Downloaded 46 times



























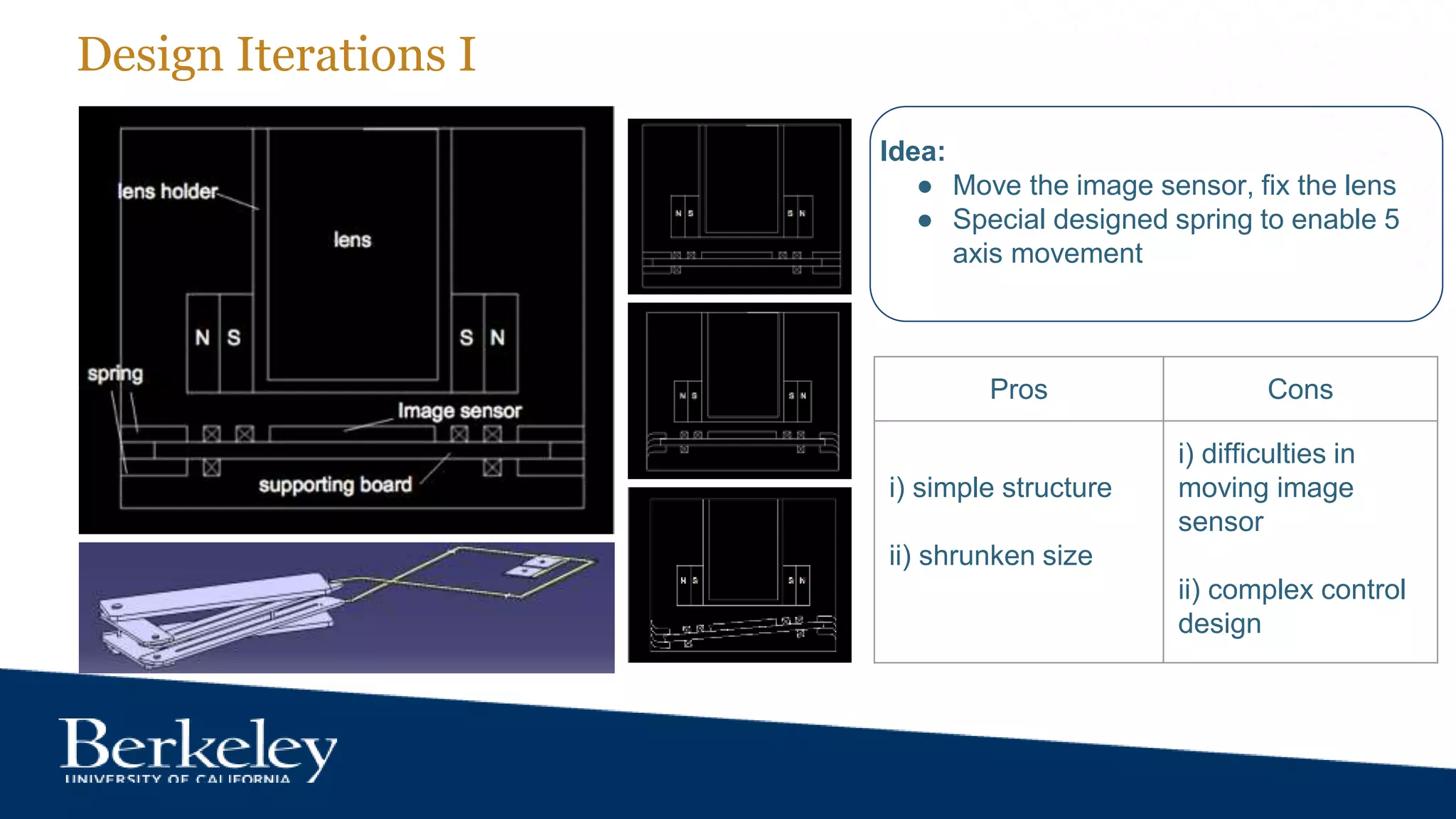



The UC Berkeley Capstone Project aims to design a 5-axis optical image stabilizer for cellphone cameras. The team is designing the overall structure, voice coil motors using magnets and coils, and spring plates. They have considered different actuator options and selected voice coil motors based on their performance in smartphones. Through testing various magnet-coil placements and spring designs, the team developed a final design and working prototype that can compensate for hand shaking in 5 degrees of freedom using an Arduino, gyro sensor, and servo control.



























