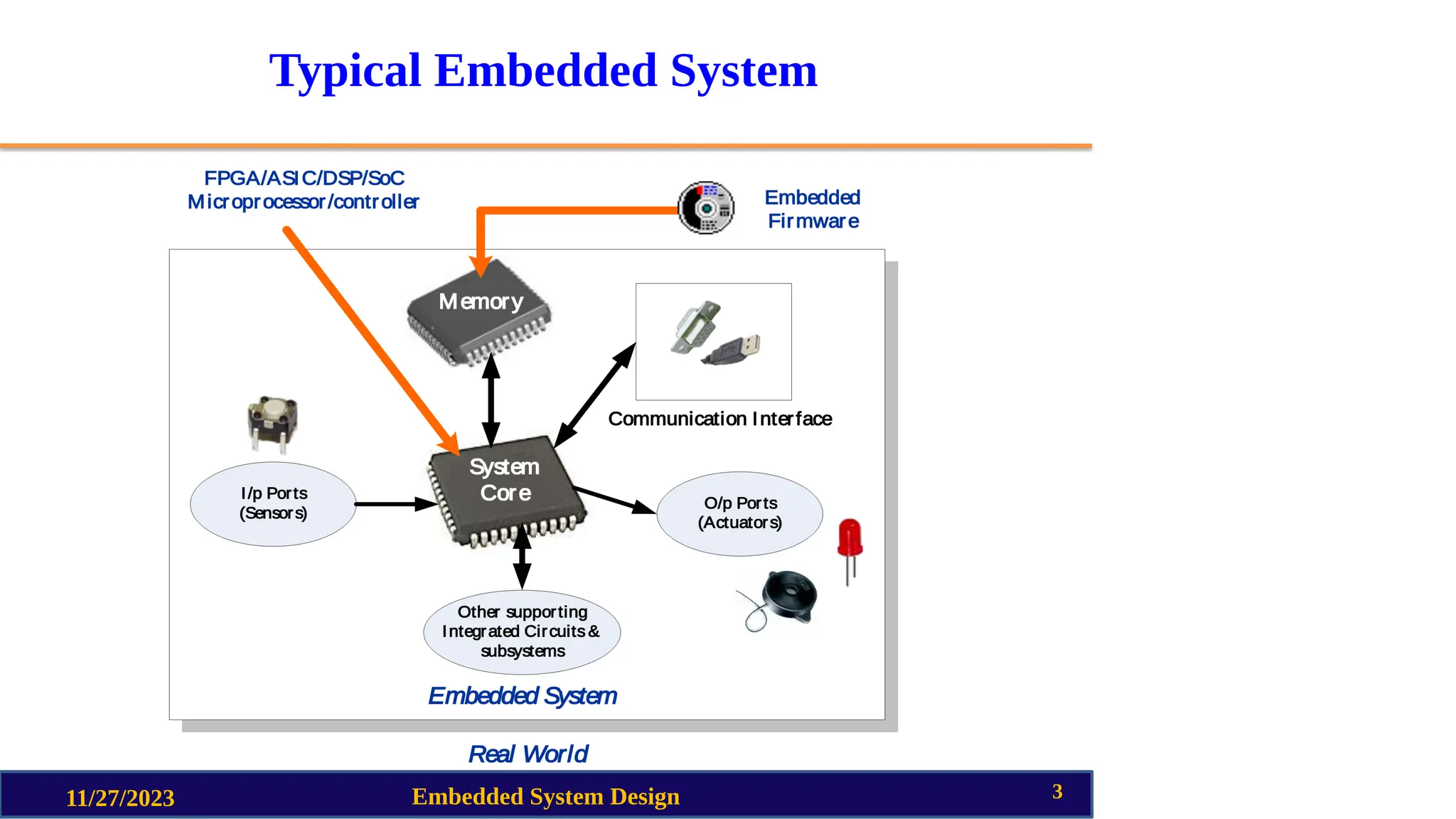
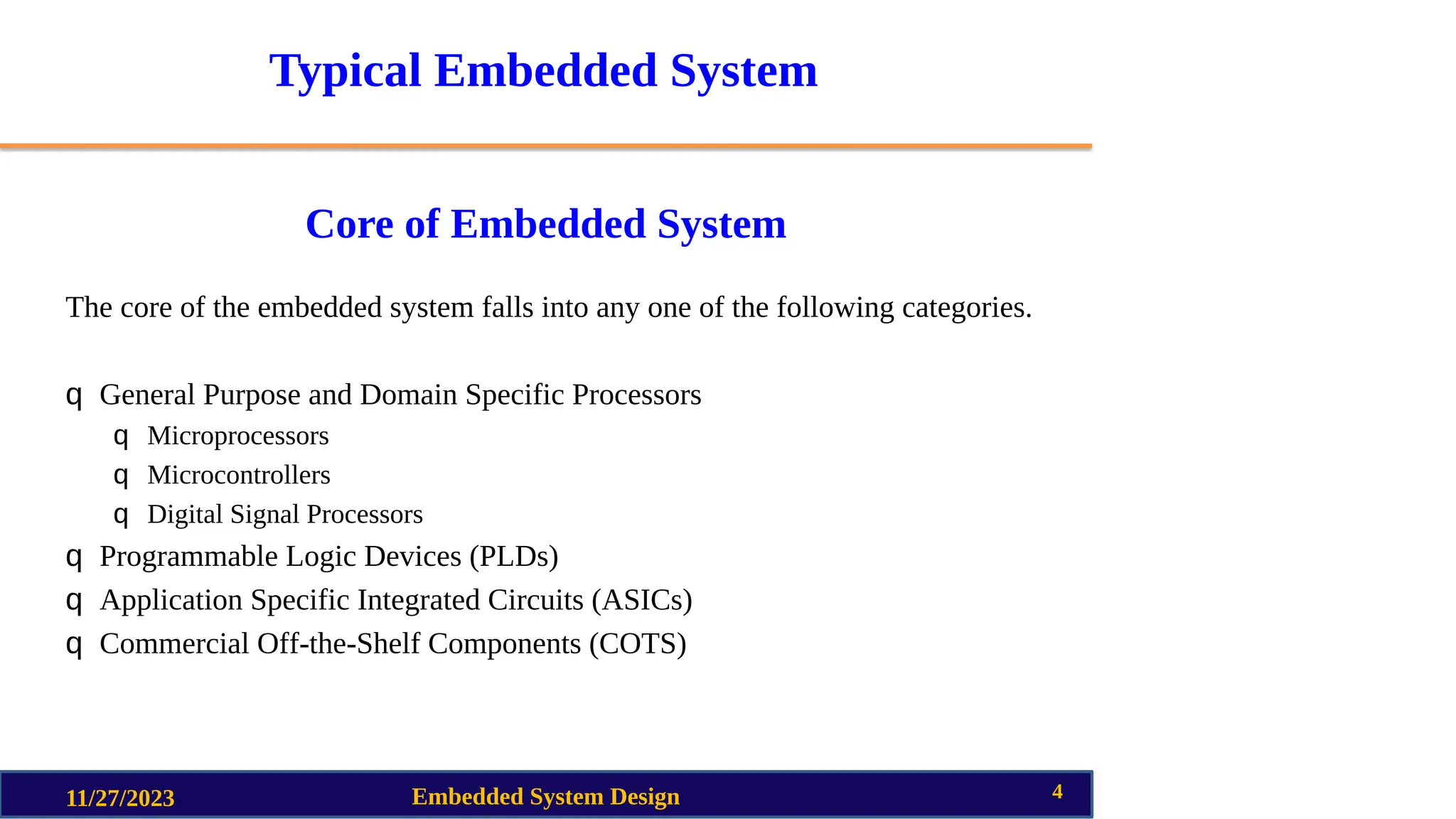
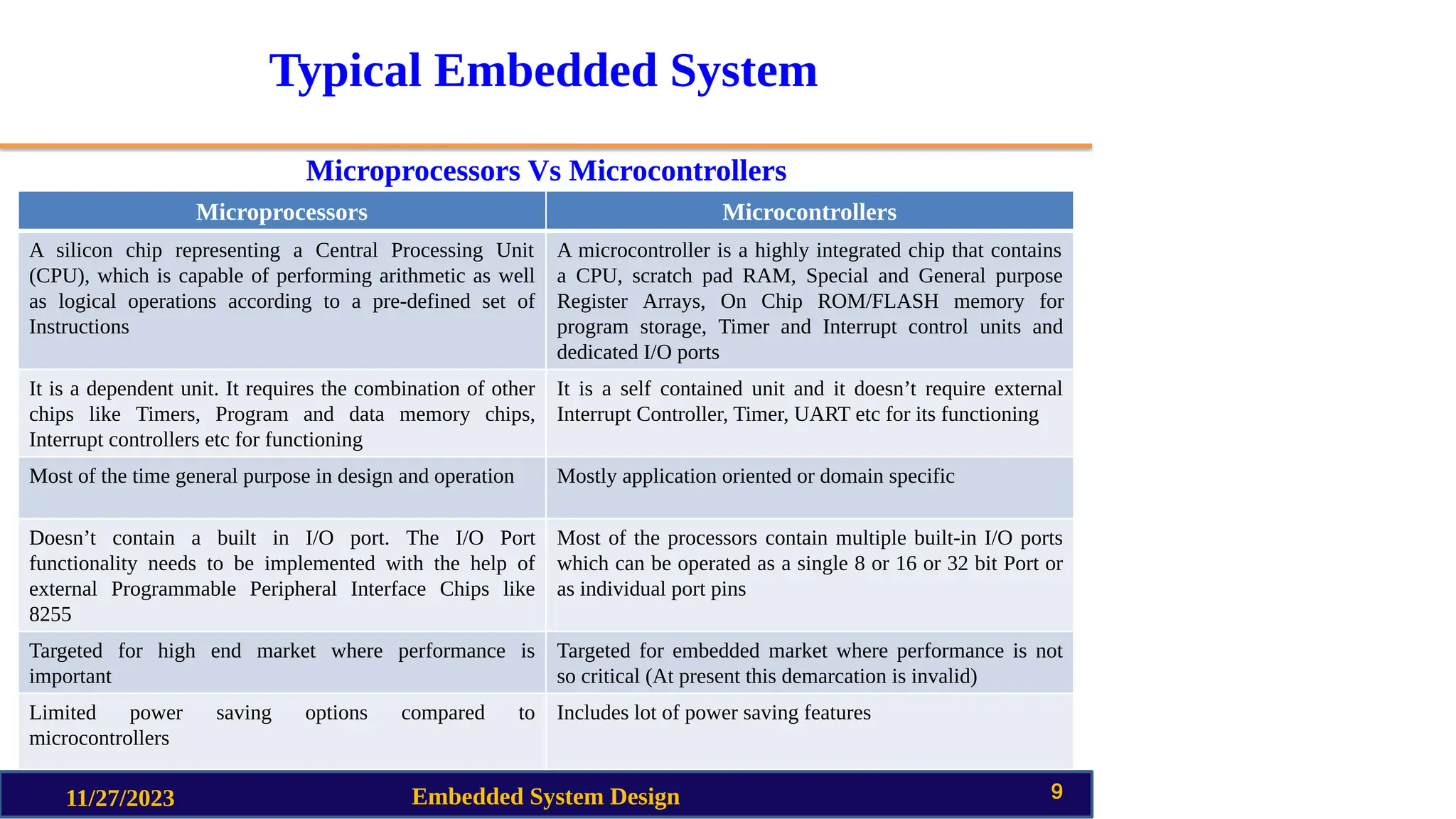
