Downloaded 41 times

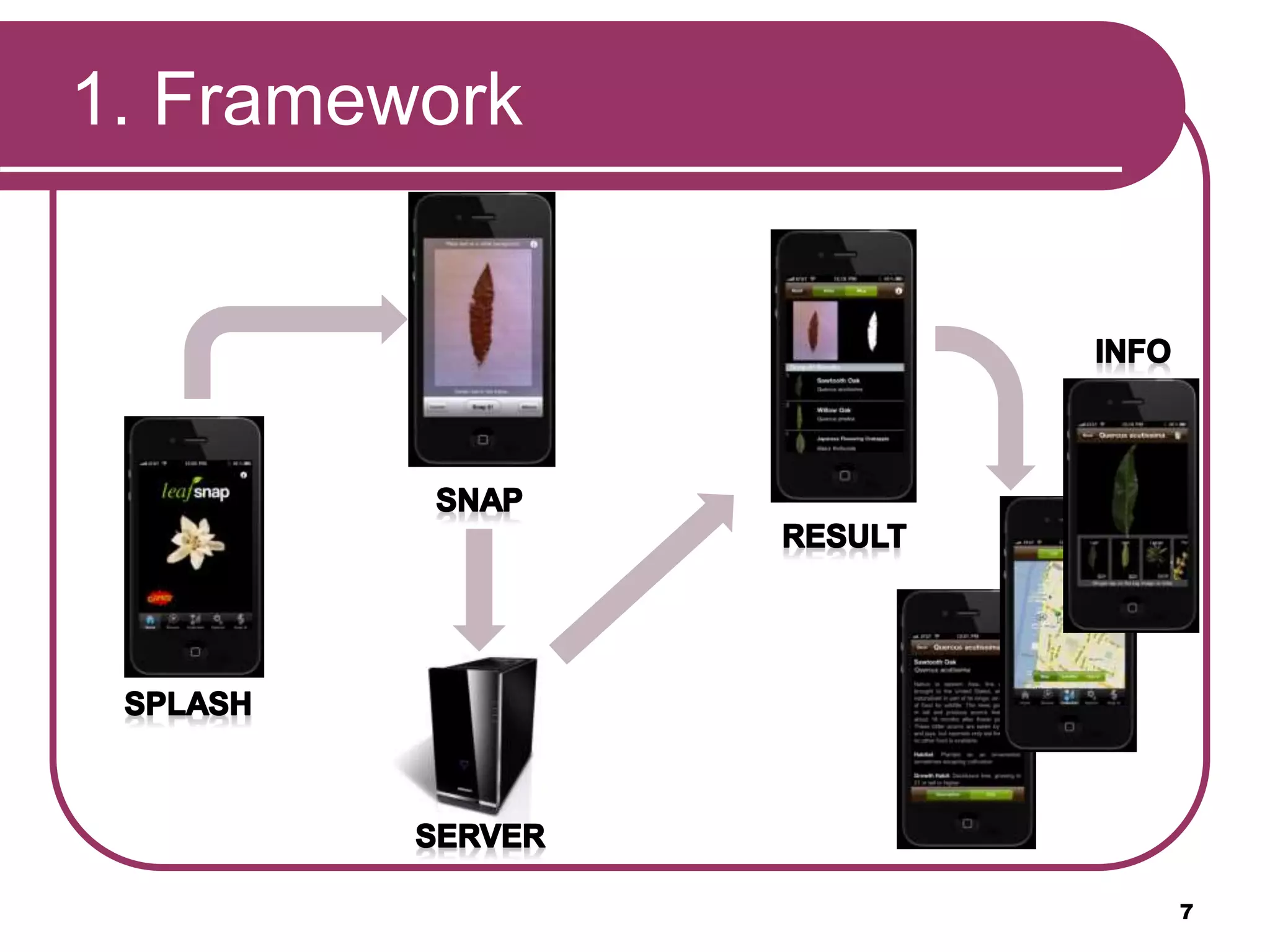
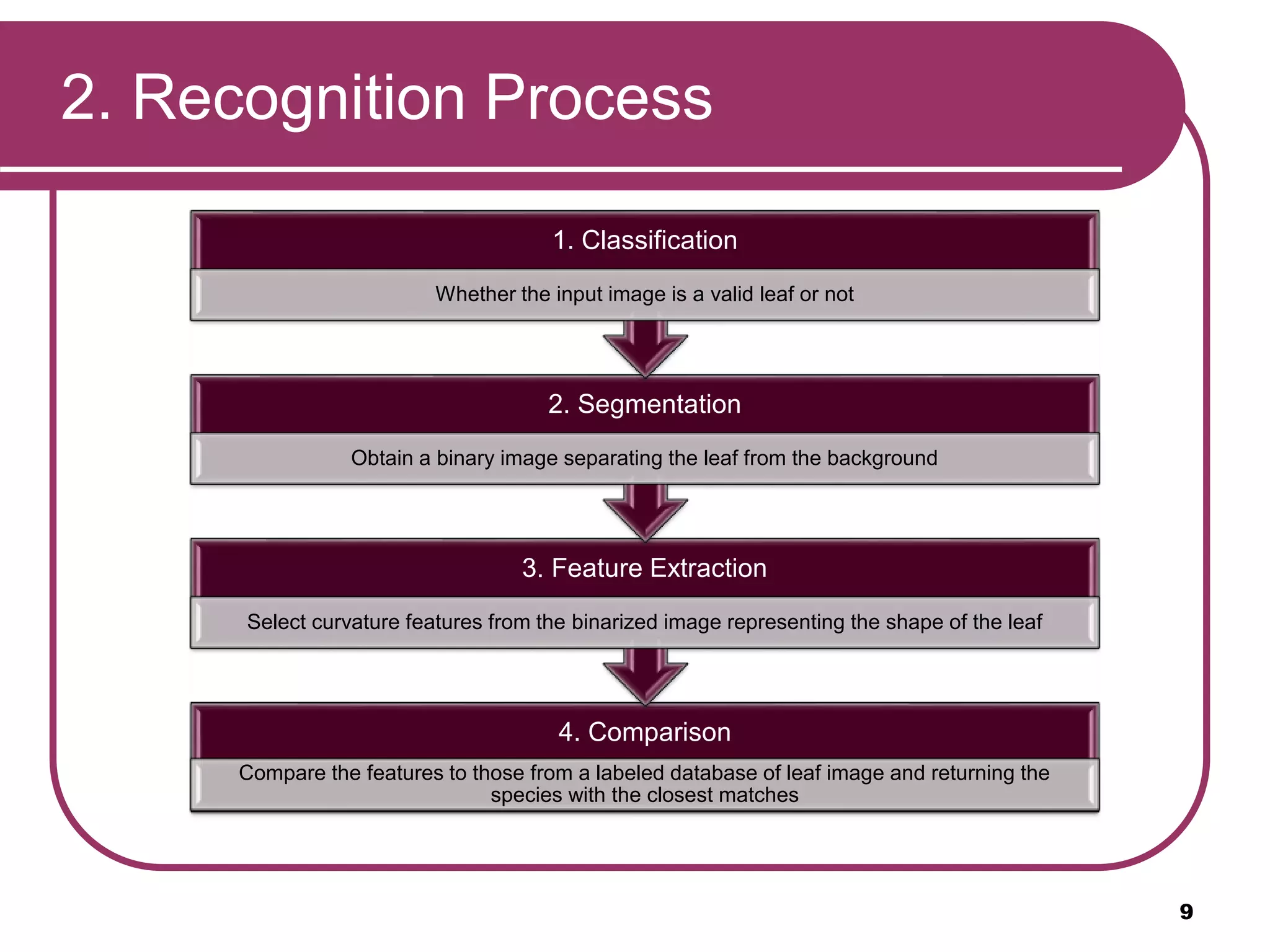

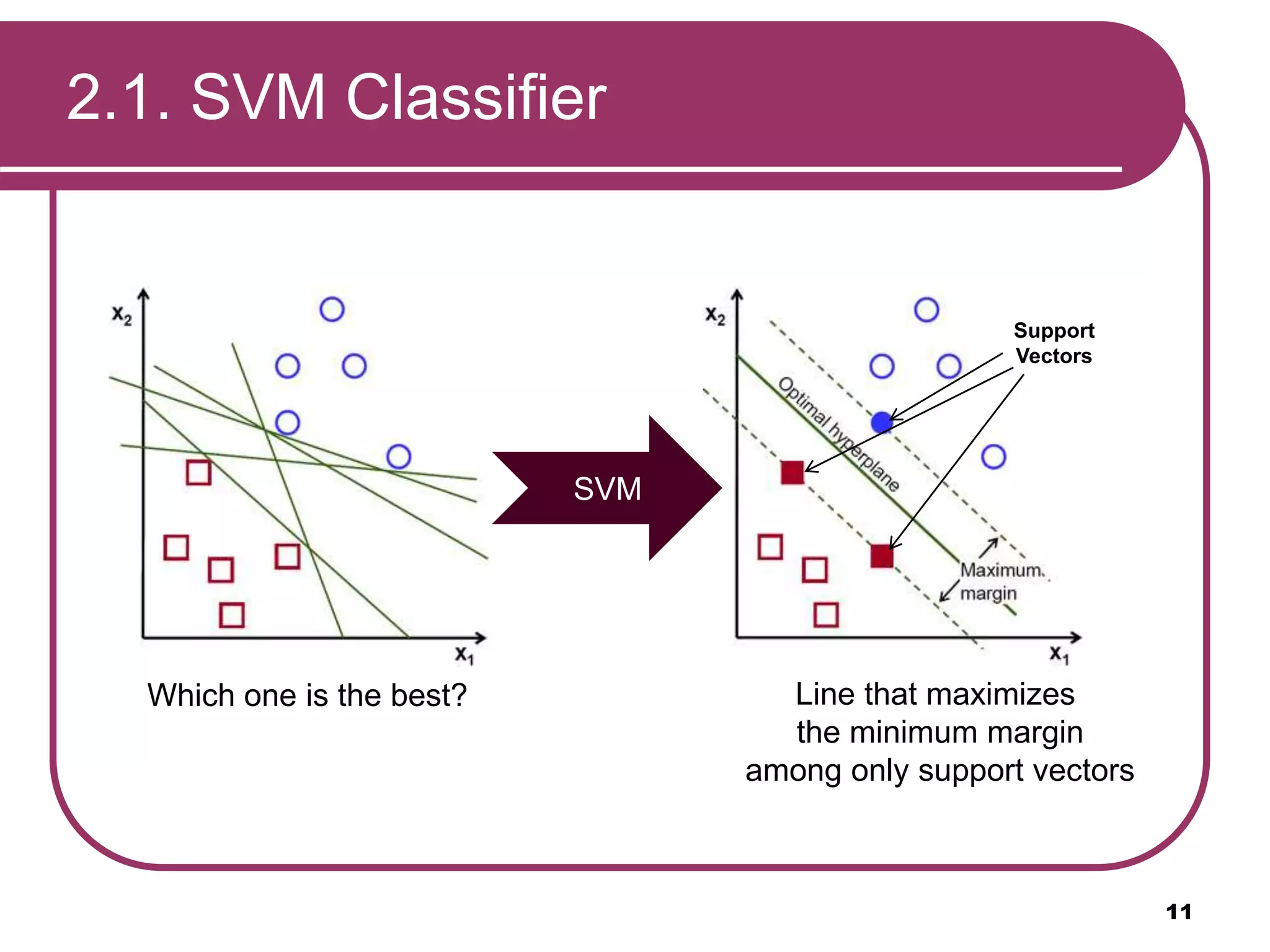
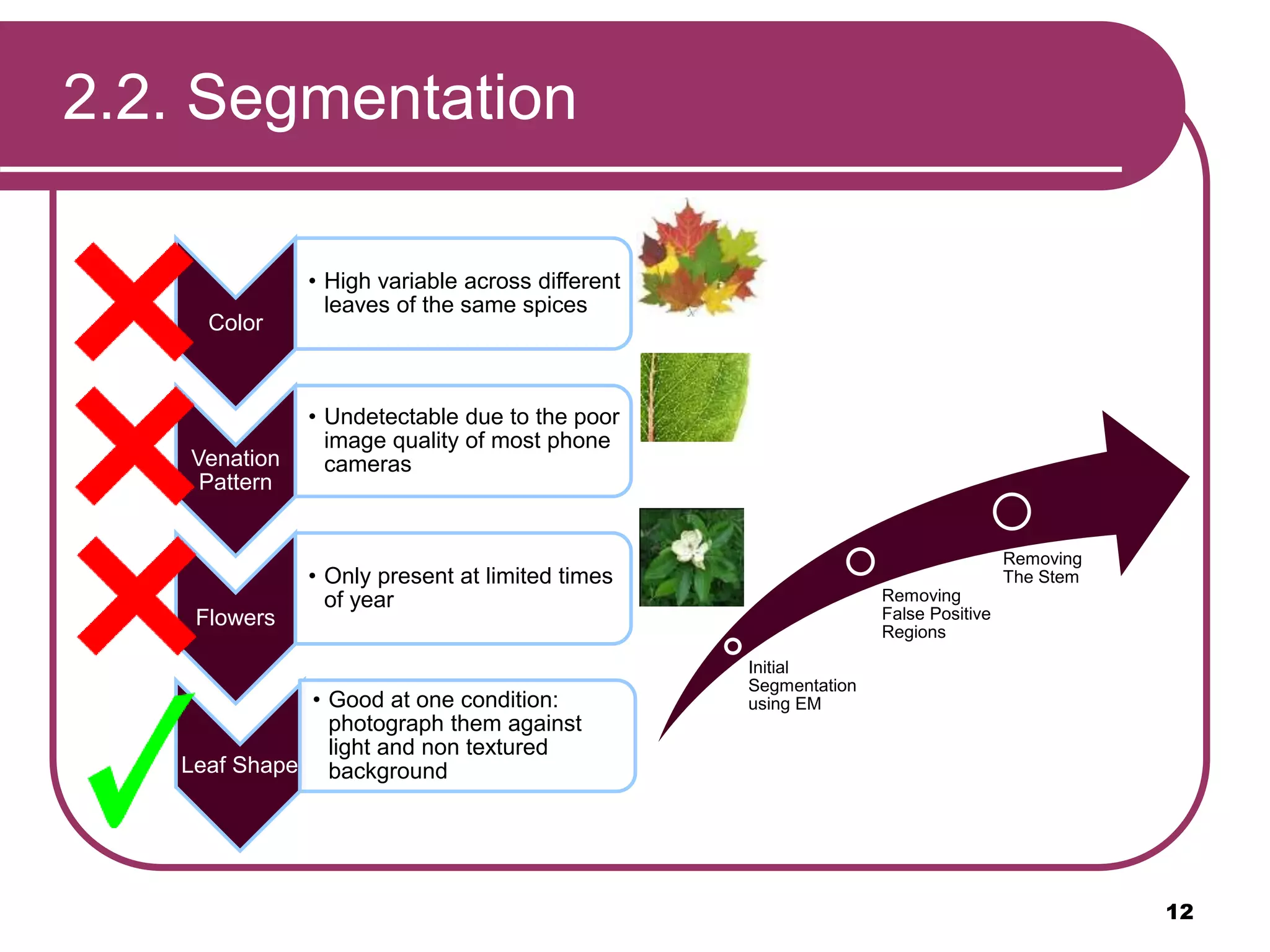
