Download as PDF, PPTX
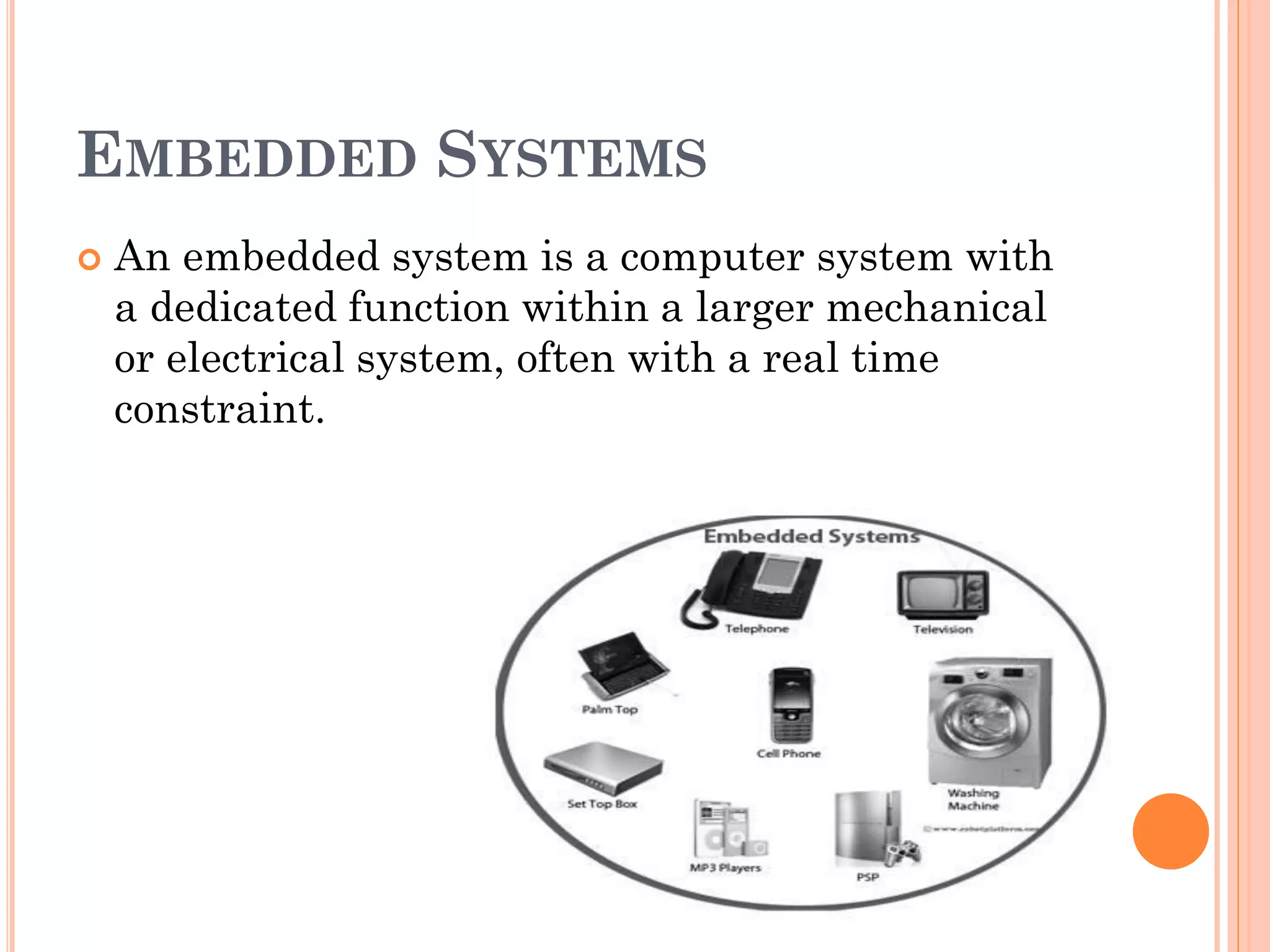
![SCHEDULING ALGORITHM
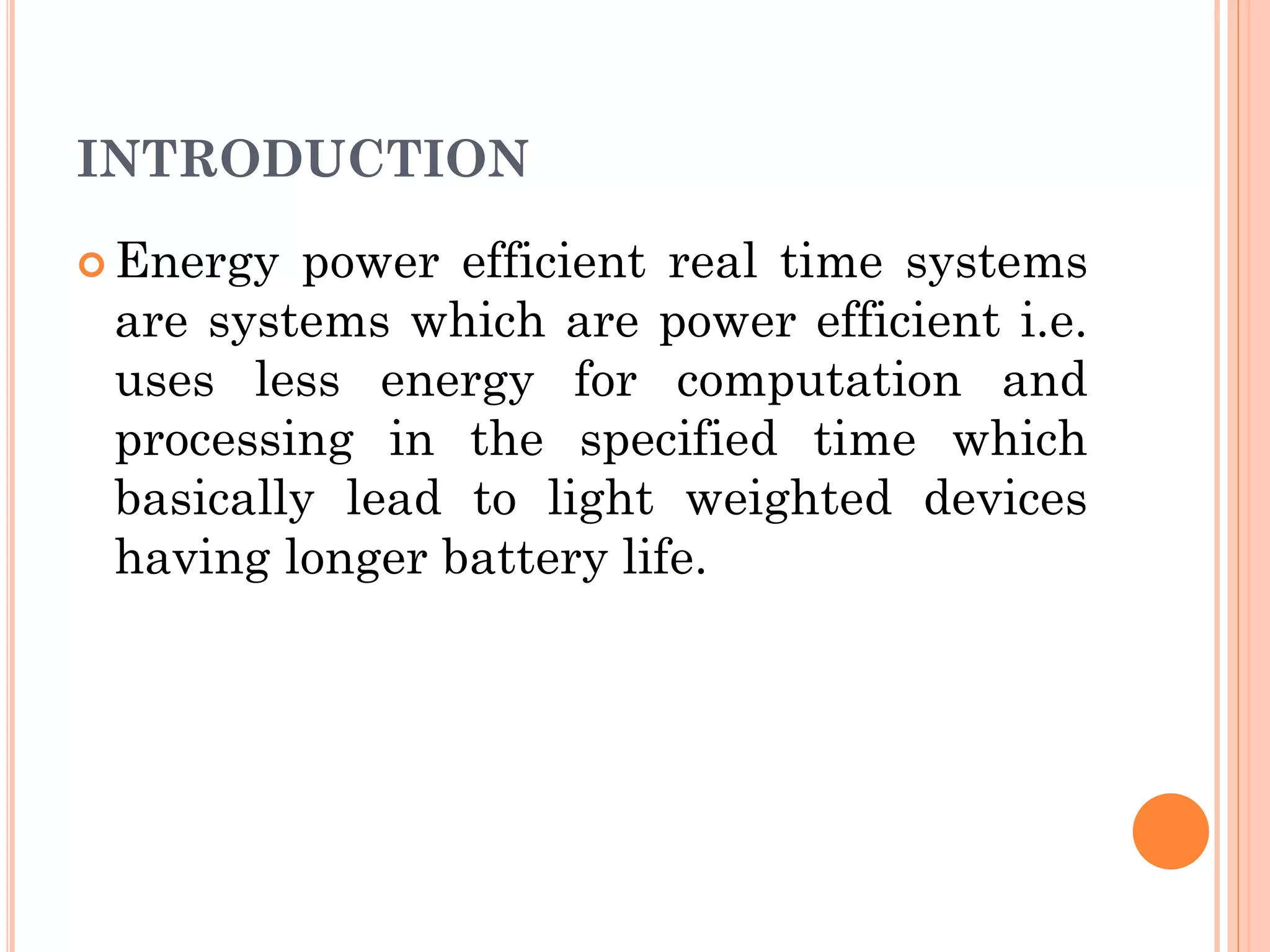
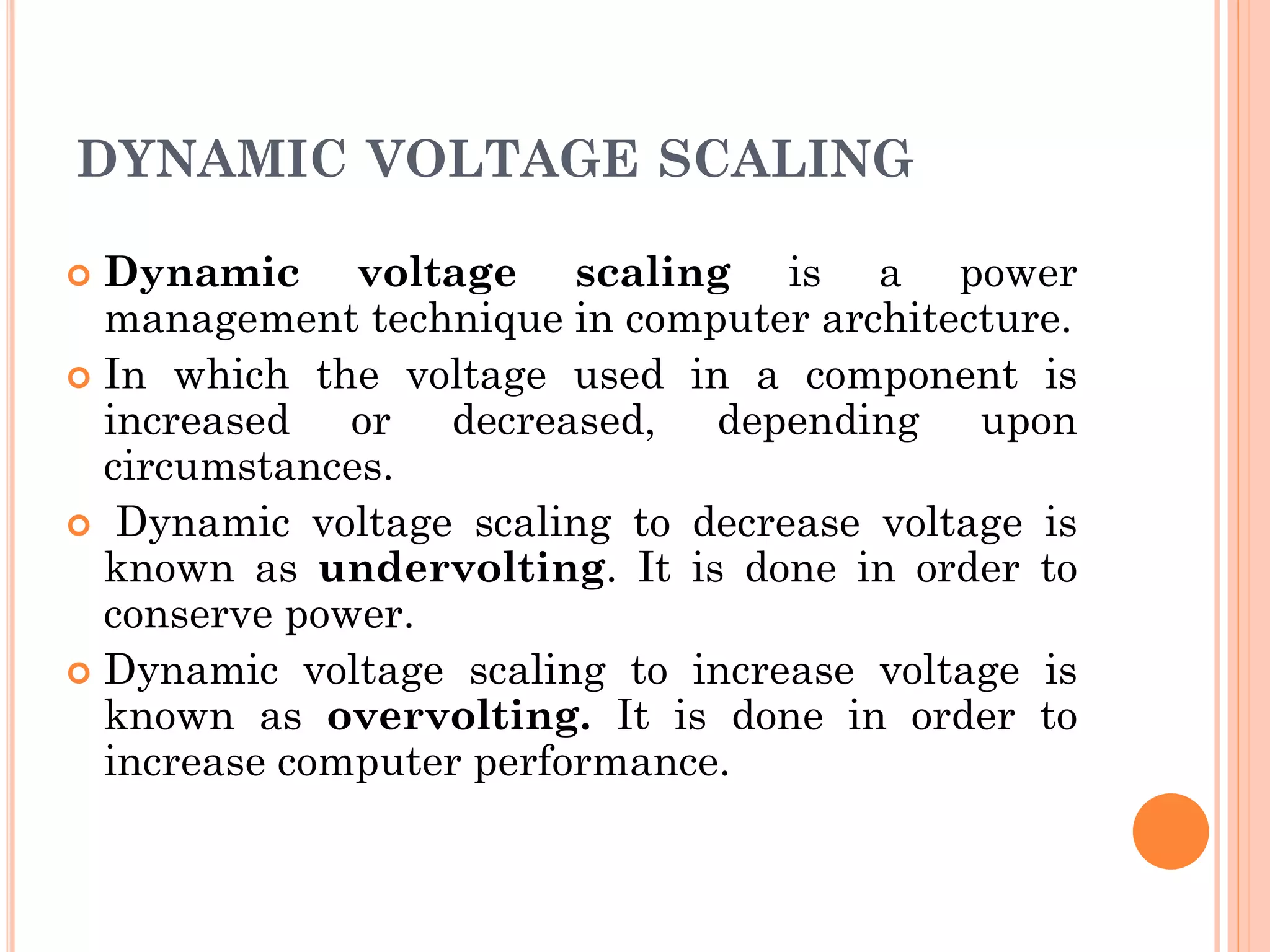
1: Input: The current job Ji and the current
time t(cur);
2: if Ji is the only job in the ready queue then
3:Let edi = min{di, tLS};
