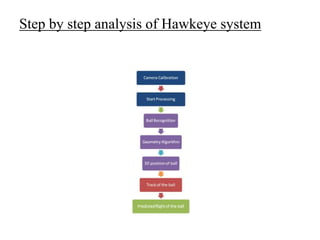
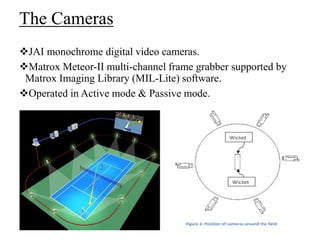
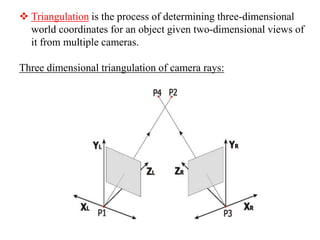
Hawkeye technology uses multiple cameras to visually track and triangulate the position of a ball in 3D space. It was developed in 2001 by Dr. Paul Hawkins to aid in line call and dismissal decisions in sports like tennis and cricket. The system calibrates camera parameters and uses image processing to identify the ball in each frame before applying triangulation algorithms to determine the ball's trajectory over time. Hawkeye provides 3D spatial data that can generate visualizations and statistics to analyze shots, player performance, and review difficult on-field decisions. It has become an integral part of many professional sporting events.