The document outlines control engineering concepts focused on first and second-order systems, specifically discussing step and impulse responses using MATLAB functions. It includes MATLAB code for analyzing a closed-loop speed tachometer control system with external disturbances, detailing system parameters and output characteristics. The results indicate the steady-state error and system response over time for the specified control setup.
![MATLAB Control Functions
step (num,den) : To plot the step response of the system
impulse(num,den) : To plot the impulse response of the system.
[y,x,t]=step(num,den): To store the values of the step response
function in an array.
ym=max(y): To get the maximum amplitude of a response value.
ys = dcgain(num,den) : To get the d.c. gain of the system (steady state
value)
yovrsht = (ym-yt)/ys * 100; To calculate the % over shoot.](https://image.slidesharecdn.com/lecture07081st2ndordercontrolsystems1-240607131609-494b1484/75/Lecture-07-08_1st-2nd-Order-Control-Systems-1-pptx-13-2048.jpg)
![5.2.1 MATLAB Code for the Open-loop without
tachometer feedback of the above example
(Case-I)
• % ---------------------------------------------------------------------------MEEN-4263 Control Engineering Lab -------------------------------------------------------------
• % Author : Engr. Adnan Rasheed
• % Date : xxxxxxxx
• % Lab No. : 5
• % Class : BEMTS VI (A & B)
• % File name : opentach.m
• % Description : The function implements the speed tachometer example.
• %------------------------------------------------------------------------------------- % Define Tachometer control system parameters
• Ra = 1; Km = 10; J= 2; b = 0.5; Kb = 0.1; Ka = 54; Kt = 1;
• num1 = [1]; den1 = [J b]; % Define G(s)= 1 / Js+b
• num2 = [Km*Kb/Ra]; den2 = [1]; % Define H(s) = Km*Kb/Ra
• [num,den] = feedback(num1,den1,num2,den2); % Find the T(S)= w(s) / Td(s)
• num = -num % Change the sign of T(s) since Td(s) is negative
• printsys(num,den); % print the final T(S)
• [step_resp,x,t] = step(num,den); % Compute response to step disturbance
• figure plot(t,step_resp); % plot step response
• title('Open-loop Disturbance Step Response');
• xlabel('time[sec]'); ylabel('speed'); grid;
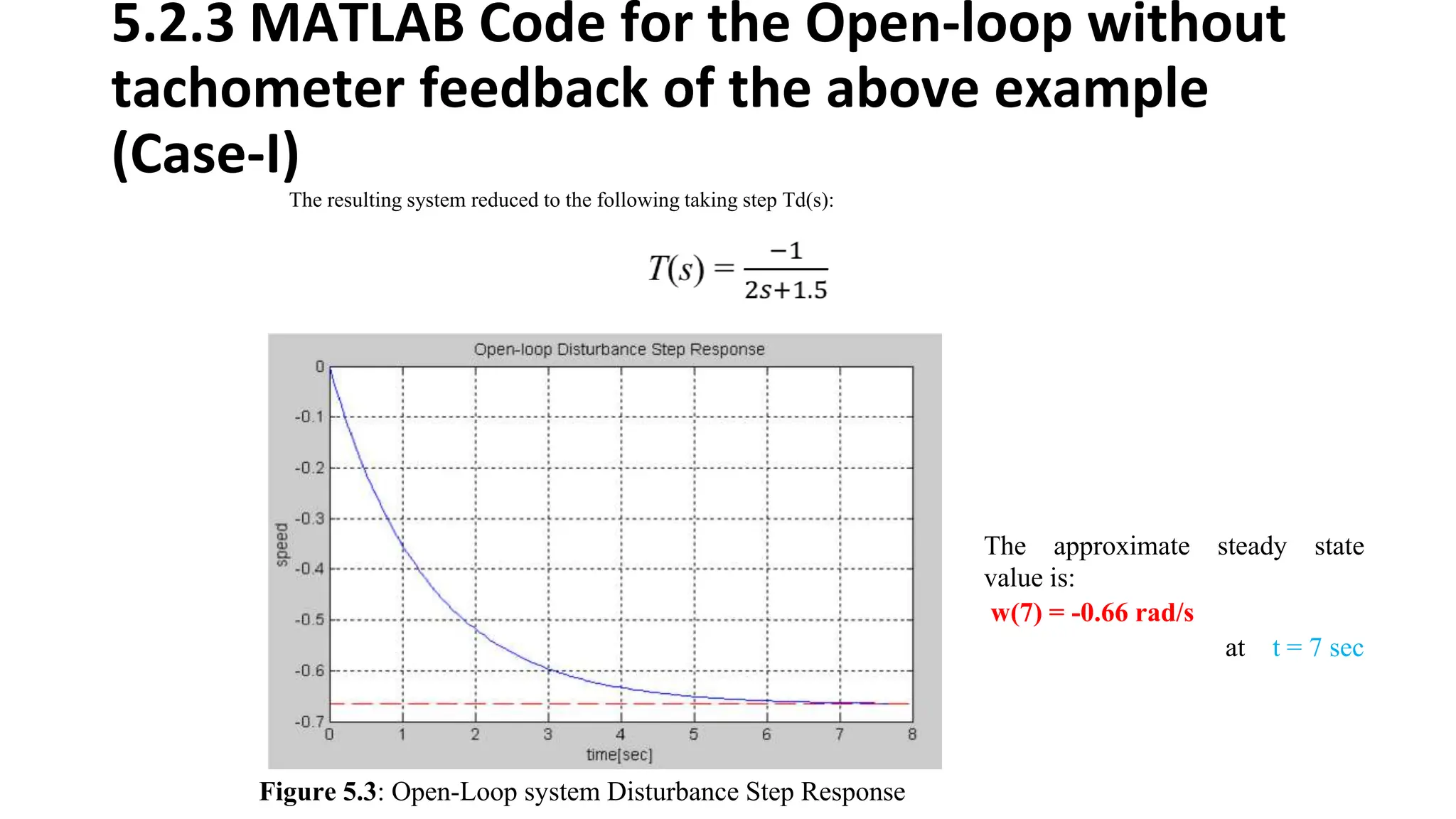
• Final_val = step_resp(length(t)) % Find steady-state error, last value of output
• %-------------------------------------------------------------------------------------
• % End Function
• %-------------------------------------------------------------------------------------](https://image.slidesharecdn.com/lecture07081st2ndordercontrolsystems1-240607131609-494b1484/75/Lecture-07-08_1st-2nd-Order-Control-Systems-1-pptx-15-2048.jpg)