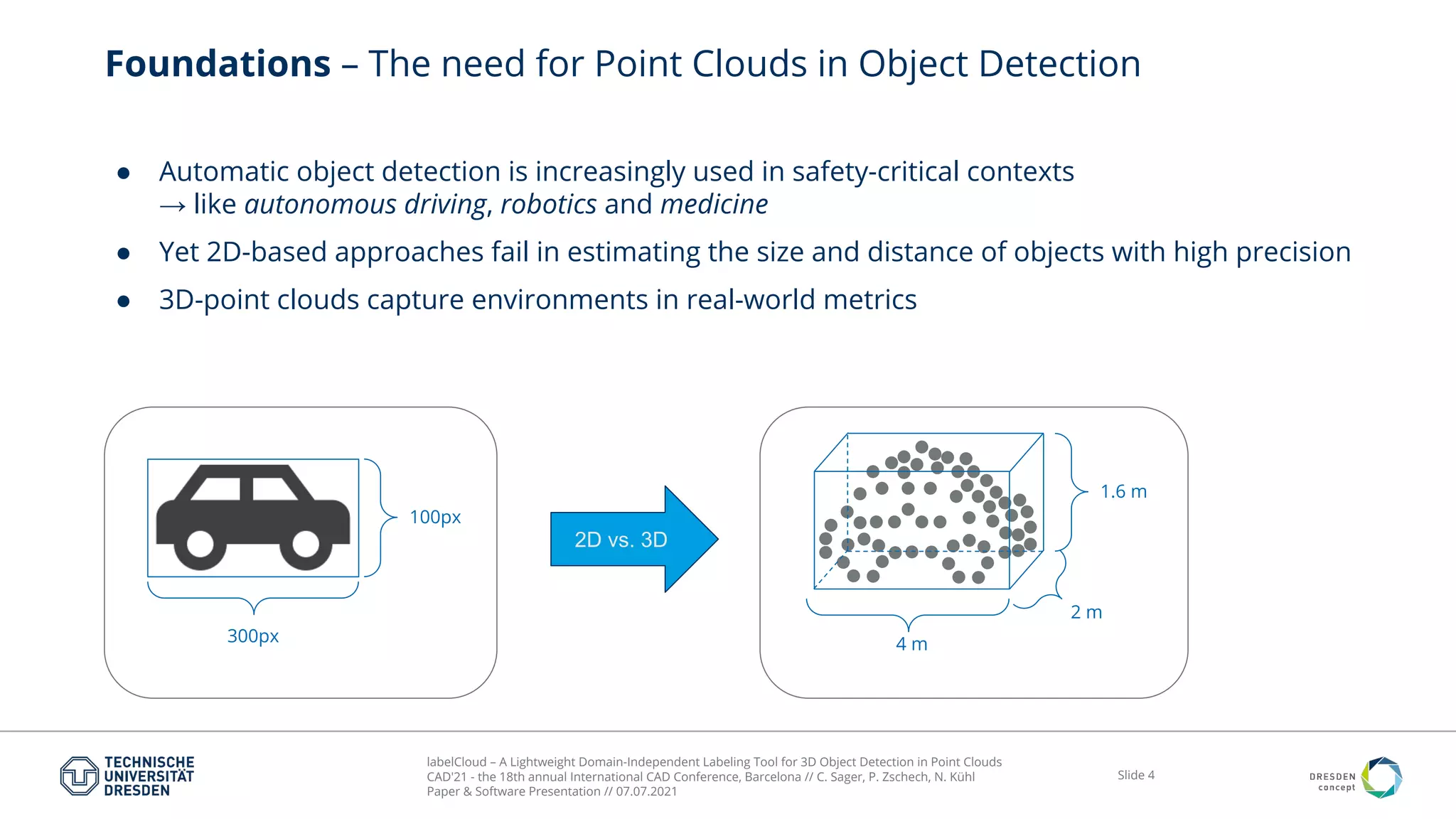
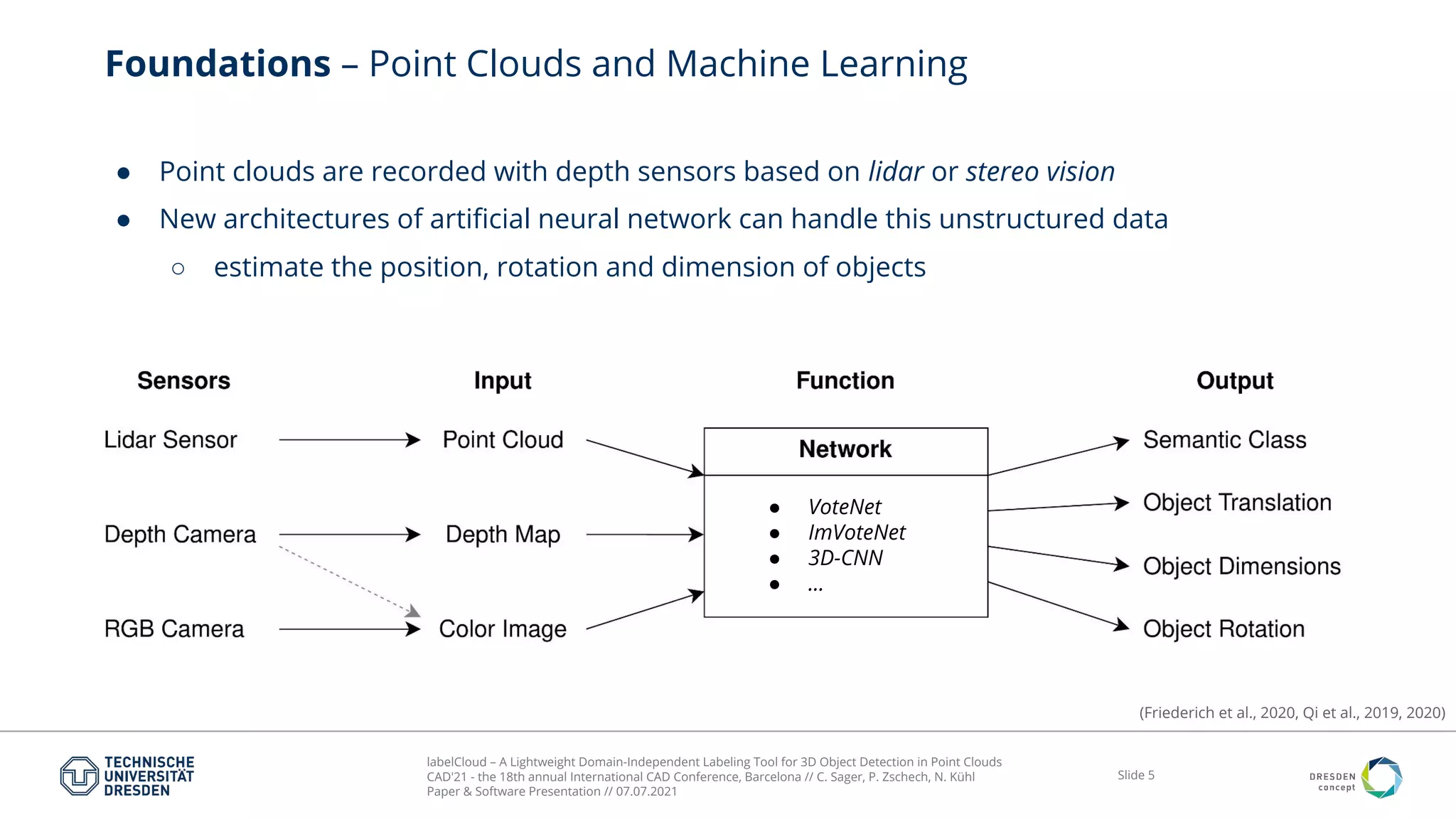
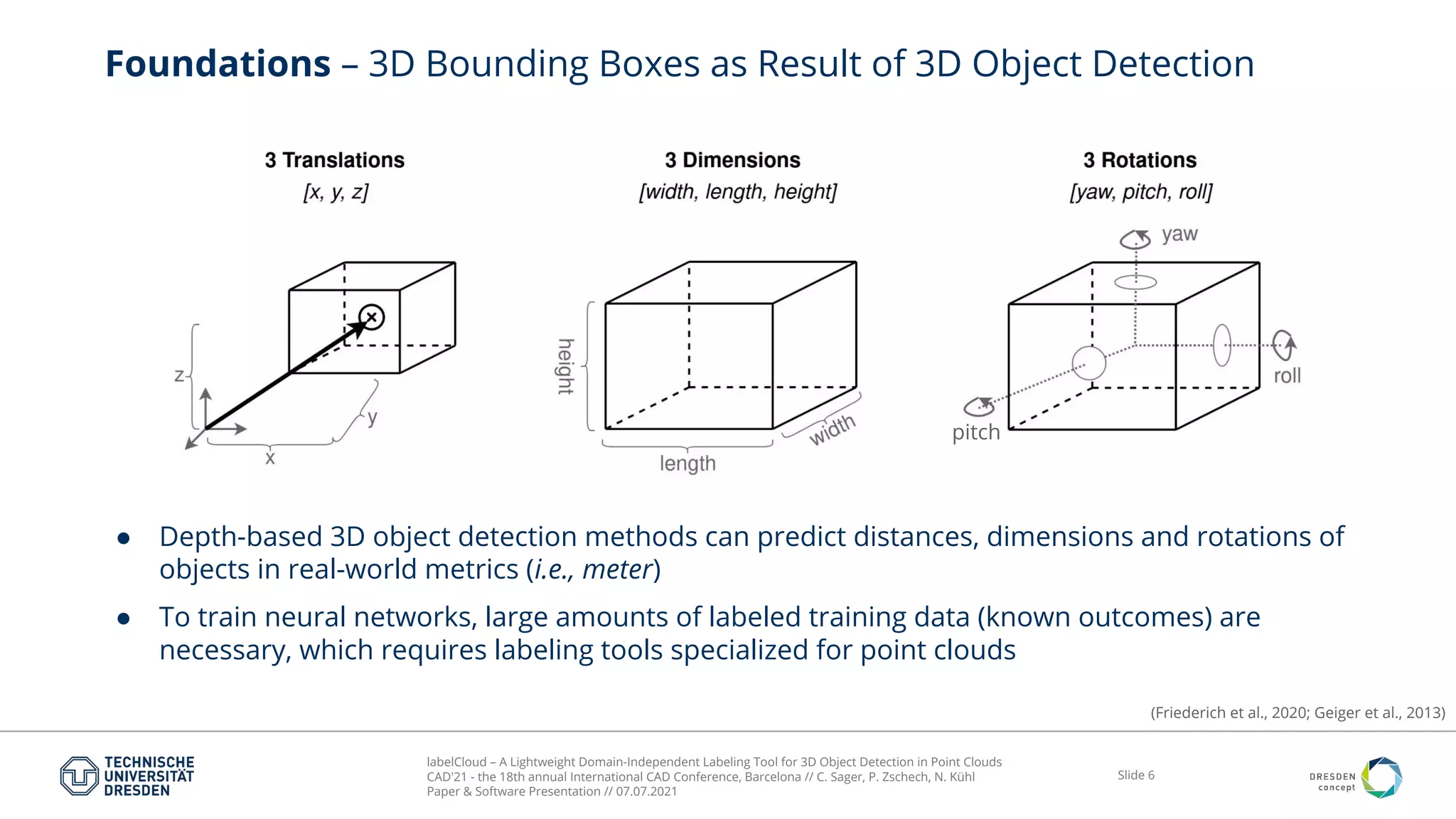