//tLS is computed with 1
4: Compute Ii(eb) based on Ji’s current feasible
interval [t(cur),edi];
5: let fi be the expected completion time of Ji under
S(crit) ;
6: if (edi − fi) ≥ Ii(eb) then](https://image.slidesharecdn.com/presentation14-141001080703-phpapp01/75/Energy-power-efficient-real-time-systems-17-2048.jpg)
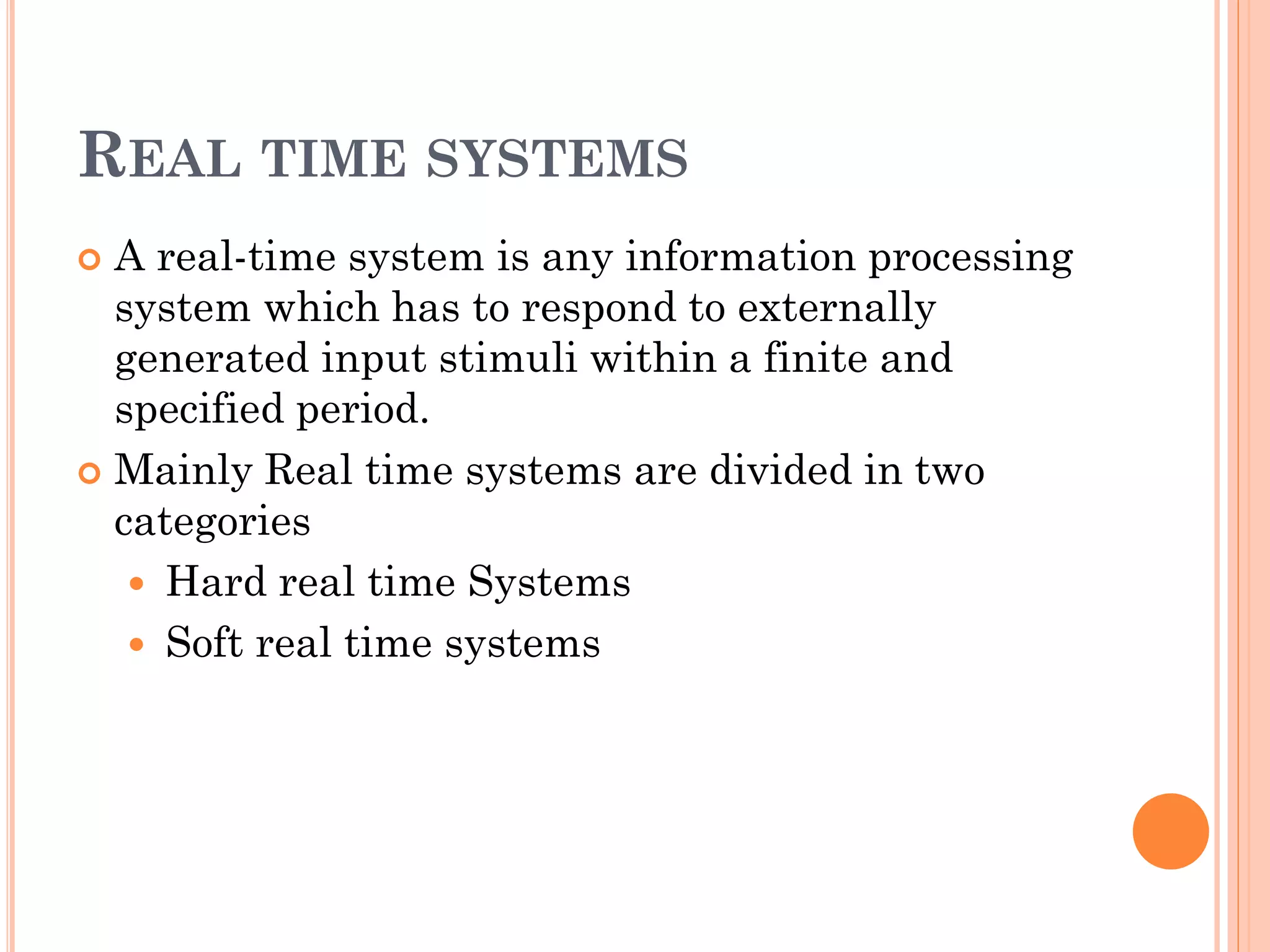
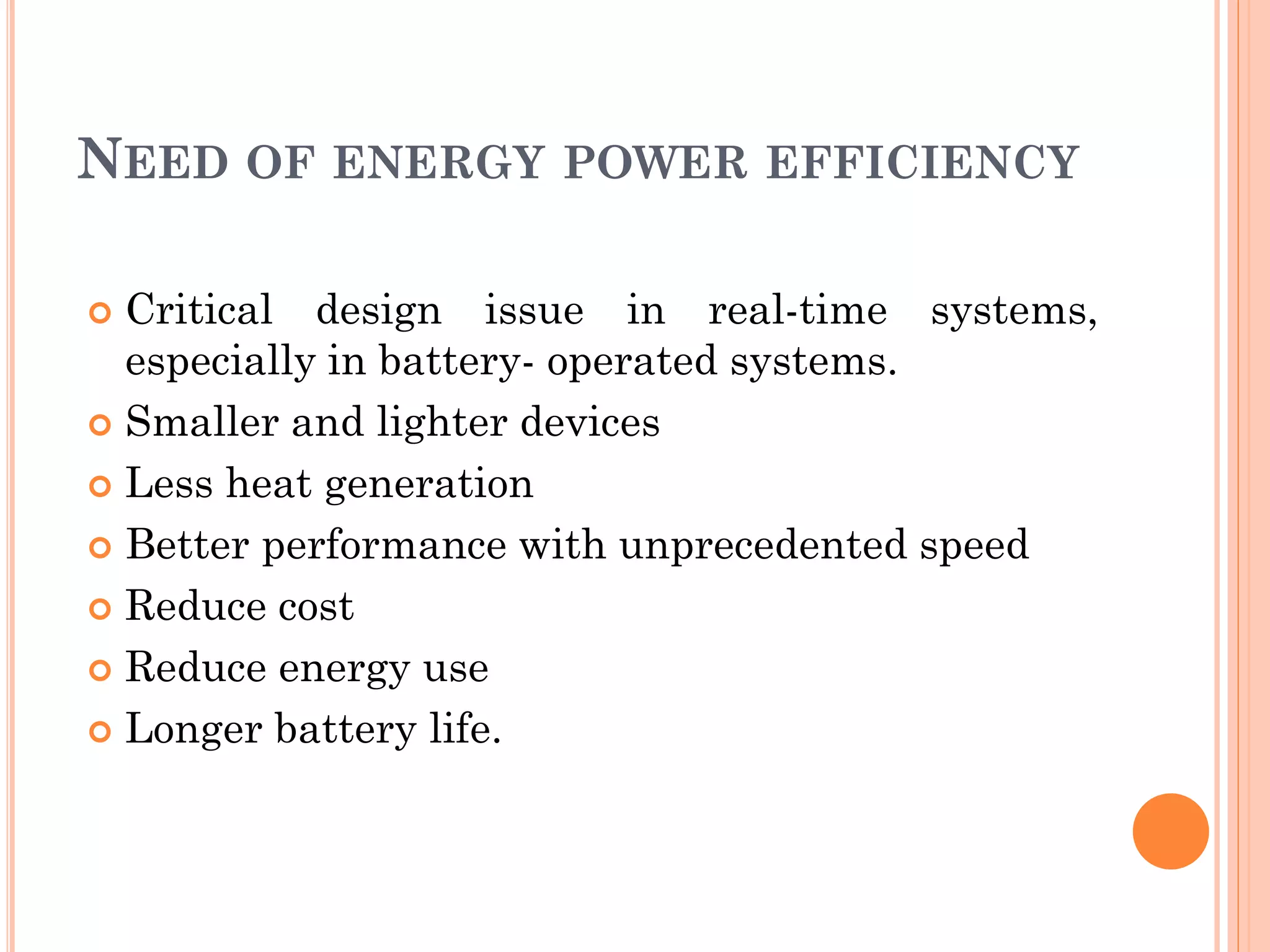
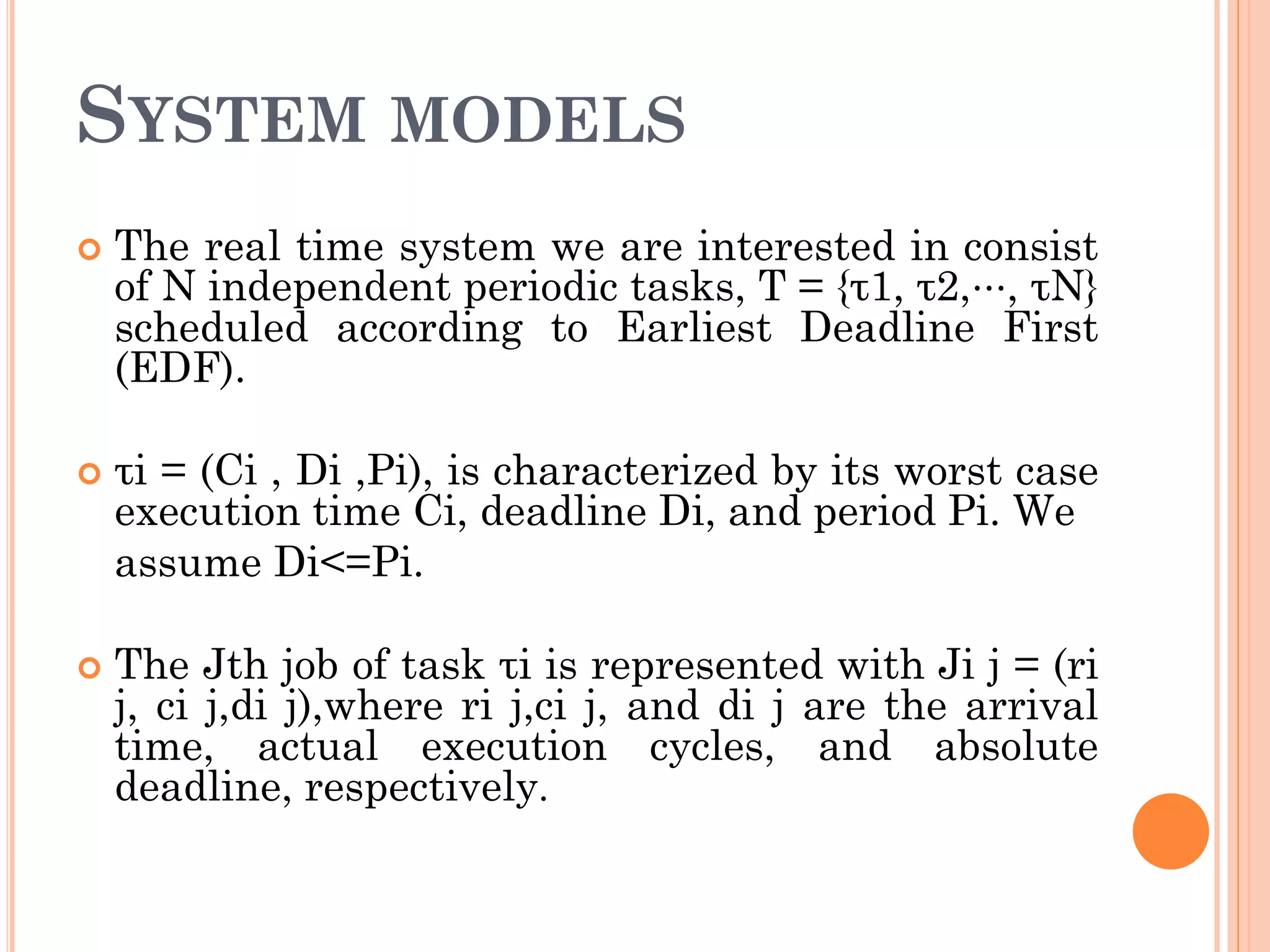
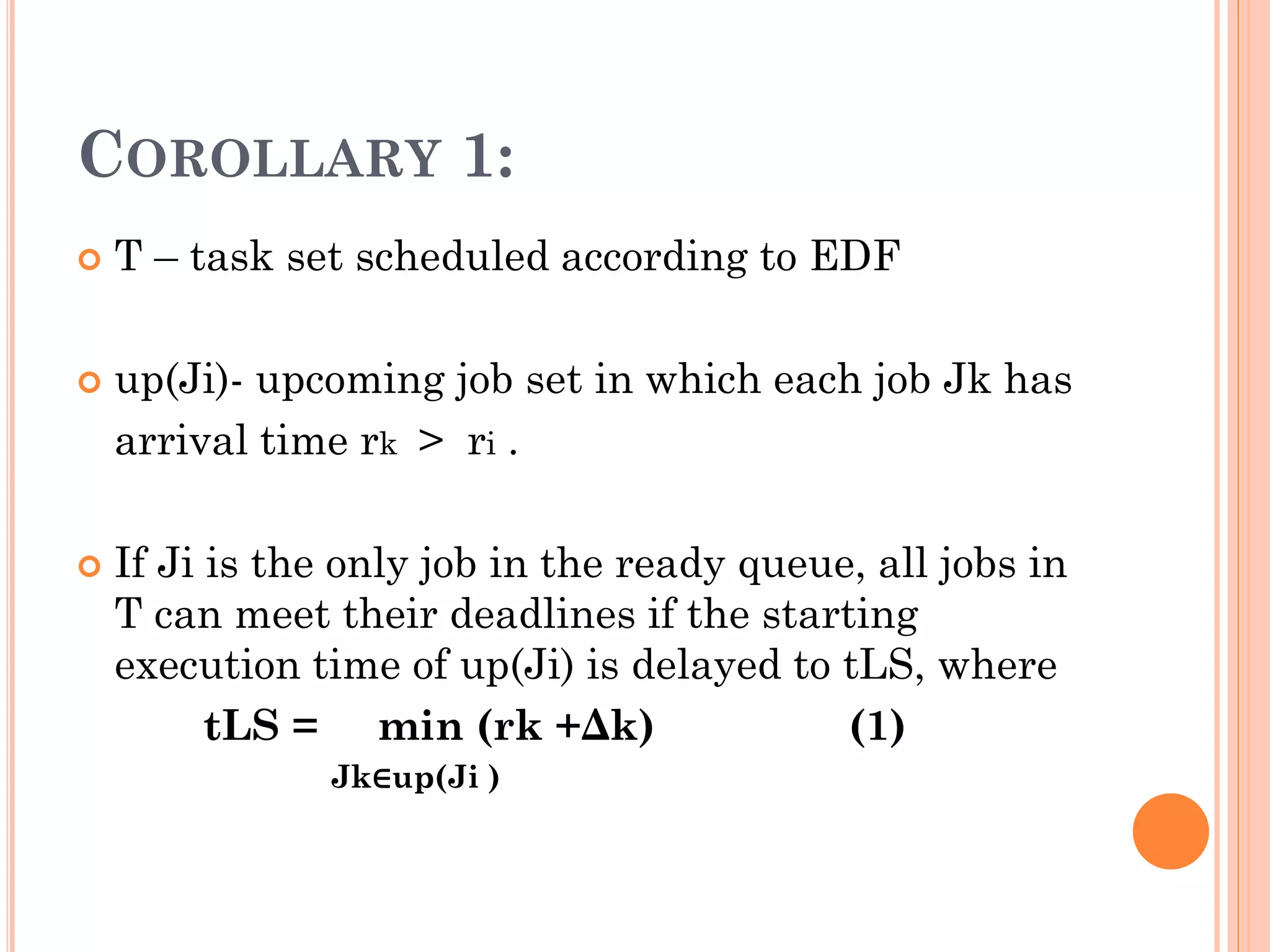
![13: else
14: Execute Ji with s′i = (ci×si)/(edi−(tcur)) non-preemptively
