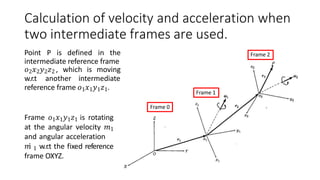
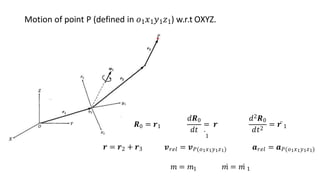
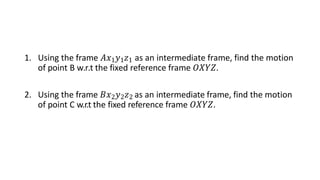
The document discusses the calculation of velocity and acceleration using two intermediate reference frames and provides case studies involving angular motions and corresponding transformations. It explores the dynamics of a bird on a rotating mobile structure and a robot manipulating a workpiece, detailing the velocities and accelerations involved at various points. The analysis is framed in terms of intermediate reference frames, detailing the motion relative to fixed and intermediate frames.