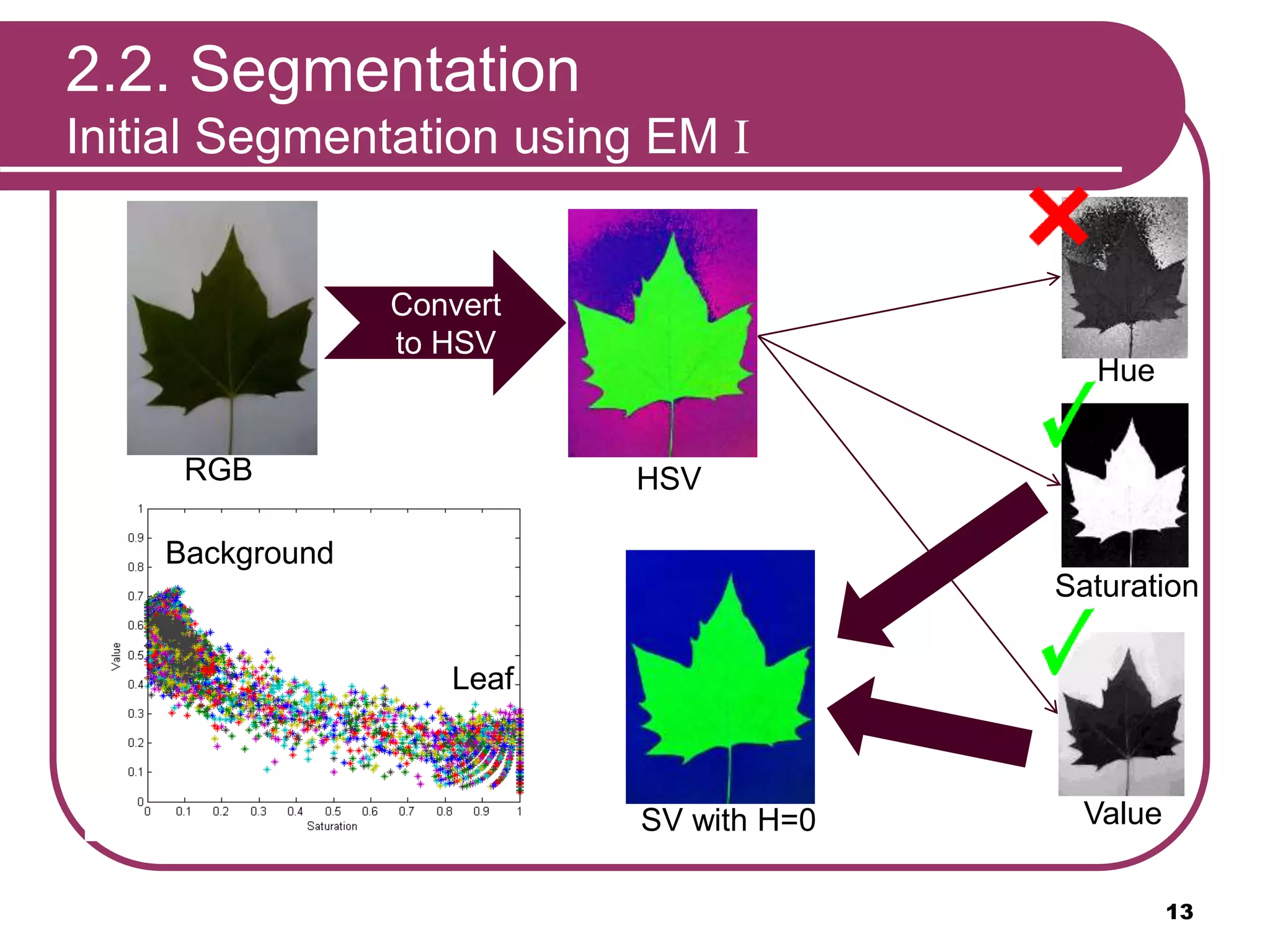
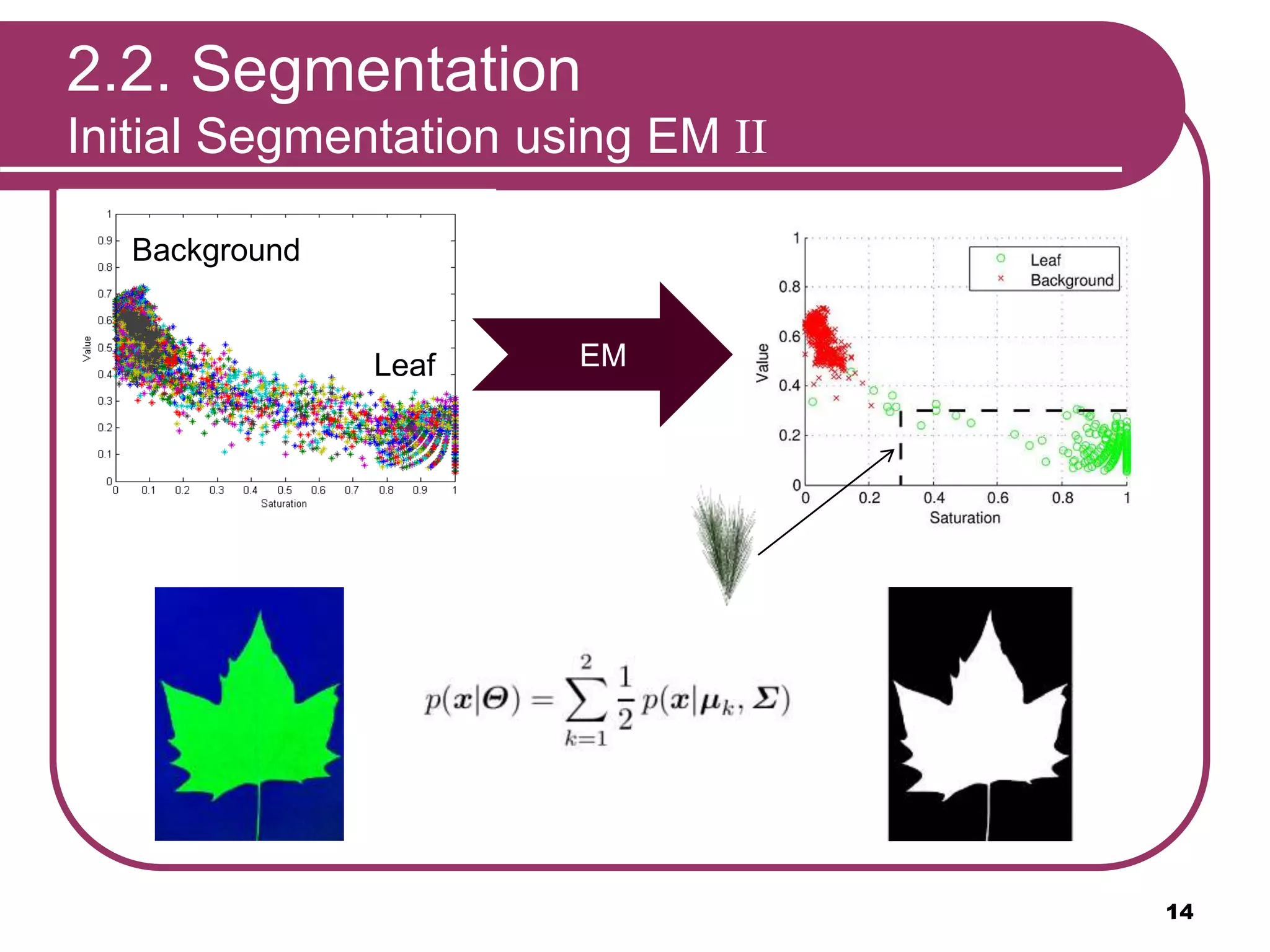
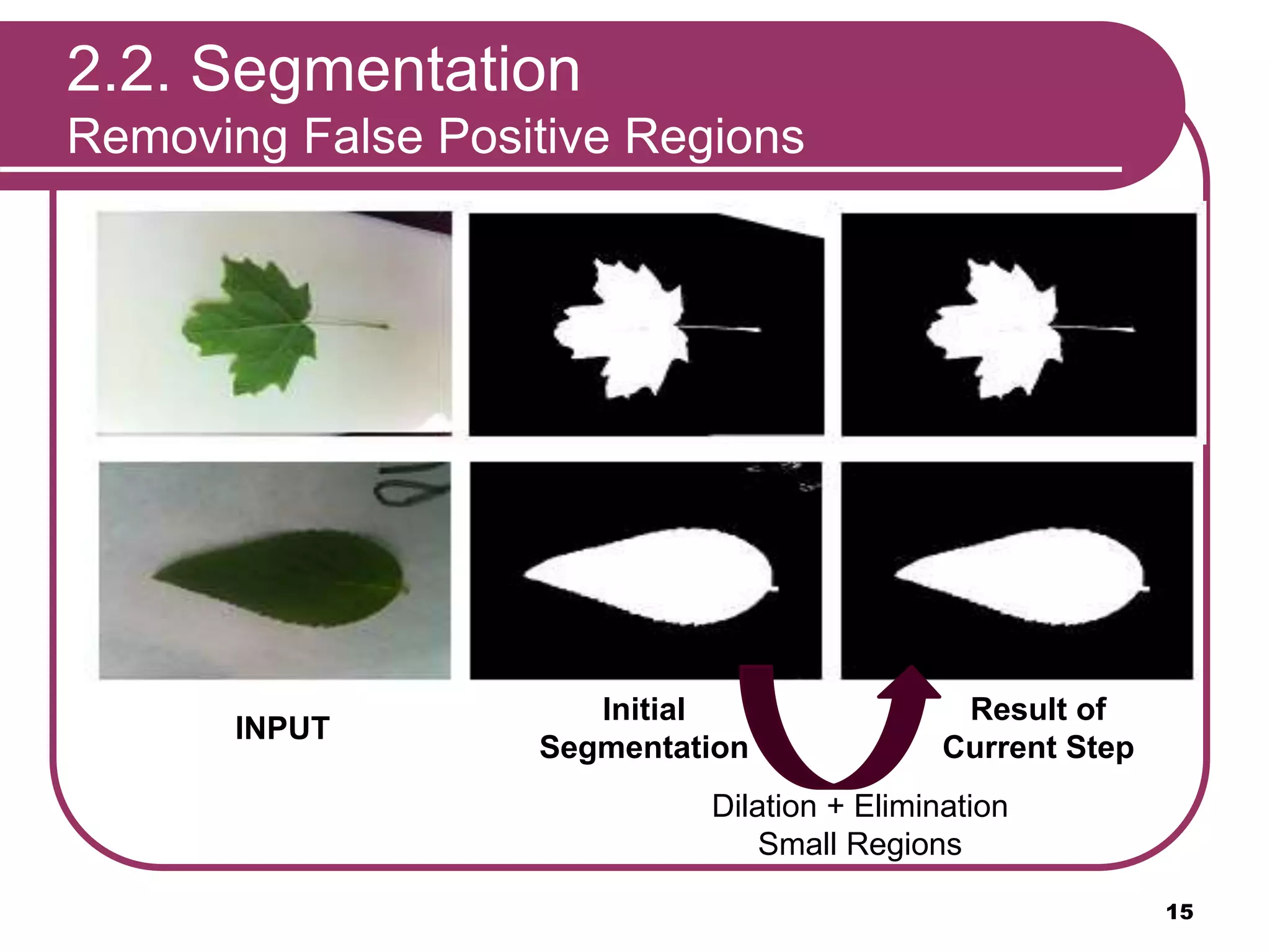
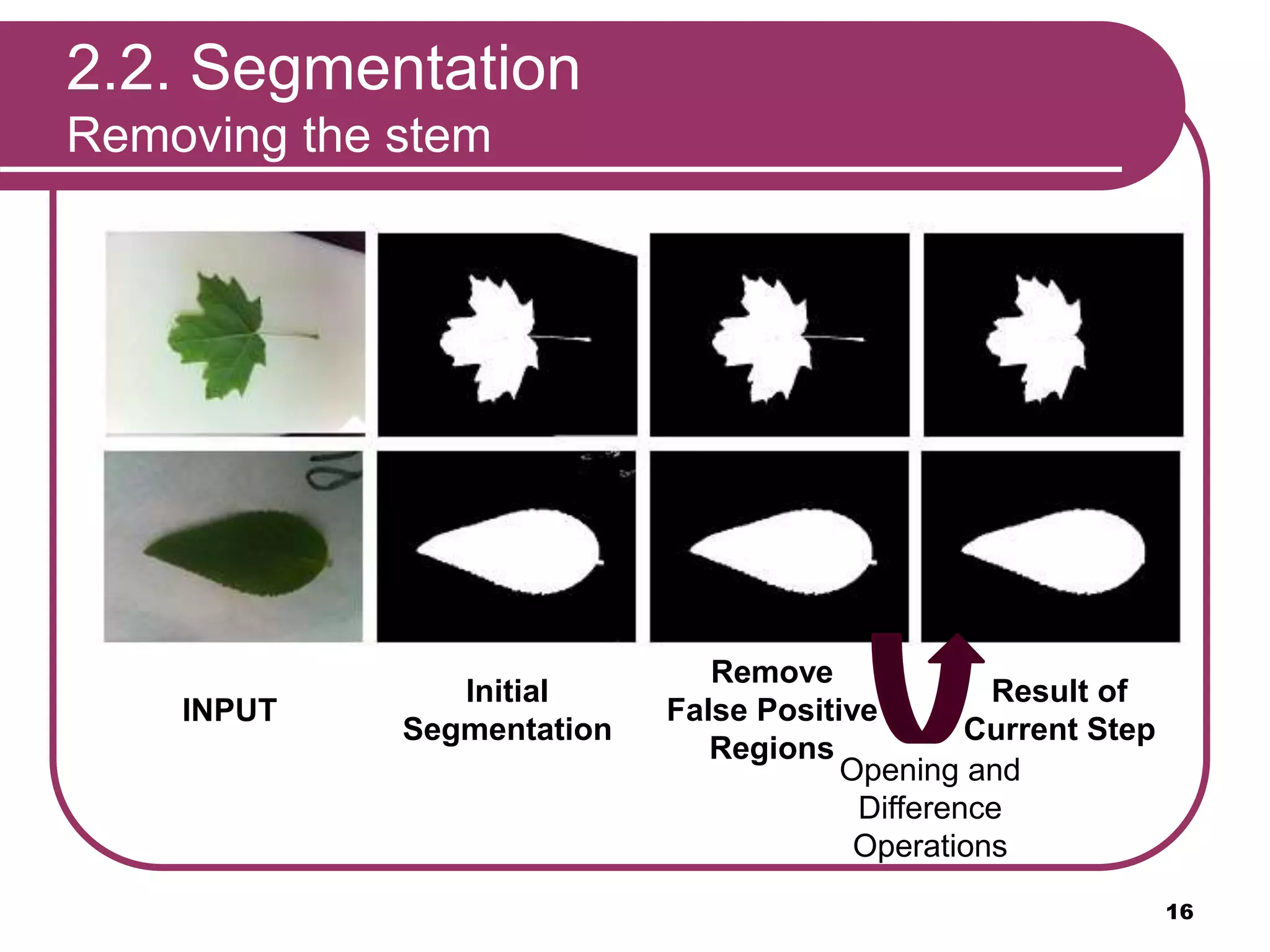
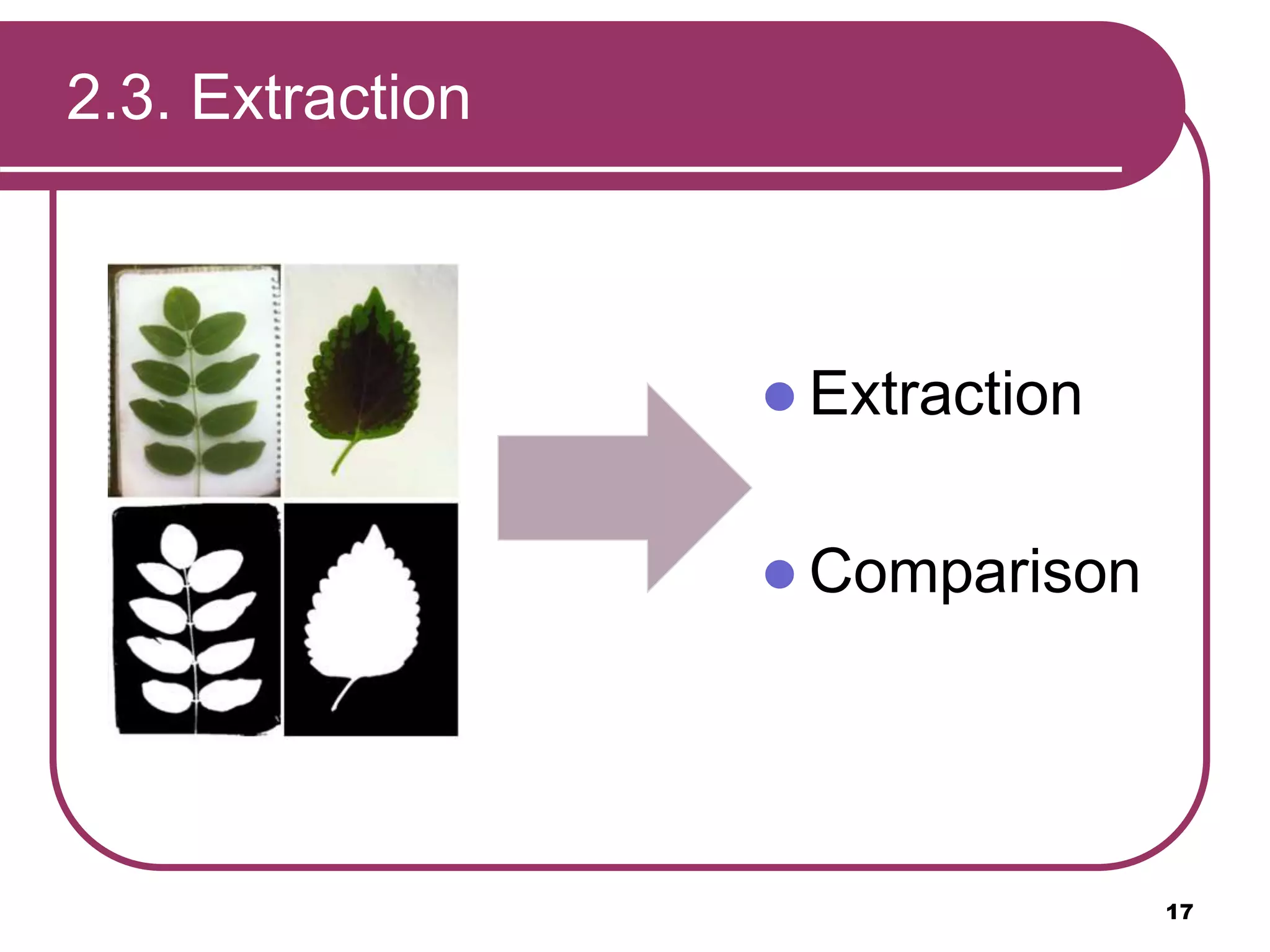