within [t(cur),edi]; // DVS strategy
stretching to edi;
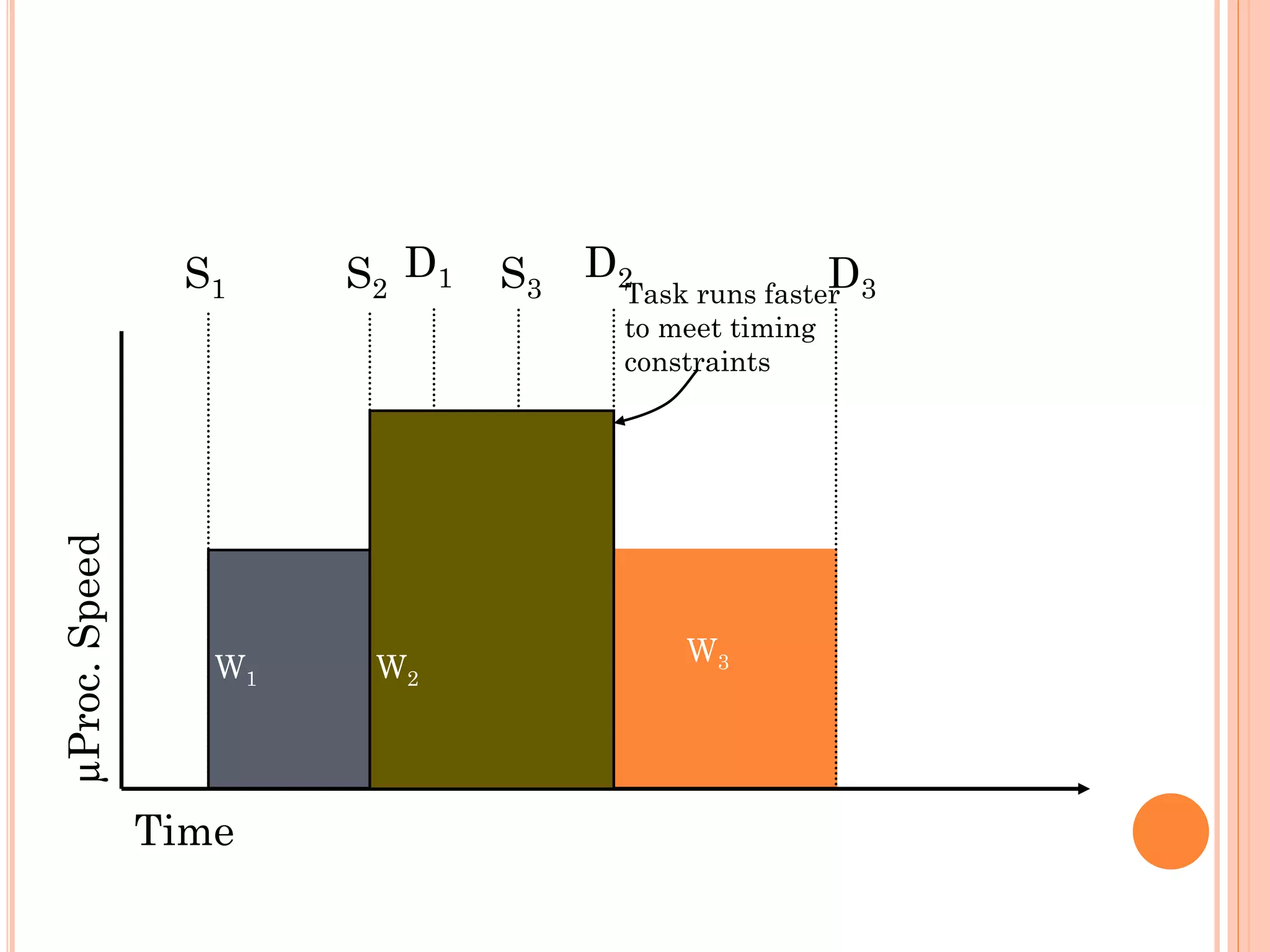
Start Deadline Start Deadline
μProc.Speed Time
Idle time
represent
s wasted
energy
Lower speed,
Lower voltage,
Lower energy
Energy ~ Work • Speed
Work
Work](https://image.slidesharecdn.com/presentation14-141001