The document discusses the challenges and processes involved in embedded software development, including limitations related to memory, computational power, and energy consumption. It outlines the compilation and linking processes specific to embedded systems, the use of various programming languages suitable for embedding, and the steps necessary for a microcontroller to start running code. Additionally, it introduces tools and environments relevant to working on embedded software projects.




![23
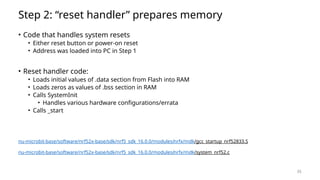
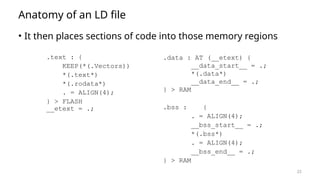
Sections of code
• Where do these sections come from?
• Most are generated by the compiler
• .text, .rodata, .data, .bss
• You need to be deep in the docs to figure out how the esoteric ones
work
• Some are generated by the programmer
• Allows you to place certain data items in a specific way
__attribute__((section(".foo")))
int test[10] = {0,0,0,0,0,0,0,0,0,0};](https://image.slidesharecdn.com/lecture03embeddedsoftware-250127032846-bbaea465/85/lecture03_EmbeddedSoftware-for-Beginners-23-320.jpg)