Download to read offline
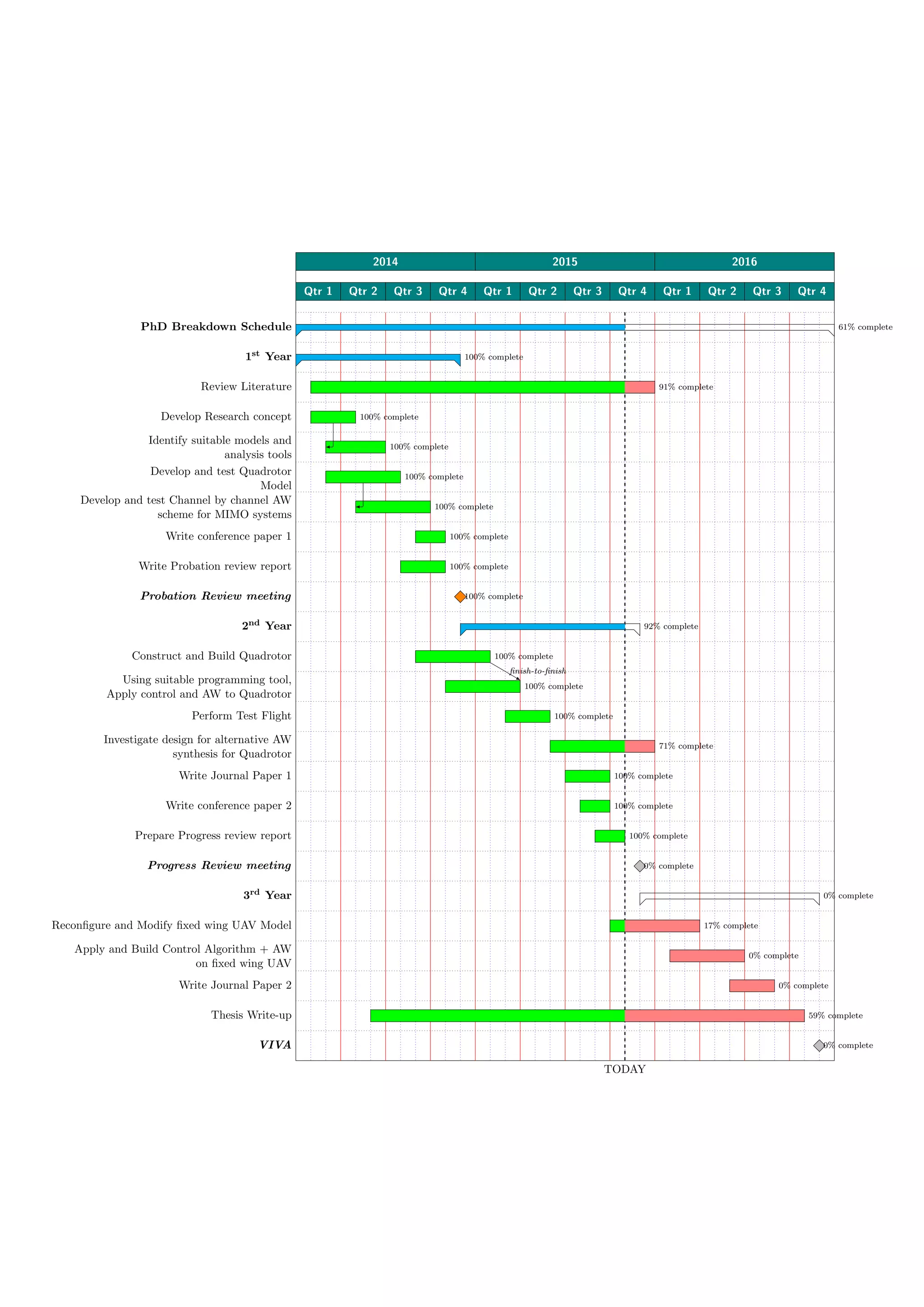

This document outlines the schedule and progress of a PhD program from 2014 to 2016. It shows the completion percentage of various tasks over four quarters each year, including reviewing literature, developing research concepts, building and testing quadrotor and fixed wing drone models, writing papers and reports, and completing a thesis write-up and viva defense. The student has completed most first year tasks and is making progress on second and third year work, with the goal of finishing the PhD program by the end of 2016.