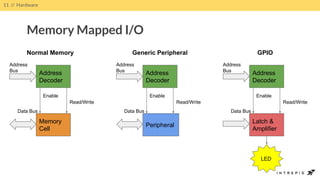
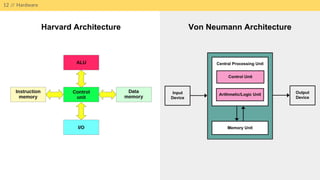
The document provides an overview of embedded systems and firmware, highlighting their dedicated purpose as part of larger electronic devices. It contrasts embedded systems with general-purpose devices, emphasizing differences in programming languages, hardware access, and constraints. The text also discusses hardware interfacing, architecture, programming techniques, and debugging tools relevant to embedded systems.