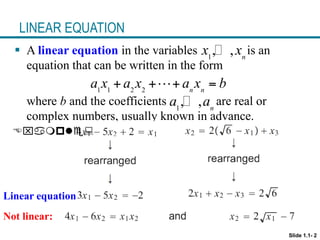
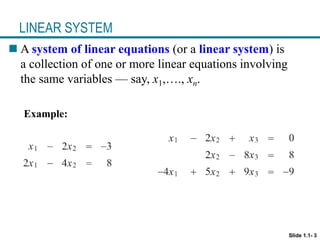
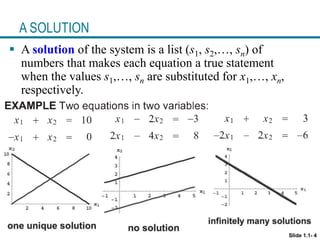
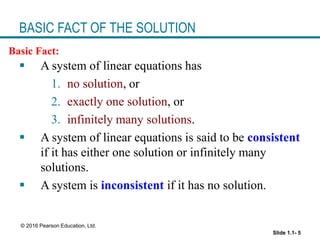
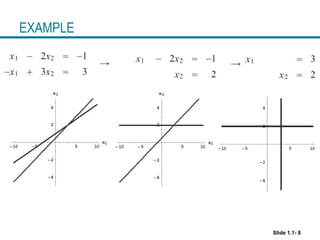
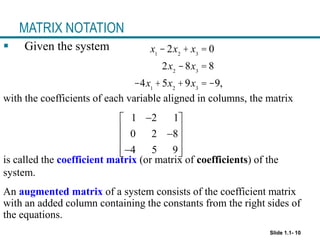
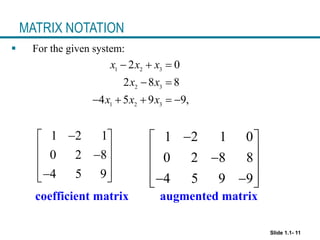
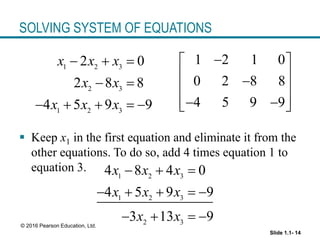
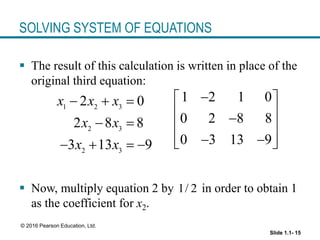
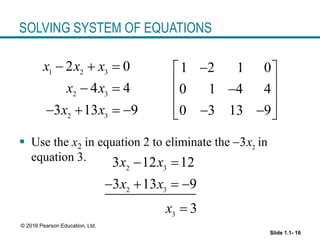
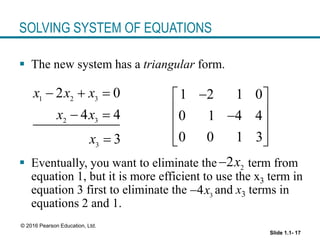
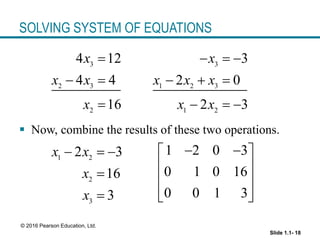
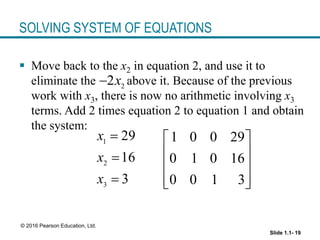
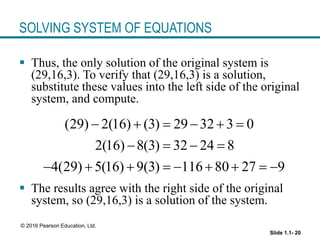
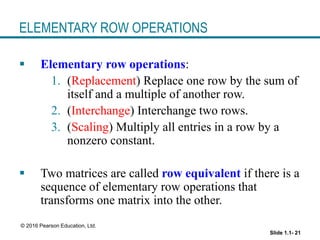
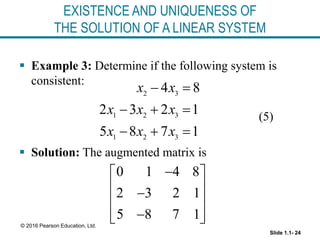
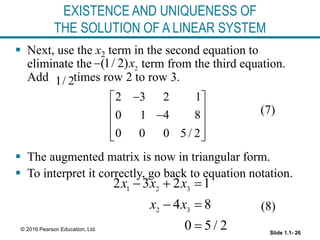
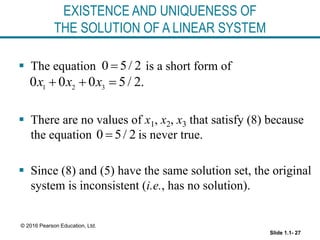
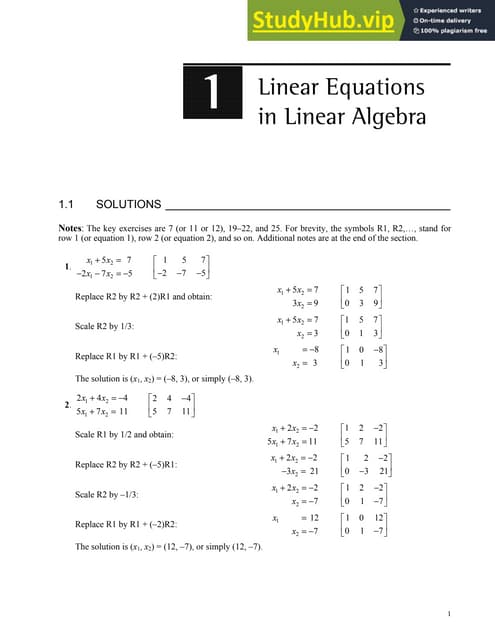
This document discusses systems of linear equations and their solutions. It begins by defining a linear equation and system of linear equations. A solution to a linear system is a set of values that satisfies all equations in the system simultaneously. A system can have no solution, a unique solution, or infinitely many solutions. Matrix notation is introduced as a way to compactly represent linear systems. Elementary row operations are defined as operations that preserve the solution set of a linear system. These operations can be used to transform a system into triangular form to determine whether it has a unique solution or no solution.