080703-phpapp01/75/Energy-power-efficient-real-time-systems-19-2048.jpg)
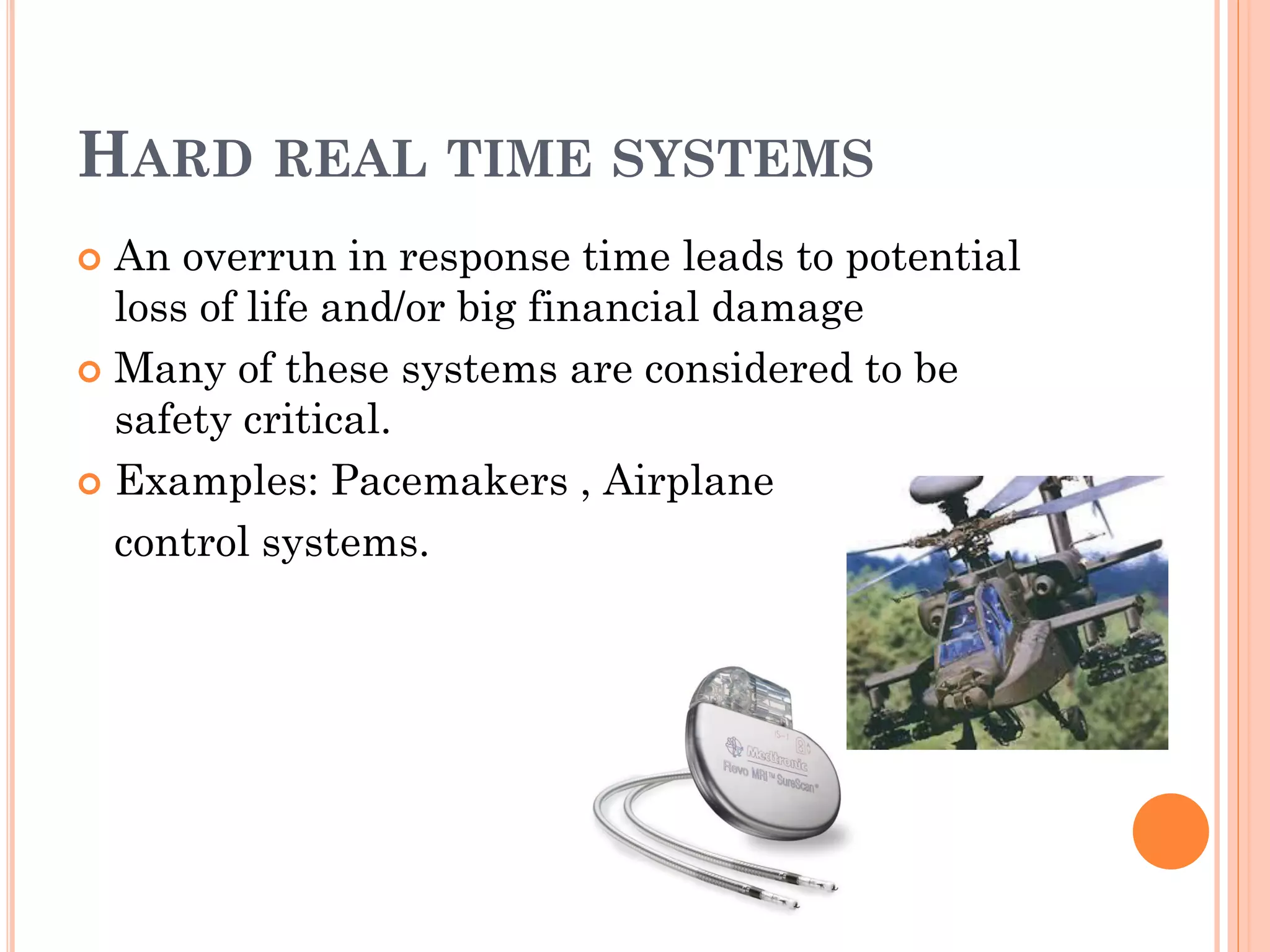
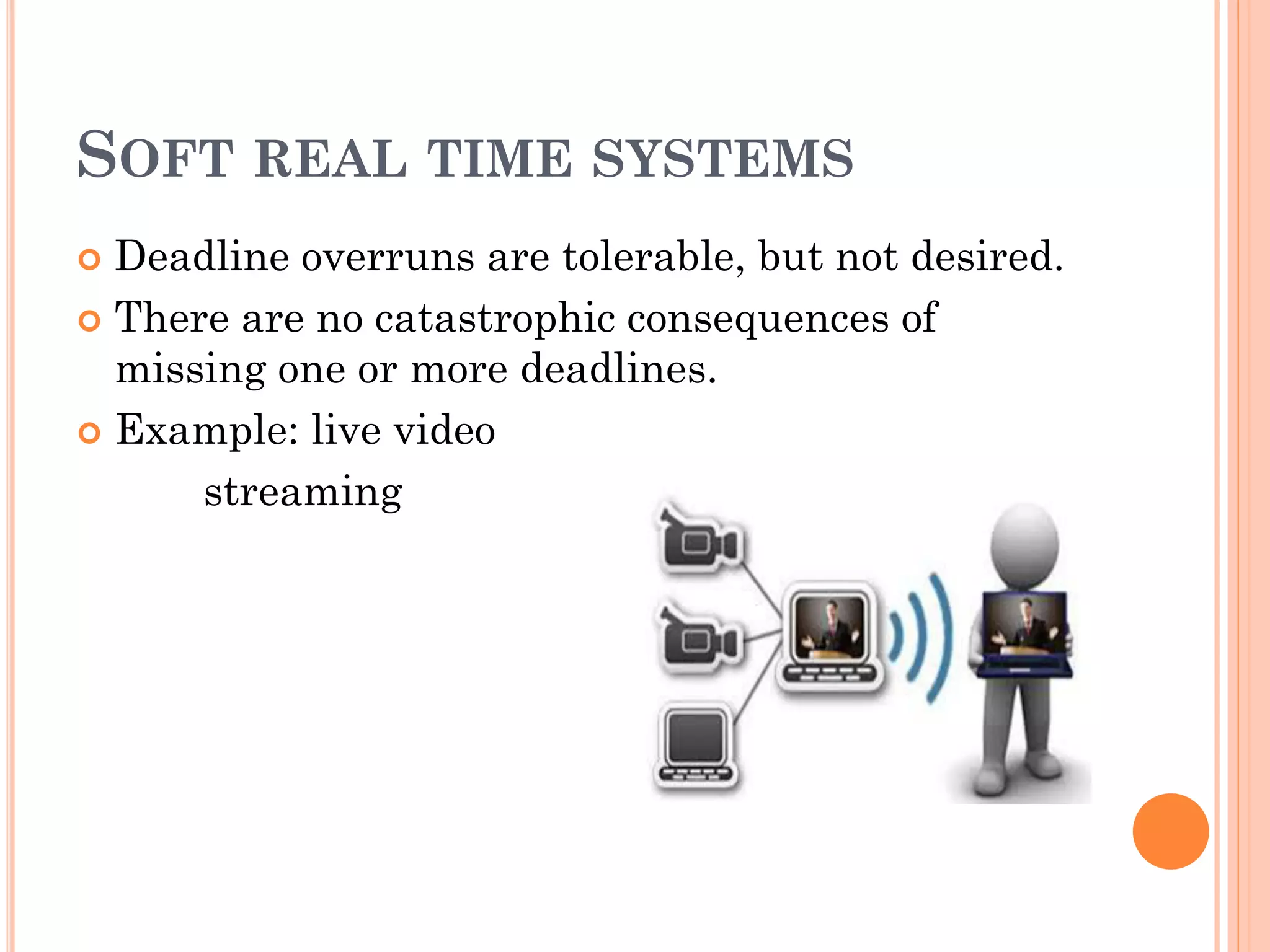
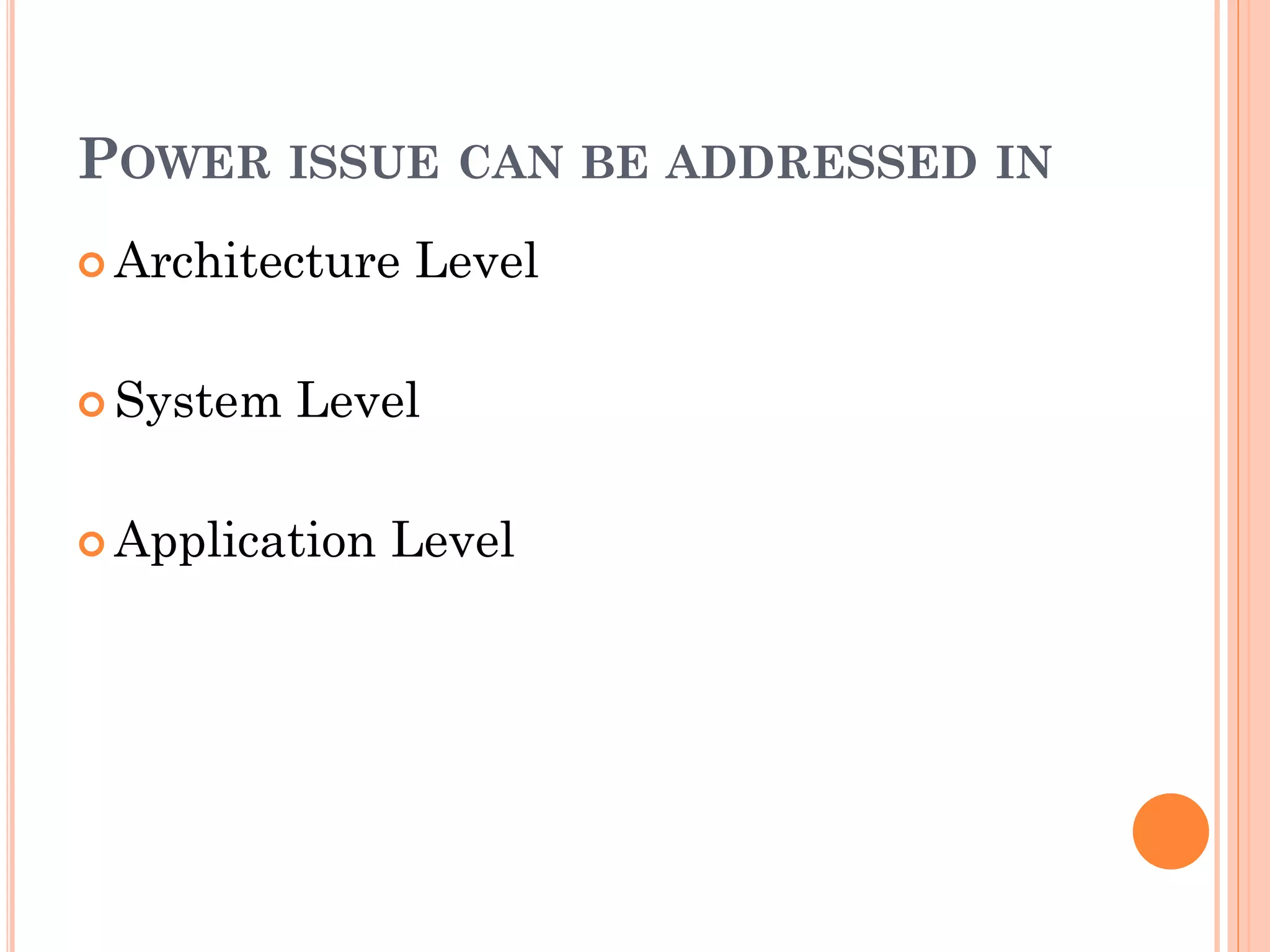
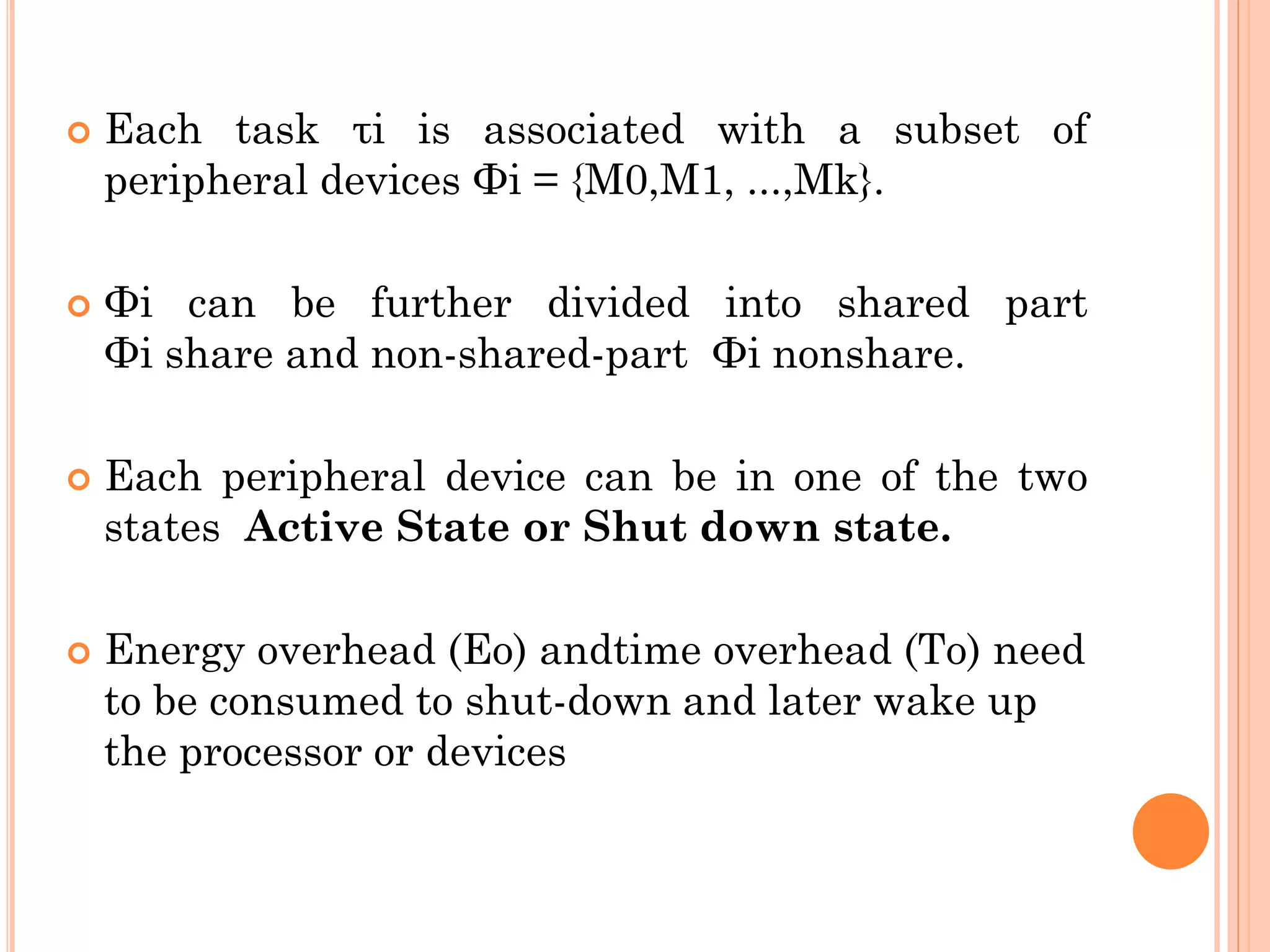
![CONT..
15: end if
16: end if
17: else
18: Compute ˜tLS based on equation (2);
19: Execute Ji with max{si, S(crit)} non-preemptively
within [t(cur),˜tLS] and shut down
its non-shared devices Φi nonshare upon its
completion;
20: end if](https://image.slidesharecdn.com/presentation14-141001080703-phpapp01/75/Energy-power-efficient-real-time-systems-20-2048.jpg)



This document discusses energy efficient real-time systems. It introduces real-time systems and divides them into hard and soft categories. Hard real-time systems have consequences for missing deadlines while soft systems do not. The document then discusses embedded systems and the need for energy efficiency in real-time systems. It presents scheduling and dynamic voltage scaling techniques to improve energy efficiency. Finally, it proposes a dynamic scheduling algorithm to minimize energy consumption using an energy beneficial break even time approach.