

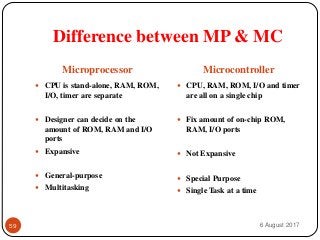
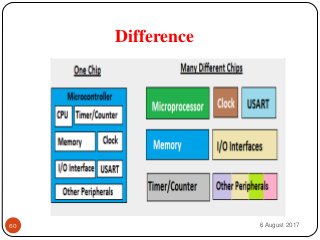


The document provides an introduction to microprocessors and microcontrollers, outlining their architecture, applications, and key differences. It details various Intel microprocessors developed over the years, emphasizing their features, registers, and instruction sets. The text also highlights the distinction between microprocessors and microcontrollers in terms of functionality and integration.