-journey-to-full-stack-product-developer-260123083019-d993120d-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Raul Cruz Bonilla - Harnessing GEN AI in Fashion, Luxury and ...](https://cdn.slidesharecdn.com/ss_thumbnails/me7nvup5thwqzwzblbvw-raul-cruz-harnessing-ai-en-luxury-260123083019-32ac5a43-thumbnail.jpg?width=640&height=640&fit=bounds)



