Download as PDF, PPTX

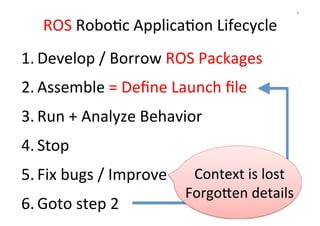
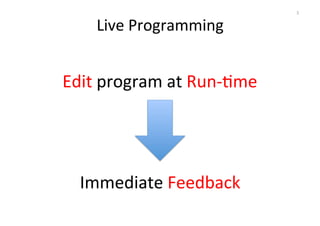
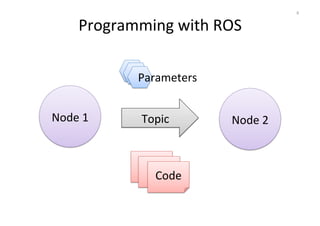
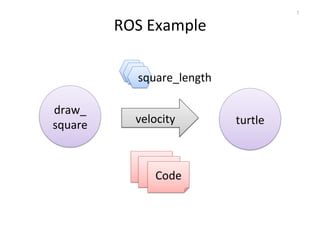
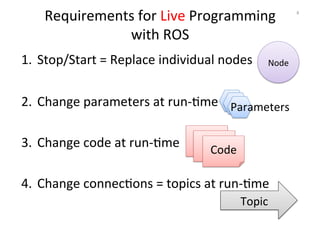
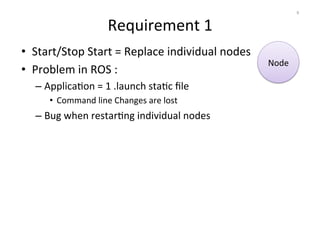
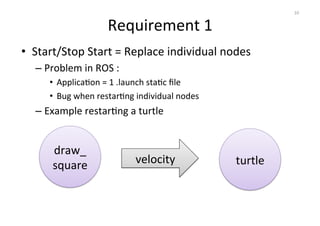
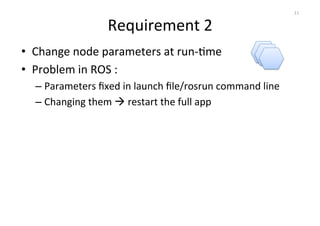
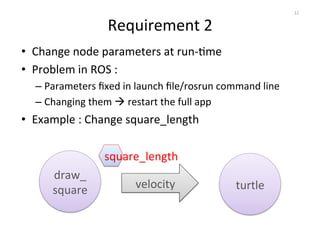
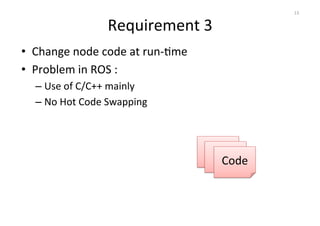
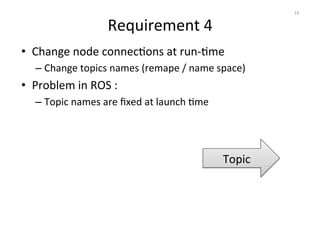
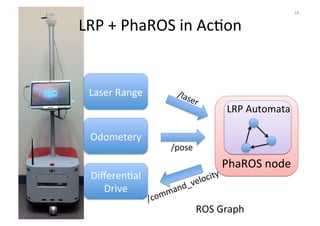
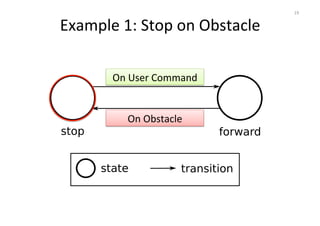
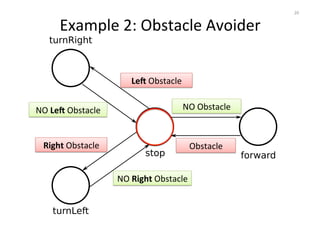

The document proposes a live programming approach for the Robot Operating System (ROS) using PhaROS and LRP. It identifies limitations of ROS for live programming like static launch files and lack of hot code swapping. The approach integrates a domain specific language for hierarchical state machines called LRP with PhaROS, a ROS client for the Pharo programming language. This allows ROS nodes to be developed in Pharo and everything to happen at runtime, enabling live parameter changes, code updates, and connection changes for ROS applications. Examples of using this approach include a robot that stops on obstacles and an obstacle avoider behavior.