Downloaded 22 times



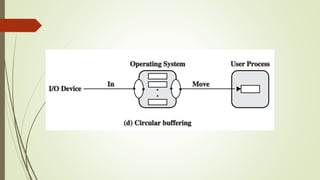


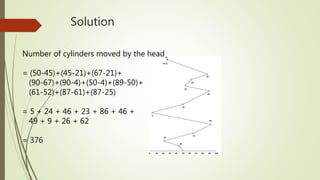

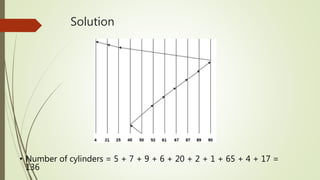


The document discusses different buffering techniques and disk scheduling algorithms used in operating systems. It describes single buffering, double buffering, and circular buffering techniques. For disk scheduling, it explains first-come, first-served (FCFS), shortest seek time first (SSTF), SCAN, C-SCAN, LOOK, and C-LOOK algorithms. It provides examples to calculate head movements using FCFS and SSTF scheduling.