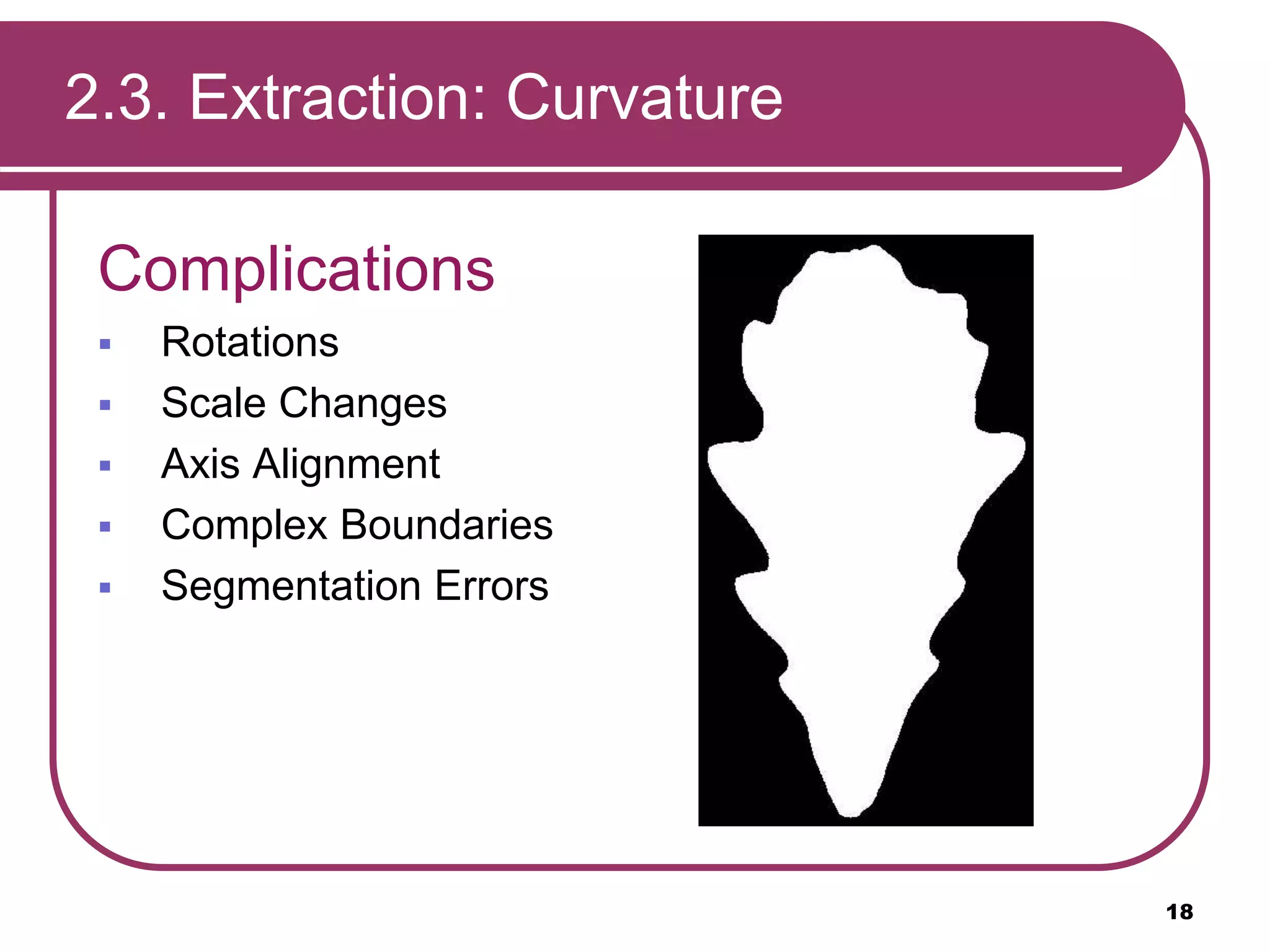
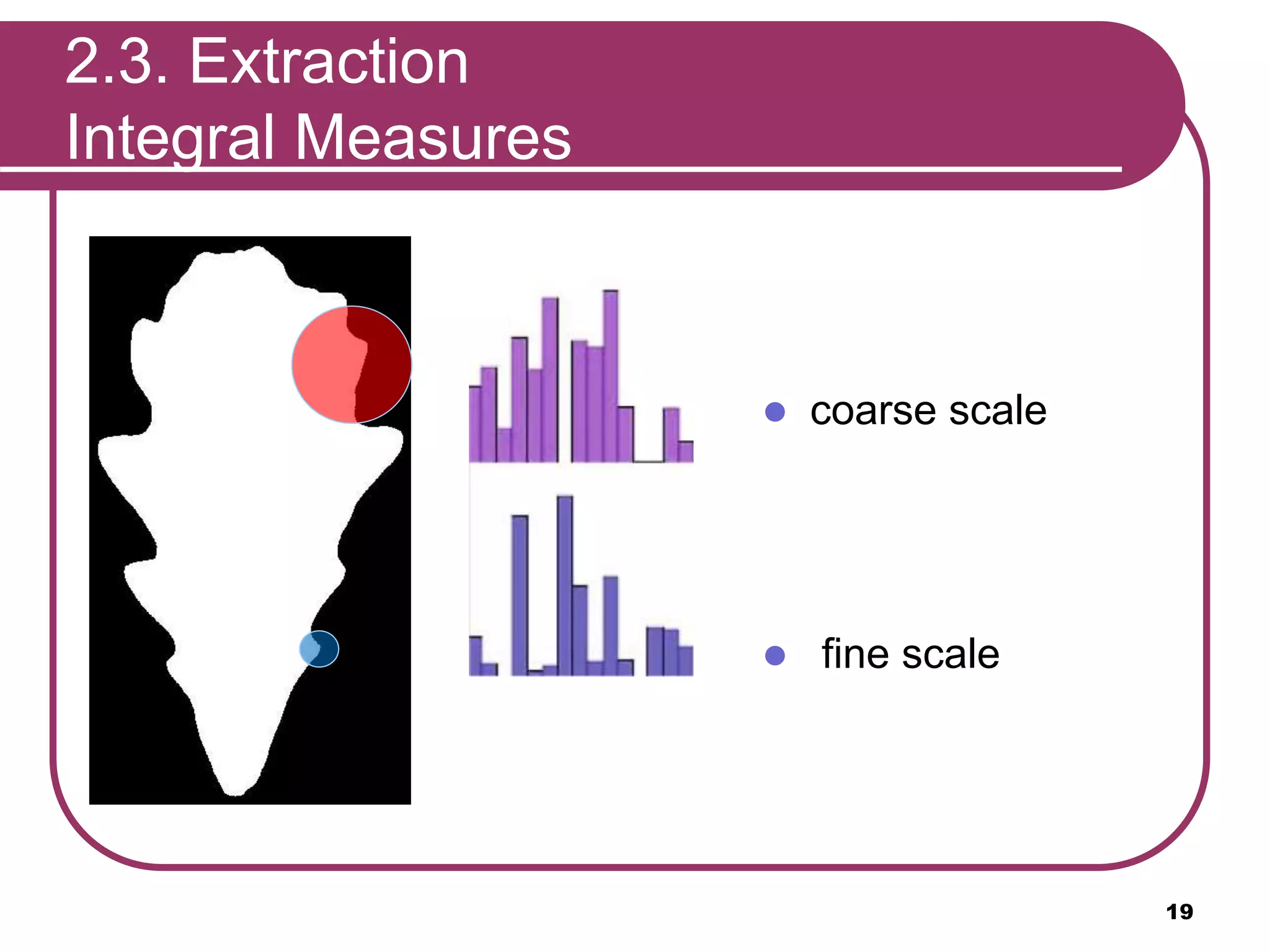
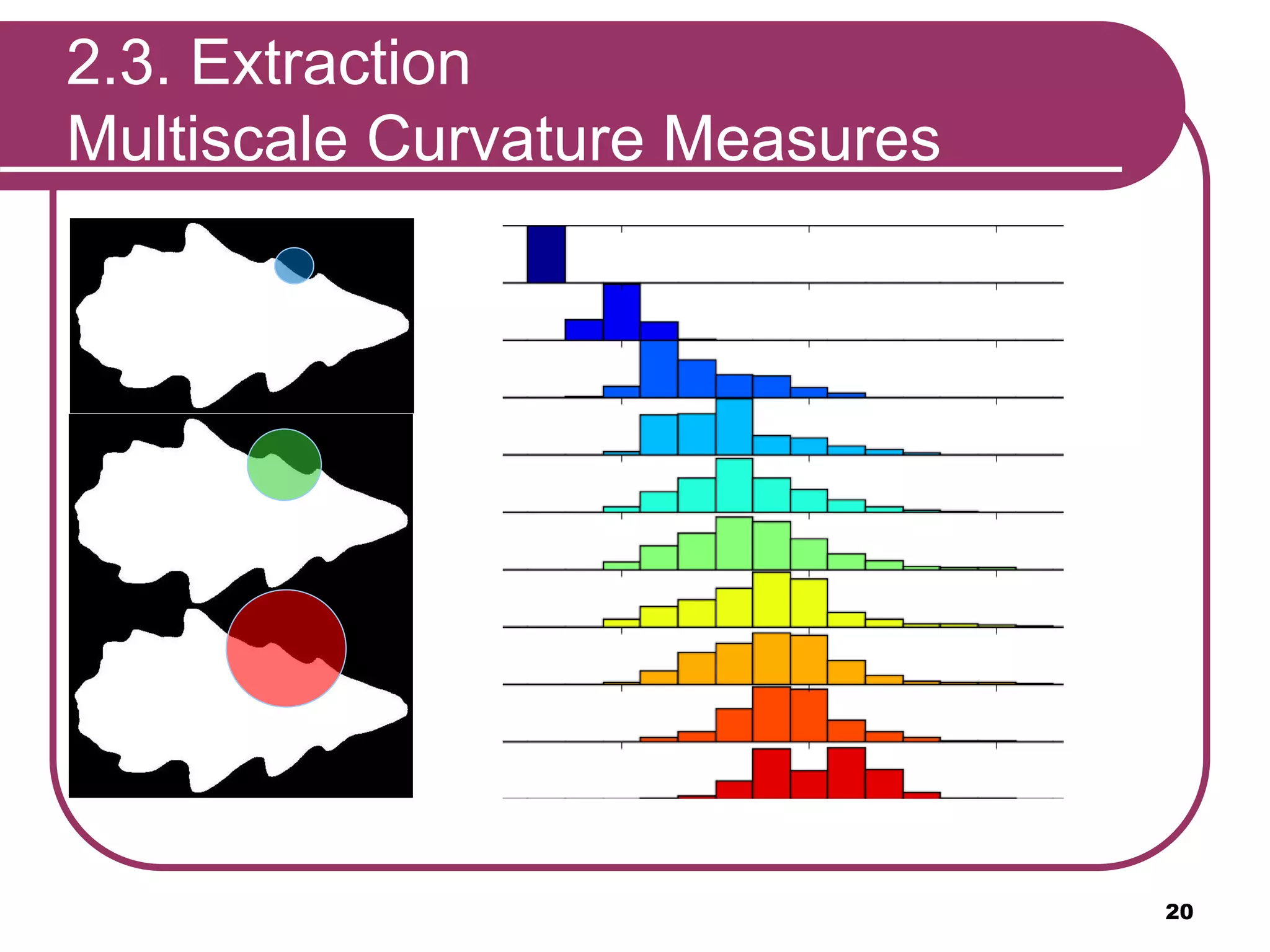
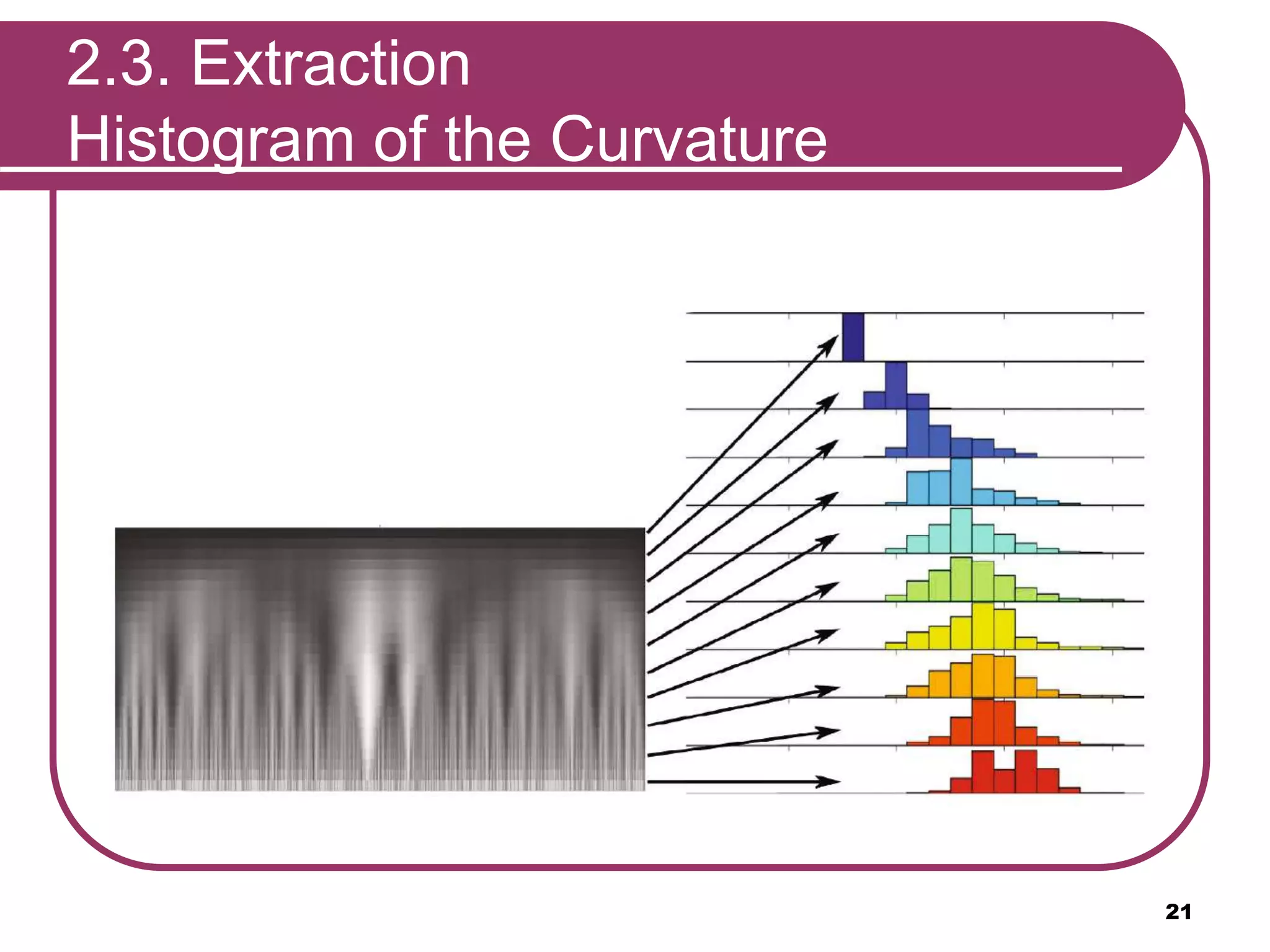
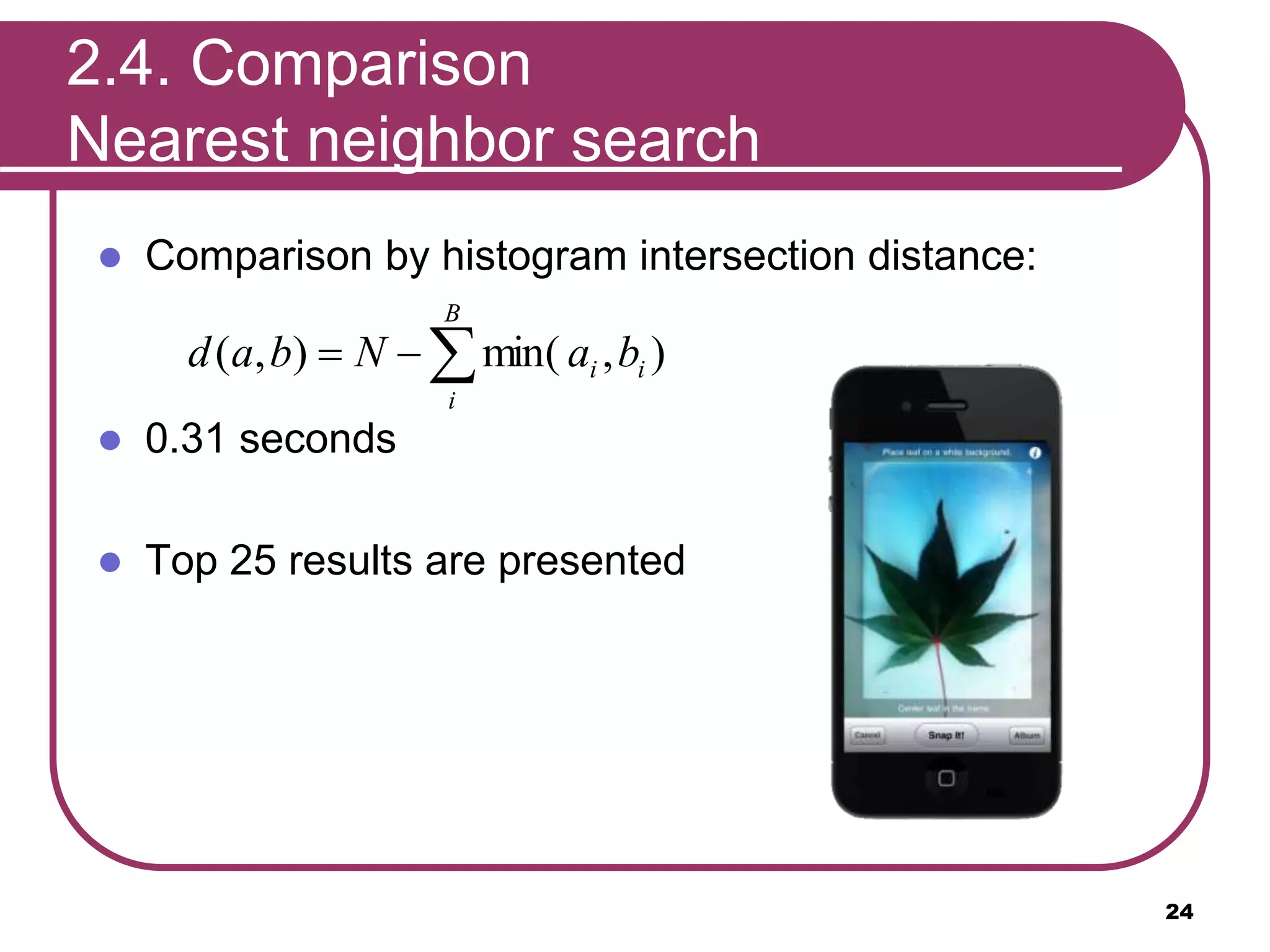

