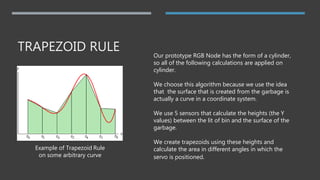
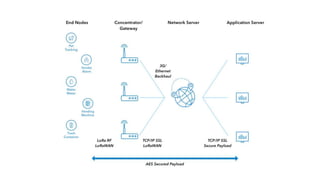
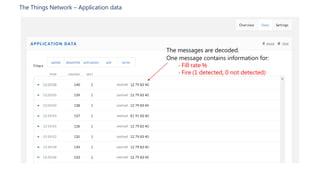
This document describes a project using LoRaWAN to create a garbage network that monitors trash bins. Sensors in trash bins measure fill level, fire detection, and bin opening. The data is sent via LoRaWAN nodes to an application. Algorithms use ultrasonic sensors and a servo motor to calculate bin volume via a trapezoid method. The network provides long-range communication for monitoring multiple bins to improve waste management. A prototype was created and tested to demonstrate the concept.





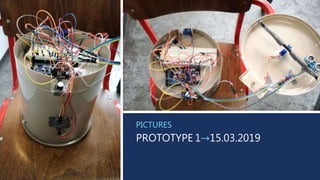
![ Three actions activate the opening lid:
1. RFID [only on prototype]
2. Opening caused by fire detection
3. Pressure plate
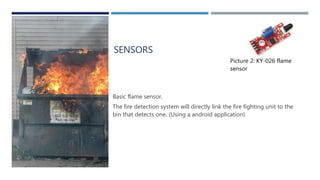
Picture 1: Prototype
OPENING MOTORS](https://image.slidesharecdn.com/garbagemanagementnetwork-190509230232/85/IoT-Garbage-management-network-using-LoRaWAN-9-320.jpg)


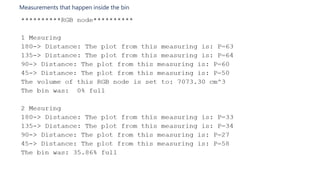
![Riemann Garbage Bin (RGB)
Georg Bernhard Riemann [1826-1866]](https://image.slidesharecdn.com/garbagemanagementnetwork-190509230232/85/IoT-Garbage-management-network-using-LoRaWAN-16-320.jpg)





![Prototype 2[Video]: 25.03.2019](https://image.slidesharecdn.com/garbagemanagementnetwork-190509230232/85/IoT-Garbage-management-network-using-LoRaWAN-33-320.jpg)
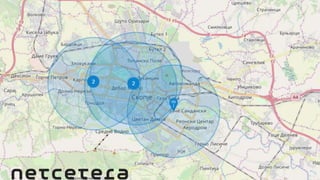
![REUSABILITY
PROJECT DEPLOYED IN DENMARK [2018]
Picture: How sensor boxes are placed on existing bins on a student campus](https://image.slidesharecdn.com/garbagemanagementnetwork-190509230232/85/IoT-Garbage-management-network-using-LoRaWAN-37-320.jpg)






































![LoRa Flue smoke gas monitoring network [2019 - cassini.ginesi.leaschiera]](https://cdn.slidesharecdn.com/ss_thumbnails/lorafluesmokegasmonitoringnetwork-2019-cassini-191016122709-thumbnail.jpg?width=640&height=640&fit=bounds)