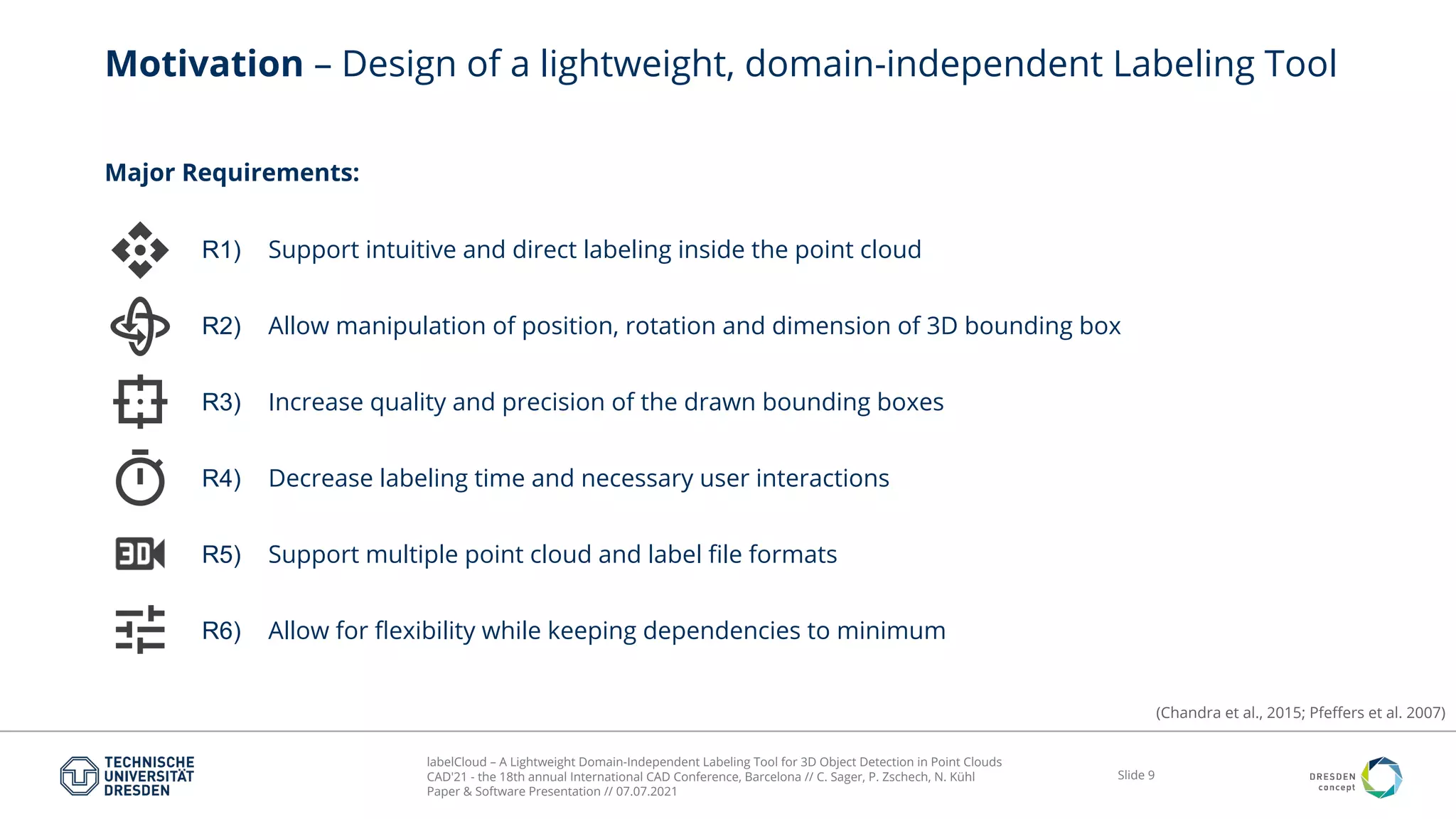
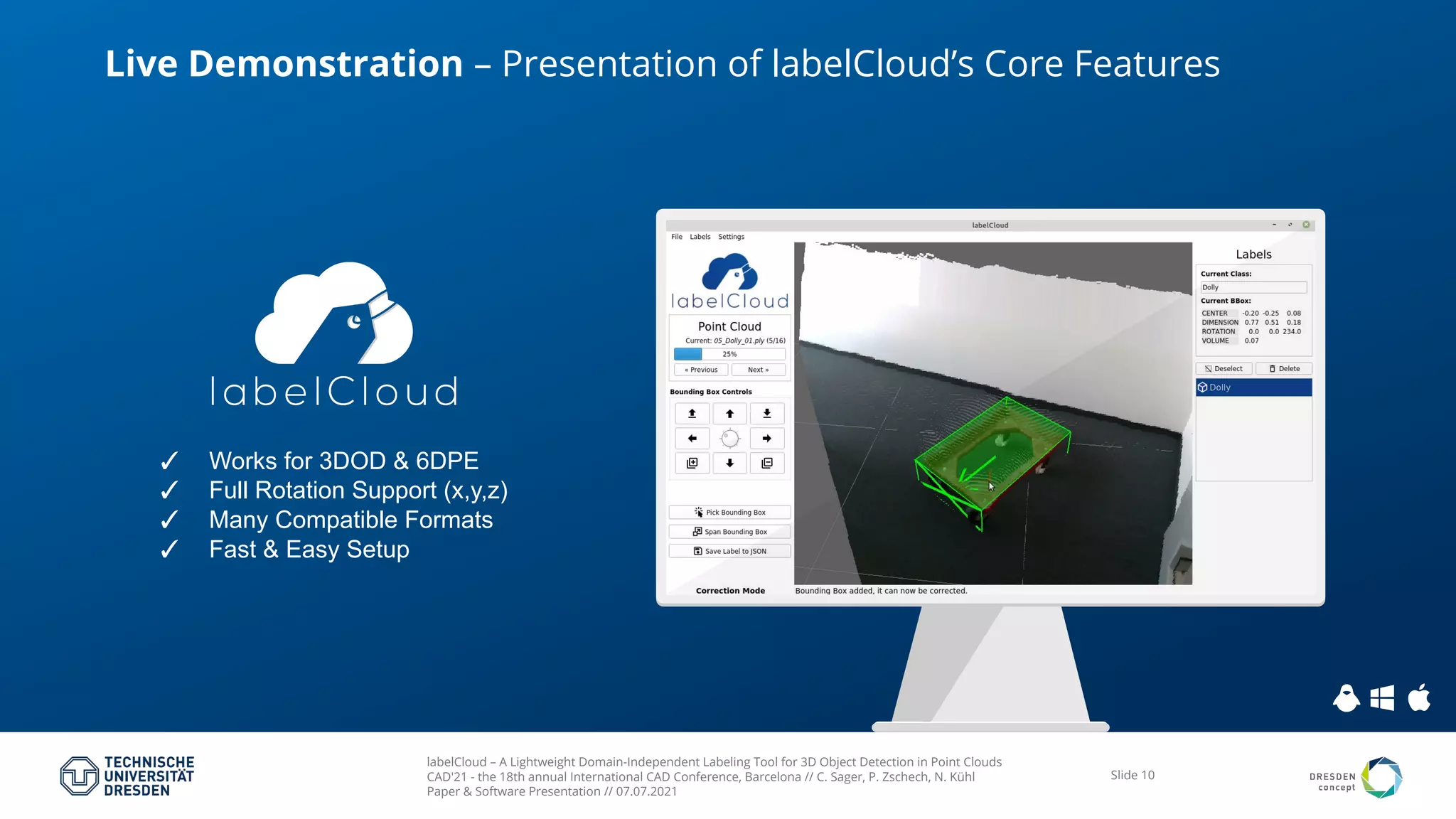
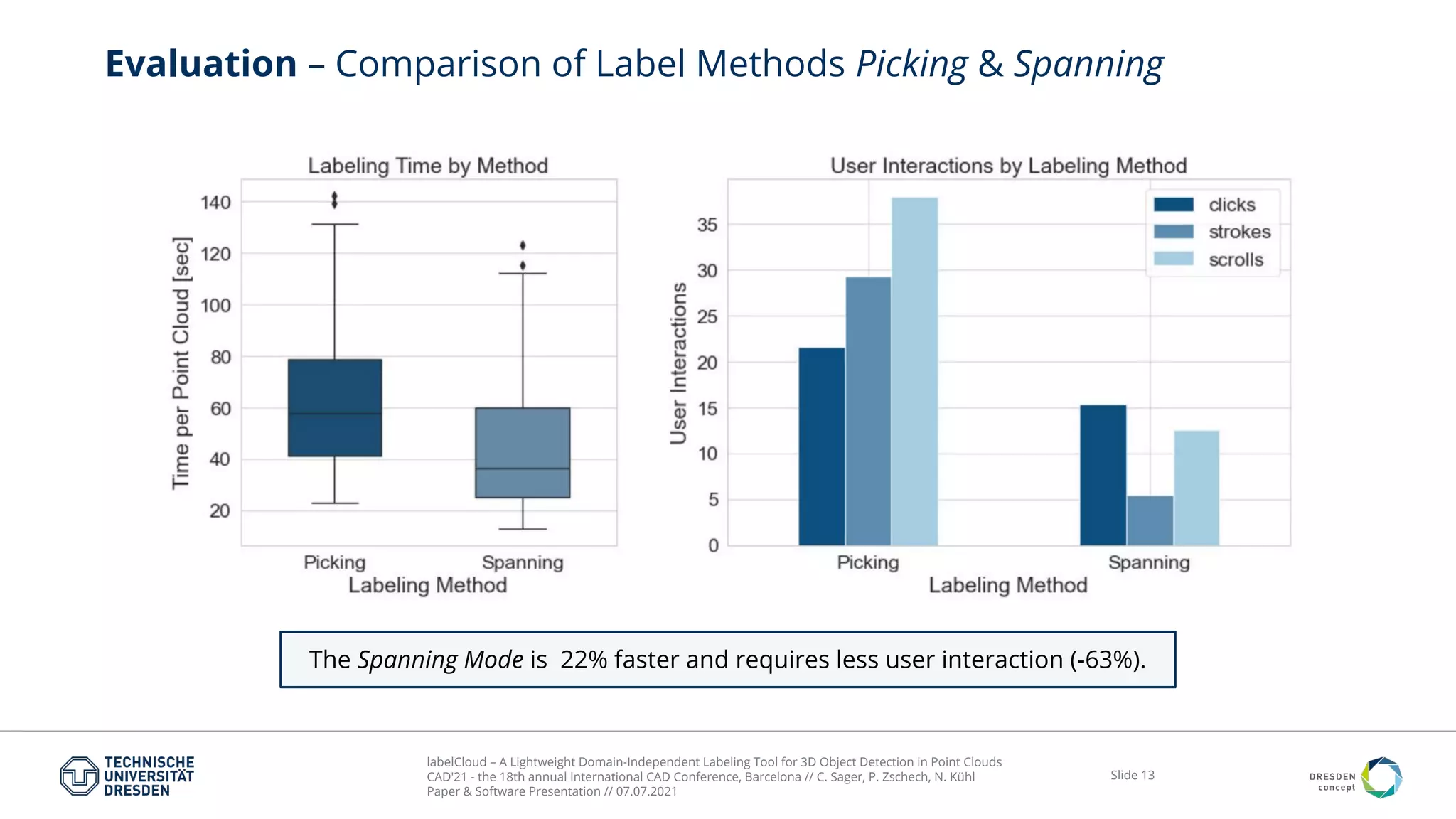