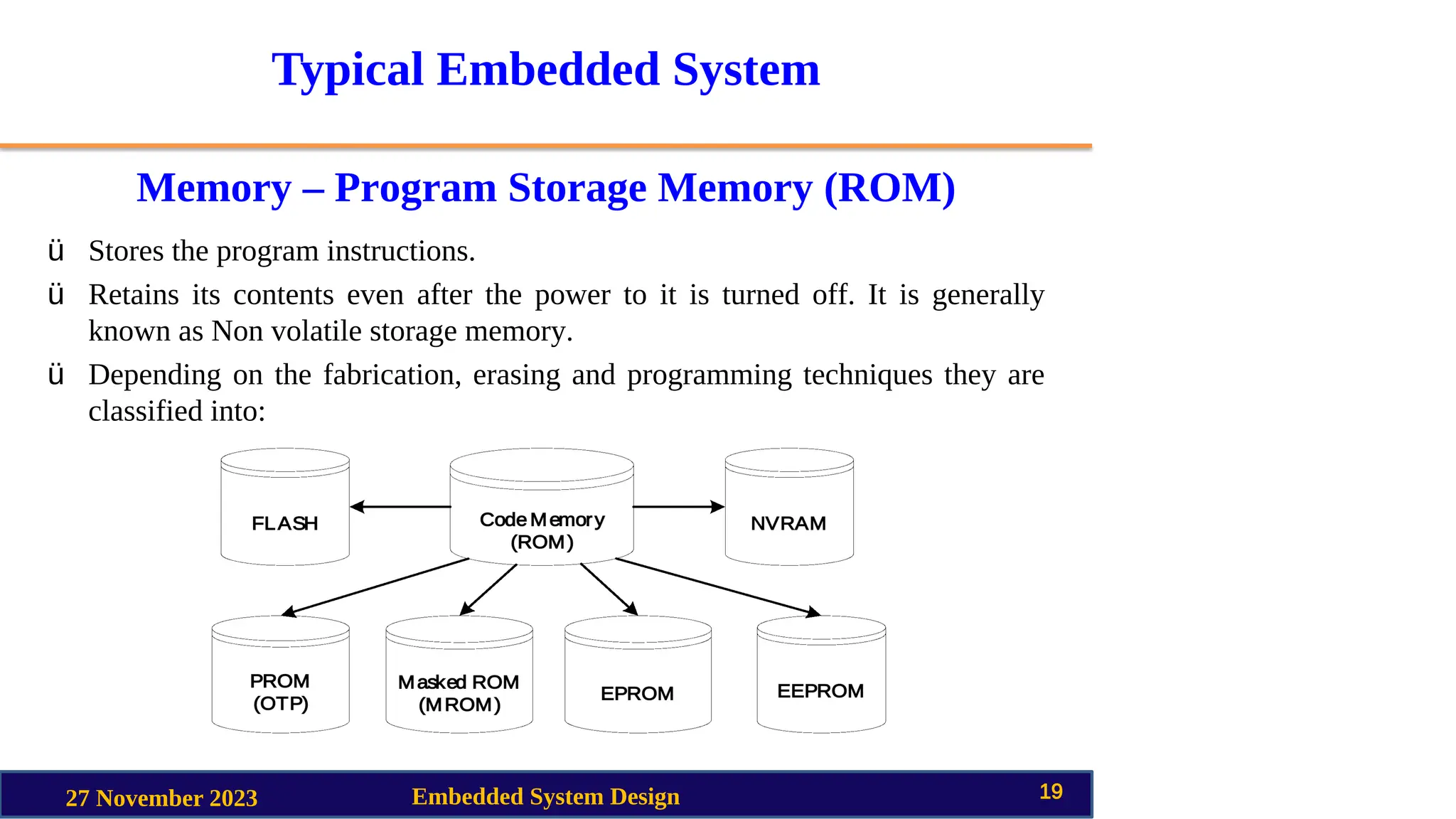
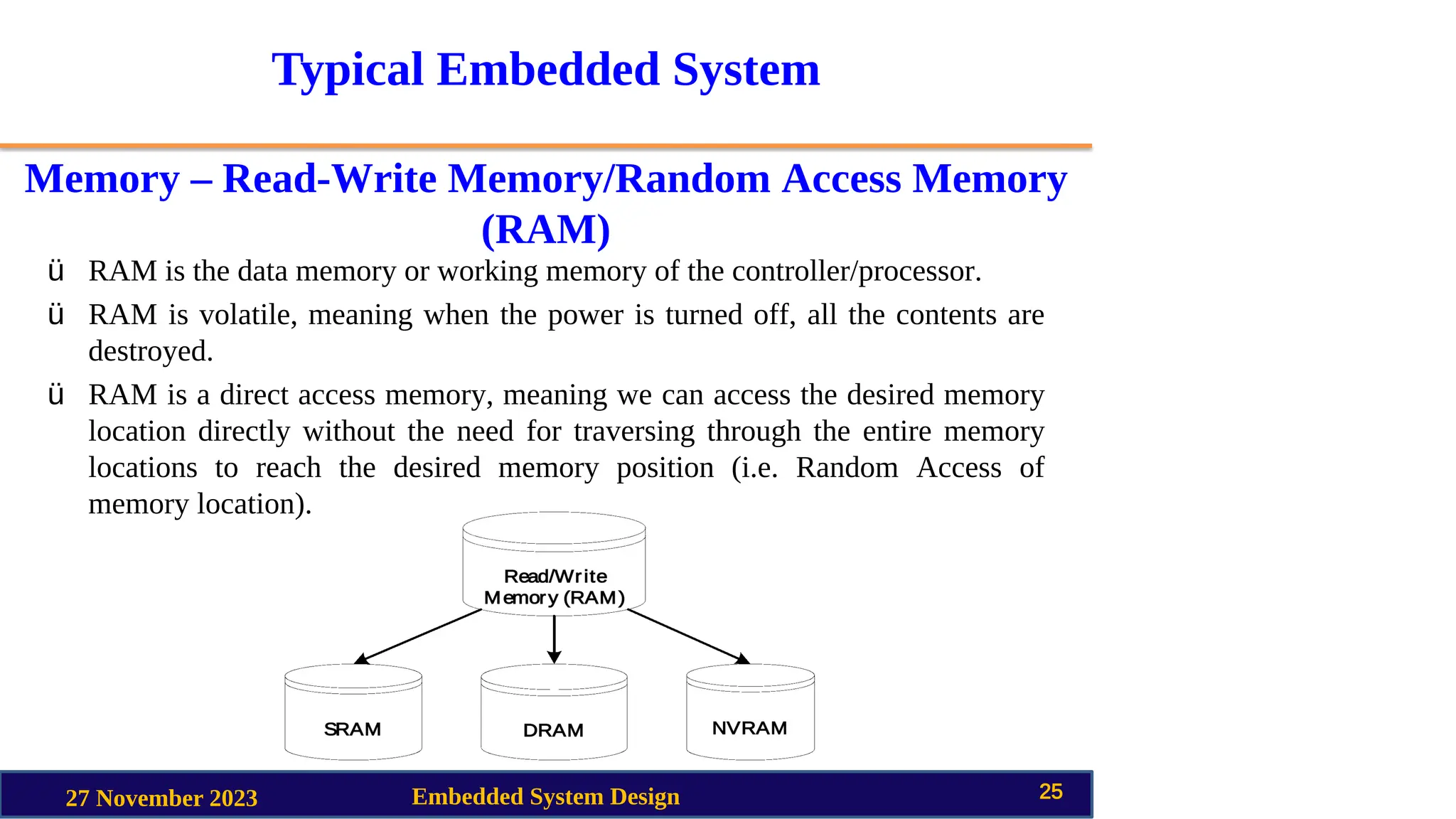
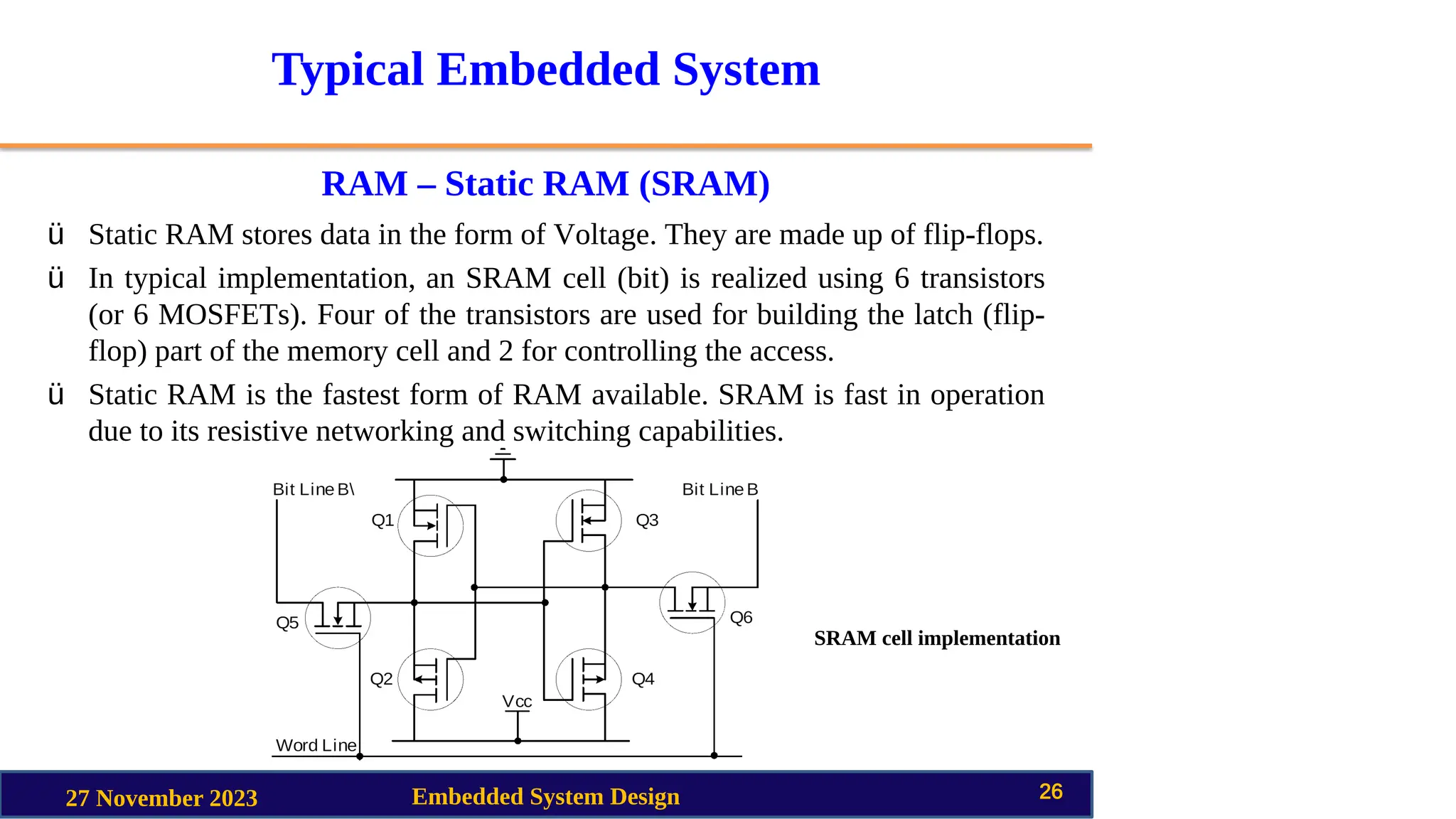
