The document discusses different techniques for line clipping, including:
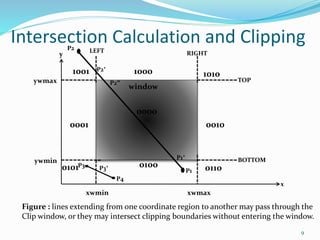
1. The Cohen-Sutherland line clipping algorithm which divides the screen into 9 regions and clips lines based on which regions their endpoints fall into.
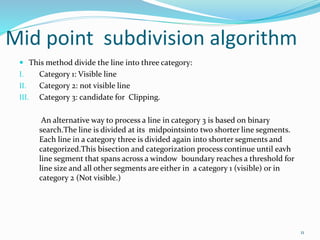
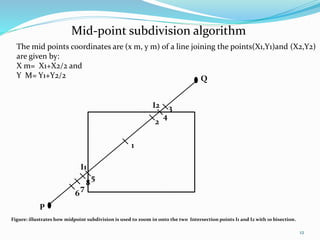
2. Midpoint subdivision is an alternative that recursively divides lines at the midpoint until they can be fully classified.
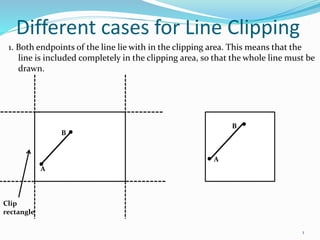
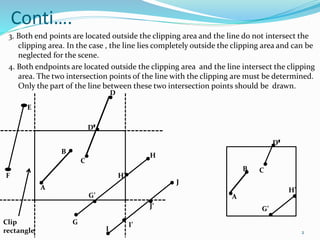
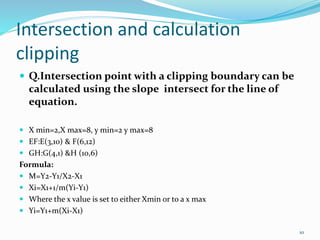
3. Intersection calculations determine where lines intersect clipping boundaries.
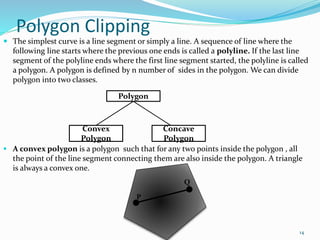
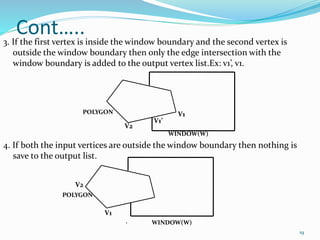
Polygon clipping extends these ideas, testing vertex pairs and either outputting intersections or vertices as needed to clip the polygon shape.