The document discusses linear programming (LP) and the simplex method for solving LP problems. It provides the following key points:
- LP is simpler than nonlinear programming and many problems can be formulated as LP problems.
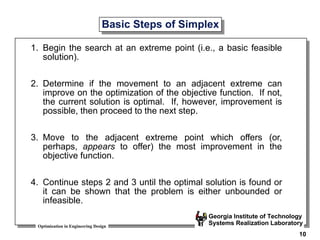
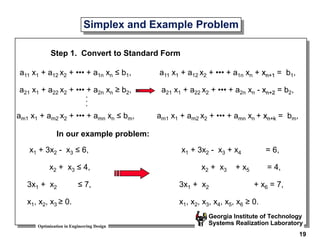
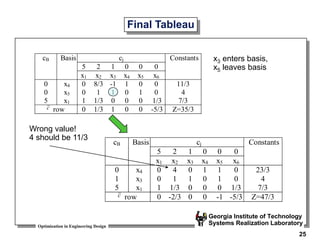
- The simplex method provides an efficient systematic approach to solve LP problems by moving between extreme points in finite steps.
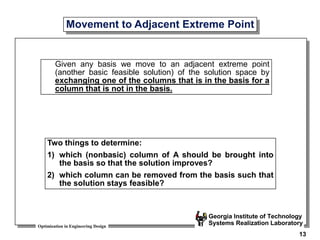
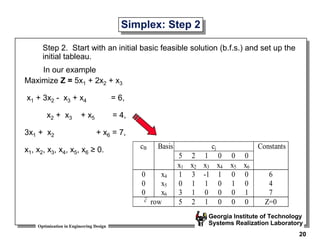
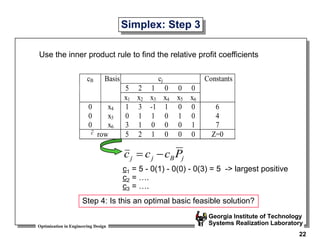
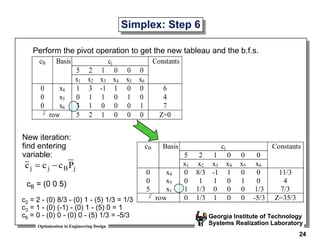
- The simplex method works by starting at an initial basic feasible solution and iteratively moving to adjacent extreme points to optimize the objective function, until an optimal solution is found.
- George Dantzig developed the simplex method in 1947 to solve military planning problems, establishing it as the most commonly used algorithm for solving LP problems.
![Optimization in Engineering Design
Georgia Institute of Technology
Systems Realization Laboratory
3
Bolted Joint Design
Given
At - tensile strength area, function of d
Db - bolt circle diameter
Pt - total load
C - joint constant
Fi - preload (= 0.75 Sp At)
Find
N - number of bolts, Sp - proof strength, d - diameter
Satisfy
3d Db / N good wrench rule
Db / N 6d good seal rule
C Pt / N Sp At - Fi static loading constraint
Fi (1 - C) Pt / N joint separation constraint
Minimize Z= [ f1(N, d, Sp), f2(N, d, Sp), ..]
Question:
Is this a linear or
nonlinear model?](https://image.slidesharecdn.com/lp-220913024409-fa8eea0e/85/LP-ppt-3-320.jpg)
![Optimization in Engineering Design
Georgia Institute of Technology
Systems Realization Laboratory
4
Bolted Joint Design (2)
Given
d - diameter
At - tensile strength area, function of d
Db - bolt circle diameter
Pt - total load
C - joint constant
Fi - preload (= 0.75 Sp At)
Find
N - number of bolts, Sp - proof strength
Satisfy
3d Db / N good wrench rule
Db / N 6d good seal rule
C Pt / N Sp At - Fi static loading constraint
Fi (1 - C) Pt / N joint separation constraint
Minimize Z= [ f1(N, Sp), f2(N, Sp), ..]
Question:
Is this a linear or
nonlinear problem?](https://image.slidesharecdn.com/lp-220913024409-fa8eea0e/85/LP-ppt-4-320.jpg)