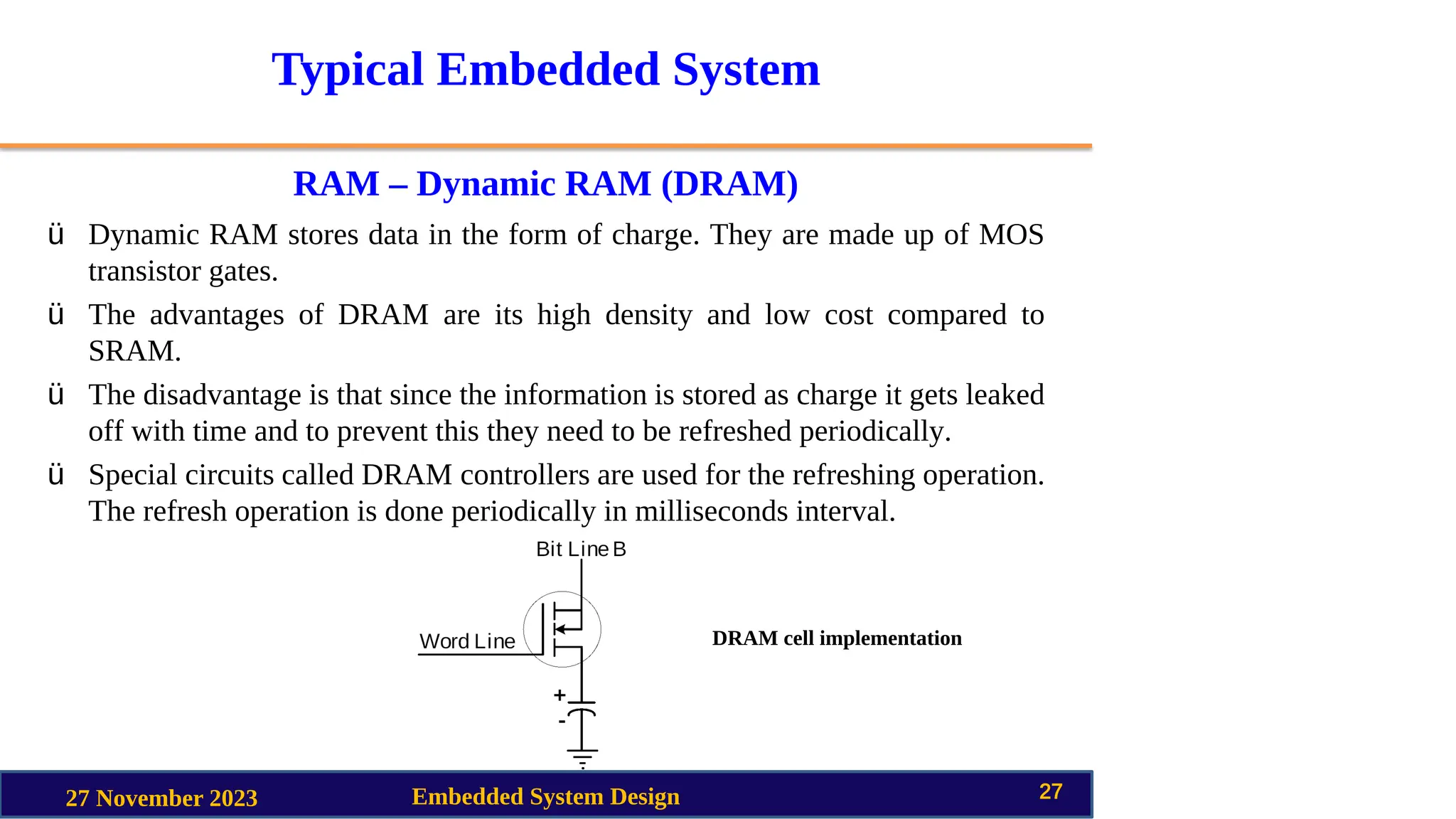
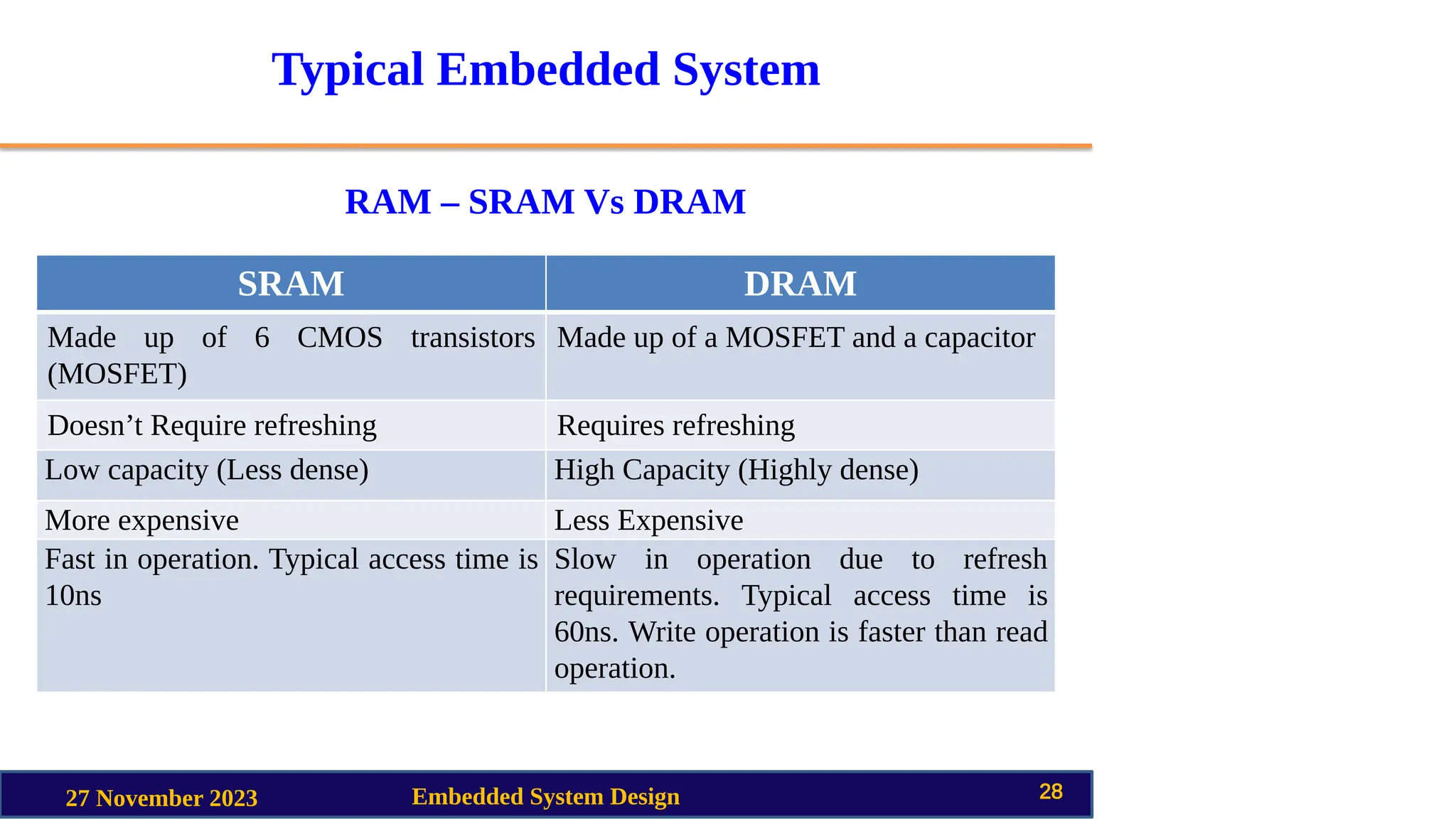
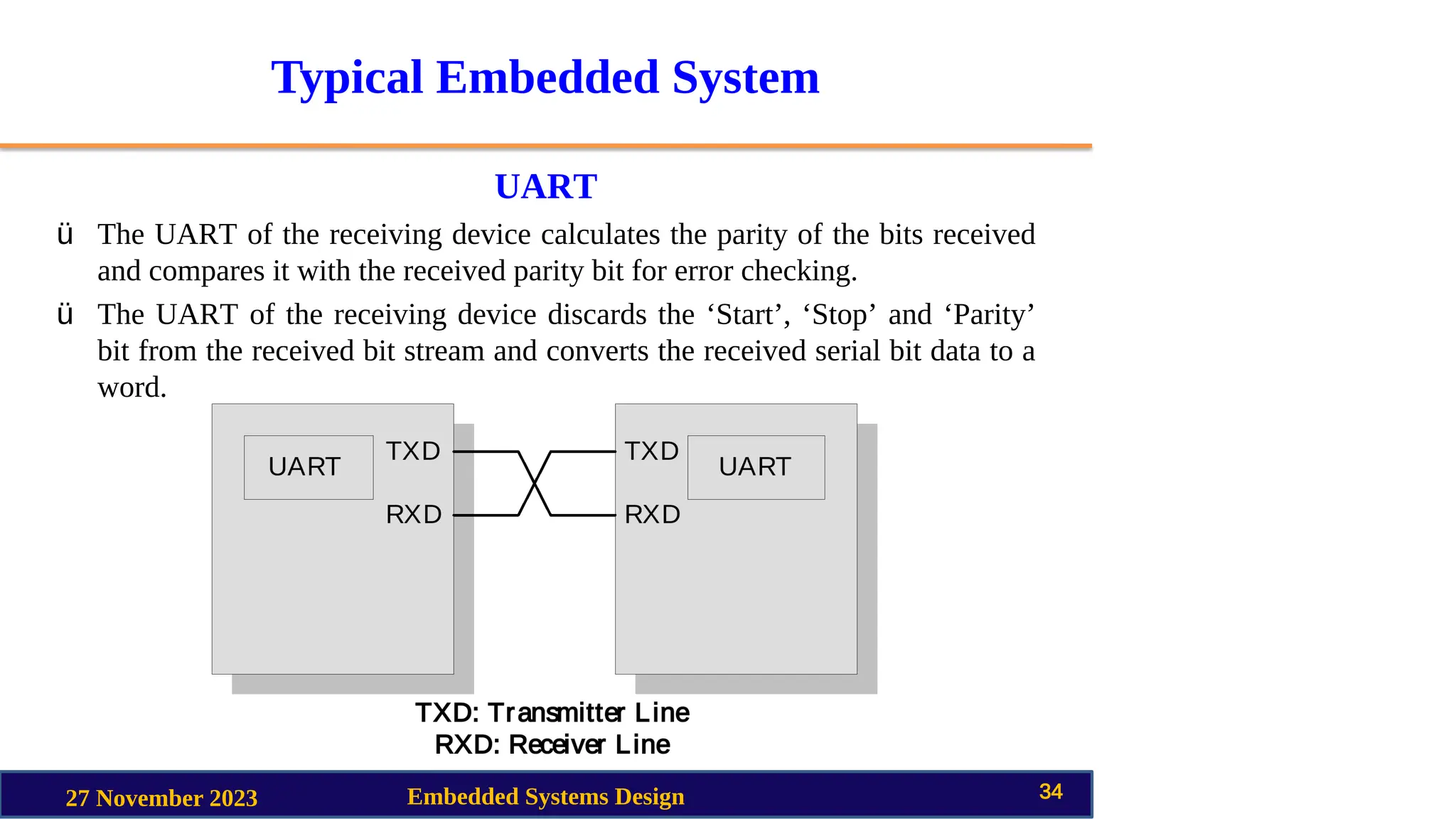
