Download as PDF, PPTX

![2019/2/22最近よく聞く Kubernetes を体験してみた 27/30
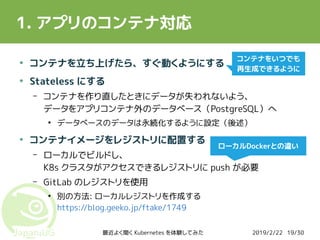
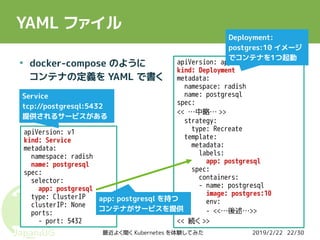
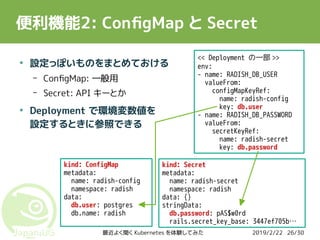
アプリを動かす
●
同じように
Deployment と
Service を書く
●
$ kubectl apply
apiVersion: apps/v1
kind: Deployment
metadata:
namespace: radish
name: radish
spec:
selector:
matchLabels:
app: radish
template:
metadata:
labels:
app: radish
spec:
containers:
- name: radish-server
image: registry.gitlab.com/ftake/radish:master
imagePullPolicy: Always
command: ["bundle", "exec", "rails", "s"]
env:
<< 長いので省略 >>
ports:
- containerPort: 3000
apiVersion: v1
kind: Service
metadata:
namespace: radish
name: radish
spec:
selector:
app: radish
type: NodePort
ports:
- port: 3000
nodePort: 30080](https://image.slidesharecdn.com/20190222-osc-tokyo-k8s-190224122636/85/Kubernetes-27-320.jpg)

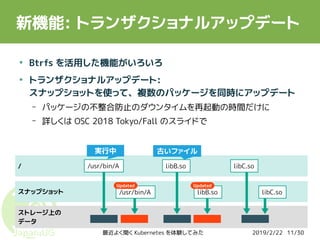
Kubernetes は多数のコンテナからなるシステムを行うためのシステムで、コンテナオーケストレーションシステムと 呼ばれるものの1つです。最初に開発した Google に加え、多数の企業からなるコミュニティによって開発されており、 近年注目されています。 本セミナーでは日本 openSUSE ユーザ会のメンバーが Kubernetes を使ってみた経験を紹介します。 前半の Kubernetes 構築編では、Kubernetes クラスタをローカル環境に構築する方法を説明します。 Google Cloud プラットフォームなどでは、サービスとして Kubernetes が提供されており、すぐに利用できますが、 本セミナーでは、ローカル環境で使用する方法を主に扱います。 前半の構築編では、openSUSE Tumbleweed ベースのディストリビューション openSUSE Kubic と kubeadm で、 すぐに・簡単に Kubernetes クラスタ(master, worker ノード)をセットアップする方法を説明します。続けて、 dashboad をインストールし、Web ブラウザで実行中のコンテナを管理する方法を紹介します。 後半の活用編は、自作の Web アプリケーションを Kubernetes クラスタにデプロイしてみた体験談です。 基本的な考え方と、Docker や docker-compose で実行する場合との違いについて説明します。 ※本セミナーでは Kubernetes の専門的な技術情報は提供できませんのでご了承下さい
































![[GKE & Spanner 勉強会] GKE 入門](https://cdn.slidesharecdn.com/ss_thumbnails/gke01-200121090059-thumbnail.jpg?width=640&height=640&fit=bounds)







![Kubernetes on Mesos Deep Dive [Japanese]](https://cdn.slidesharecdn.com/ss_thumbnails/k8sonmesos-180626063613-thumbnail.jpg?width=640&height=640&fit=bounds)


