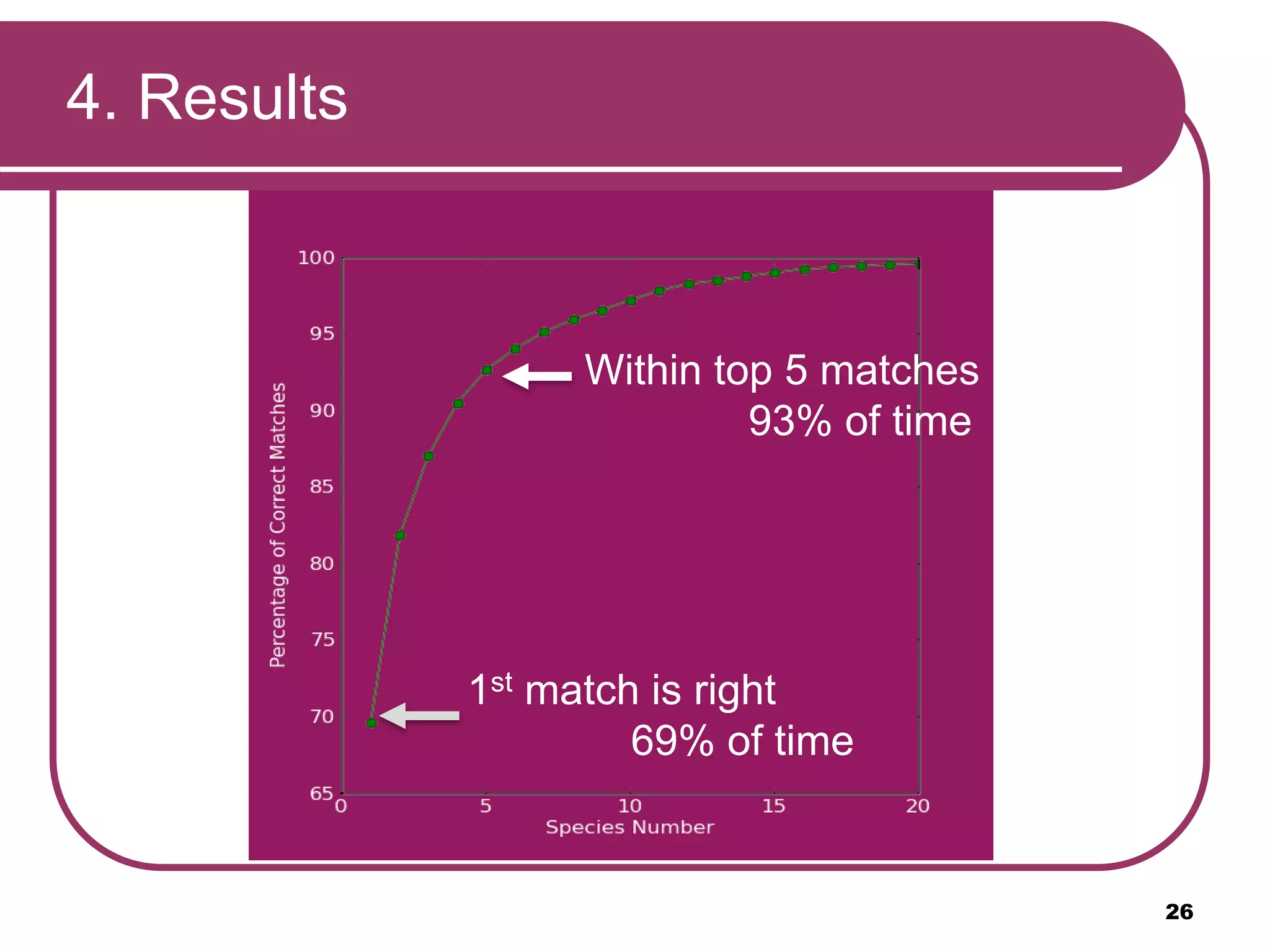




This document summarizes a research paper on Leafsnap, a computer vision system for automatic plant species identification. The system uses a classification algorithm to determine if an input image is a leaf or not. It then segments the leaf from the background and extracts curvature features from the leaf image. These features are compared to a labeled database of leaf images to identify the plant species with the closest matches. The system was able to correctly identify the first match 69% of the time and a match within the top 5 93% of the time. Future work will focus on identifying more plant species and applications for education and environmental monitoring.













































![[Tech Talks] IT Celebrities: Industry Oriented](https://cdn.slidesharecdn.com/ss_thumbnails/itcelebritiestalk-110530175202-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



