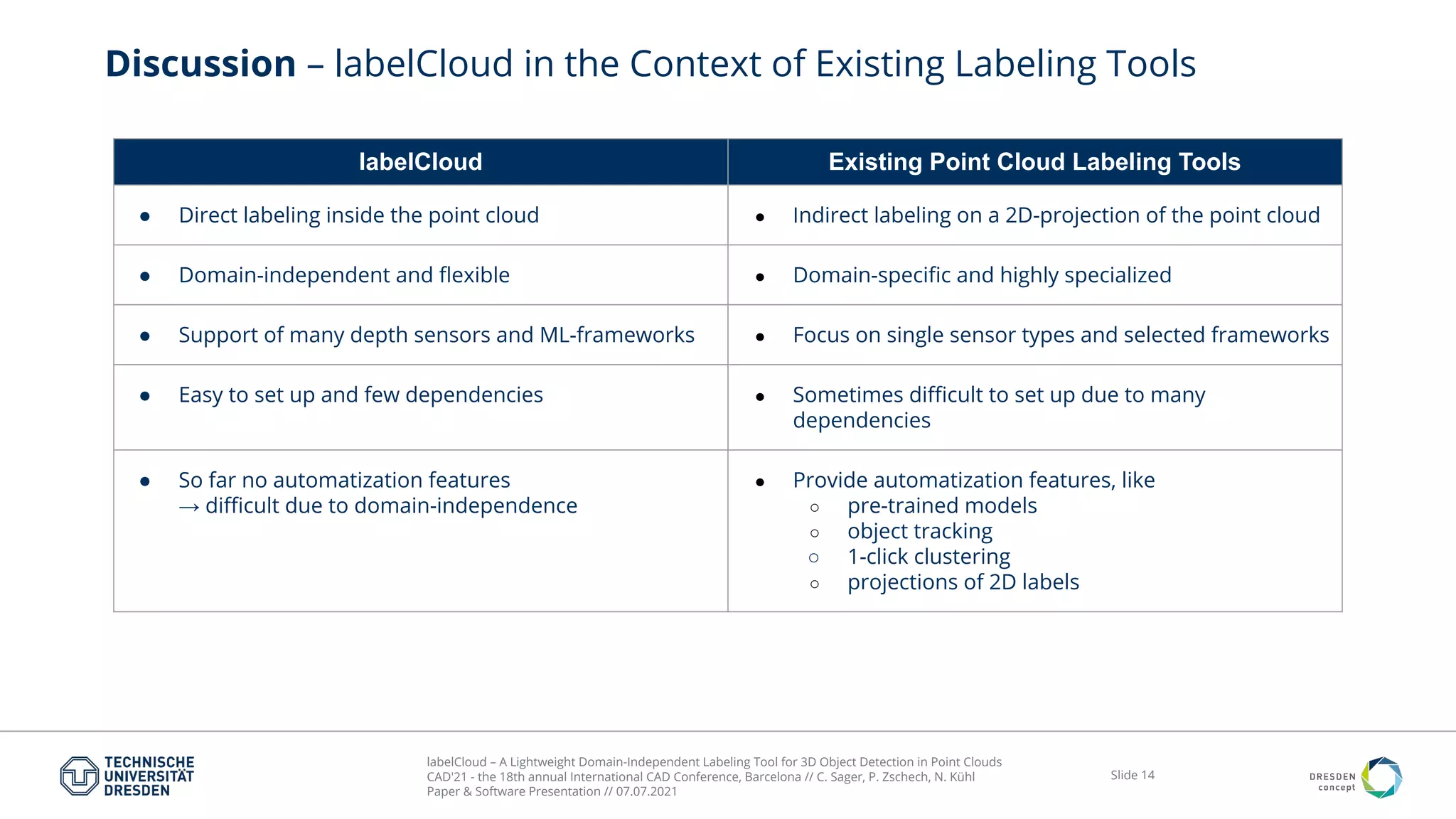
The document presents 'LabelCloud,' a lightweight, domain-independent labeling tool designed for 3D object detection in point clouds, aimed at improving safety-critical applications like autonomous driving and robotics. It addresses the limitations of existing labeling tools by providing features such as direct labeling, support for various file formats, and faster labeling through efficient user interaction. The evaluation highlights LabelCloud's effectiveness, noting significant improvements in labeling speed and precision compared to existing tools.