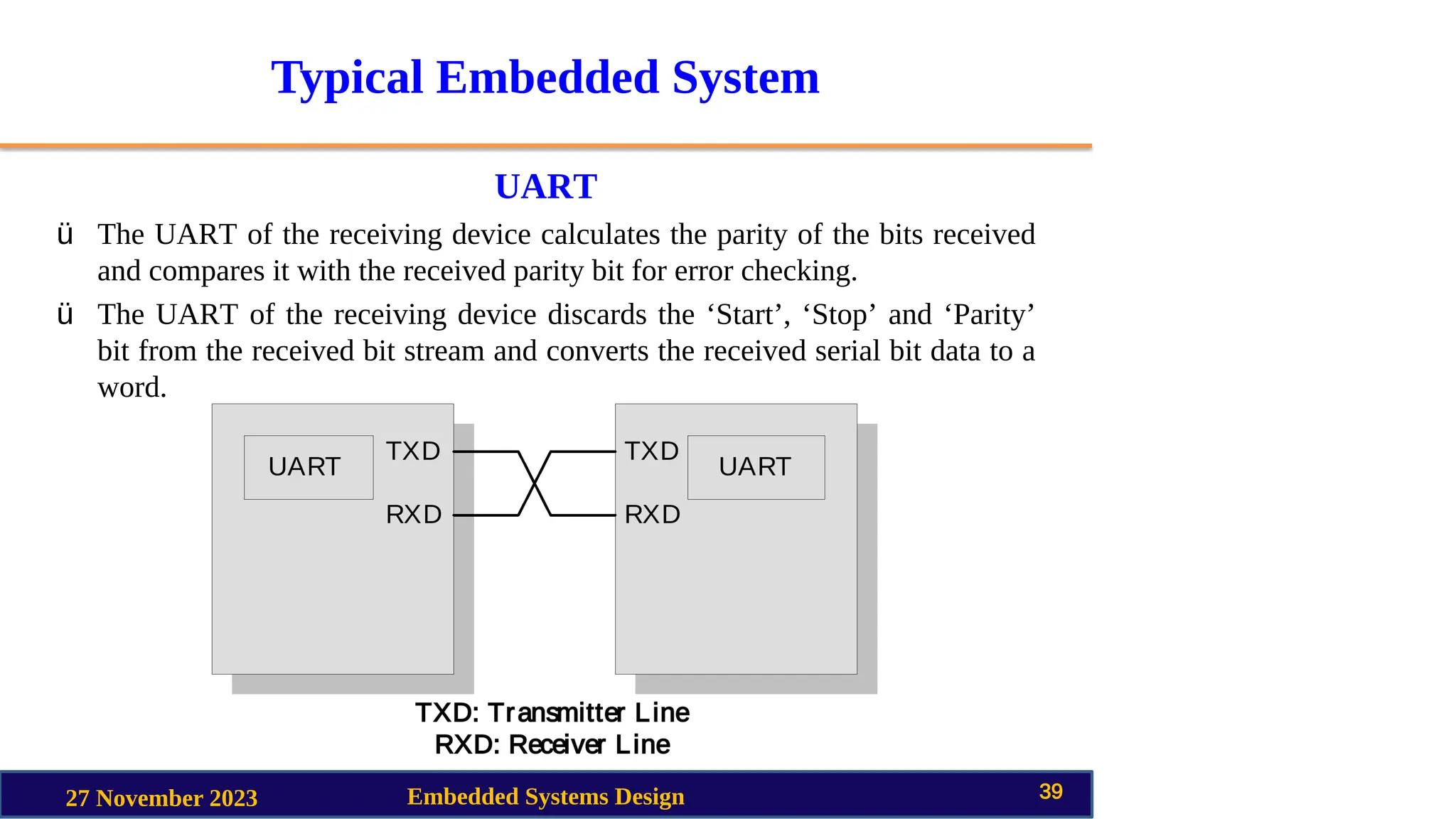
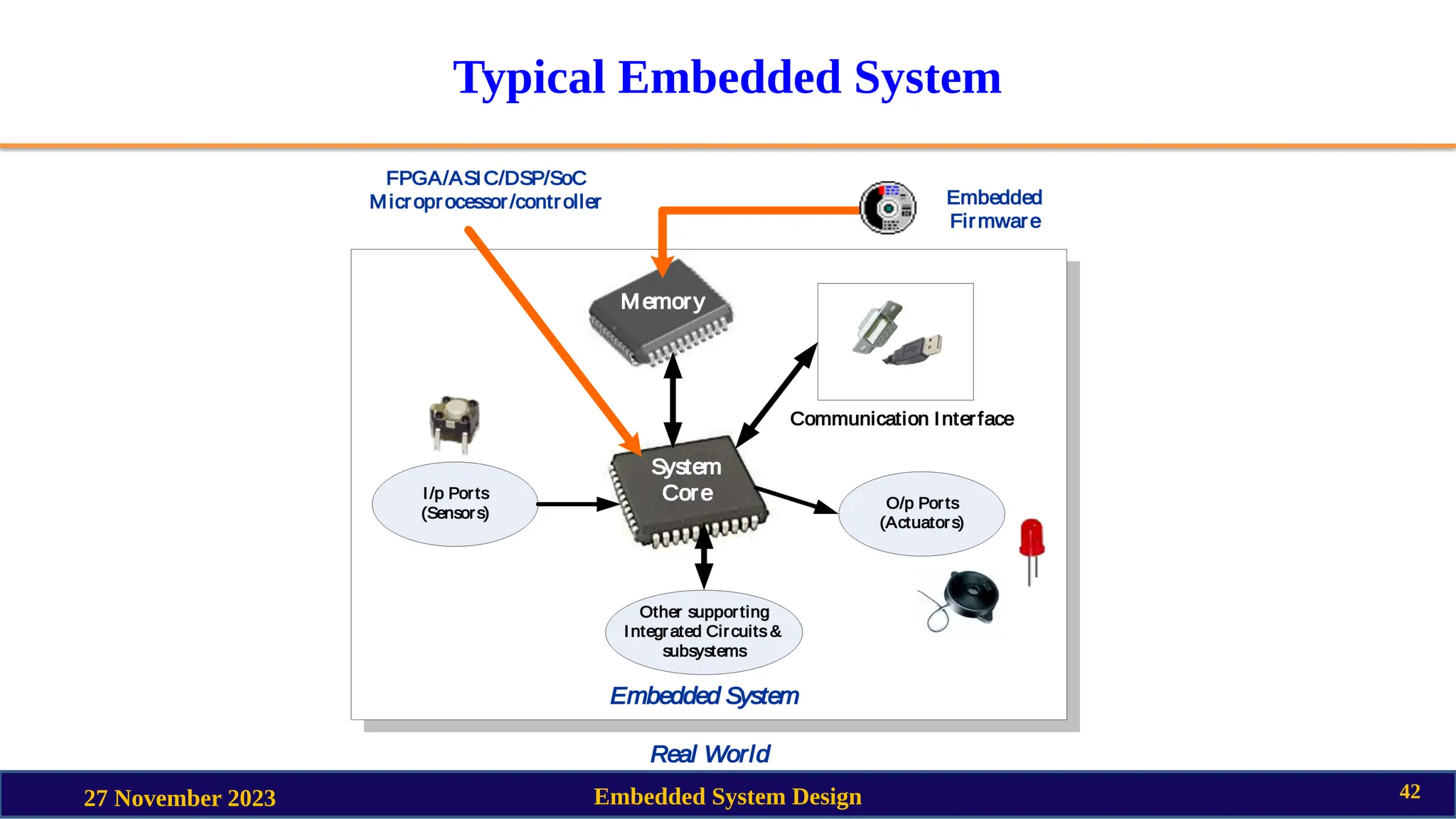
The document discusses typical components of an embedded system including the core, memory, sensors/actuators, and communication interfaces. It describes different types of cores like microprocessors, microcontrollers, and DSPs. It covers various types of memory like ROM, RAM, SRAM, and DRAM. It also provides details about typical on-board communication interfaces like UART and how asynchronous serial communication using UART works by sending start, stop and optional parity bits along with the data bits.