EE-371 : ControlSystems
Lecture#01
Introduction to Control Systems
Chapter # 01
Text Book: Control Systems Engineering by Norman S.
Nise 5th
Edition
Instructor: Dr. Neelma Naz
Class: BEE 14 A/B
School of Electrical Engineering and
Computer Science
Department of Electrical Engineering
1
3.
Course Information
Course Title:CONTROL SYSTEMS
Credit hrs: 3+1
Lab (yes)
Prerequisites For this Course: Calculus, Complex Variables and Transforms,
ENA
Instructor: Dr. Neelma Naz
e-mail :neelma.naz@seecs.edu.pk
SEECS, Room: A-213
Text Book:. Control Systems Engineering by Norman S. Nise , 6th
Edition
Reference Book(s):
1. Design of Feedback Control Systems by Stefani Shahian Savant Hostetter, Oxford Pakistan
2. Modern Control Engineering by Ogata Katsuhiko, Prentice Hall
3. Feedback Control Systems by Phillip and Harbor 4th
Edition
4. MODERN CONTROL SYSTEMS by RICHARD C DORF
3
4.
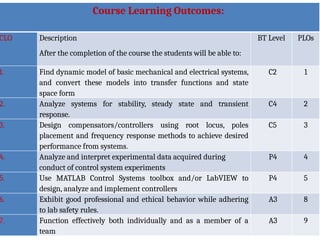
Course Learning Outcomes:
CLODescription
After the completion of the course the students will be able to:
BT Level PLOs
1. Find dynamic model of basic mechanical and electrical systems,
and convert these models into transfer functions and state
space form
C2 1
2. Analyze systems for stability, steady state and transient
response.
C4 2
3. Design compensators/controllers using root locus, poles
placement and frequency response methods to achieve desired
performance from systems.
C5 3
4. Analyze and interpret experimental data acquired during
conduct of control system experiments
P4 4
5. Use MATLAB Control Systems toolbox and/or LabVIEW to
design, analyze and implement controllers
P4 5
6. Exhibit good professional and ethical behavior while adhering
to lab safety rules.
A3 8
7. Function effectively both individually and as a member of a
team
A3 9
5.
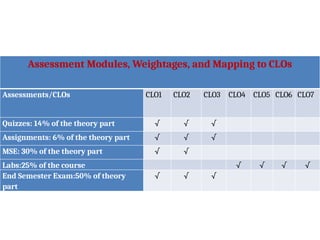
Assessment Modules, Weightages,and Mapping to CLOs
Assessments/CLOs CLO1 CLO2 CLO3 CLO4 CLO5 CLO6 CLO7
Quizzes: 14% of the theory part √ √ √
Assignments: 6% of the theory part √ √ √
MSE: 30% of the theory part √ √
Labs:25% of the course √ √ √ √
End Semester Exam:50% of theory
part
√ √ √
7
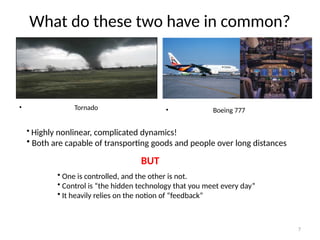
What do thesetwo have in common?
• Tornado • Boeing 777
• Highly nonlinear, complicated dynamics!
• Both are capable of transporting goods and people over long distances
BUT
• One is controlled, and the other is not.
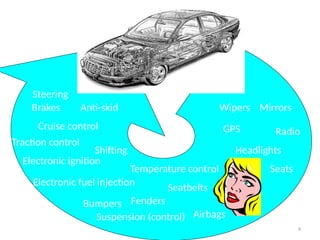
• Control is “the hidden technology that you meet every day”
• It heavily relies on the notion of “feedback”
8.
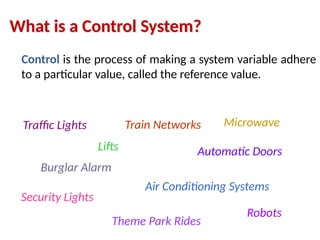
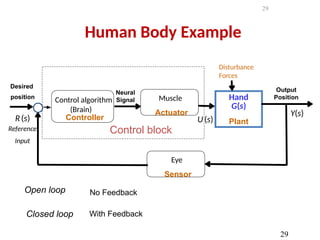
Control is theprocess of making a system variable adhere
to a particular value, called the reference value.
Traffic Lights
Lifts
Microwave
Air Conditioning Systems
Theme Park Rides
Automatic Doors
Burglar Alarm
Train Networks
Robots
What is a Control System?
Security Lights
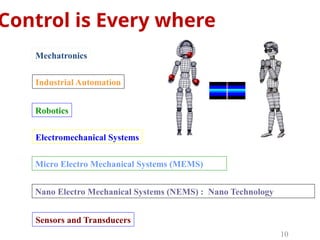
Mechatronics
Industrial Automation
Sensors andTransducers
Electromechanical Systems
Micro Electro Mechanical Systems (MEMS)
Nano Electro Mechanical Systems (NEMS) : Nano Technology
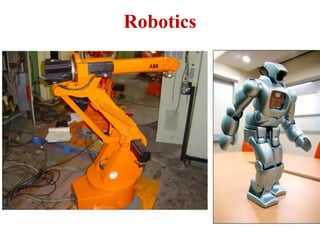
Robotics
Control is Every where
10
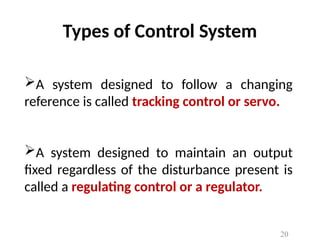
Types of ControlSystem
A system designed to follow a changing
reference is called tracking control or servo.
A system designed to maintain an output
fixed regardless of the disturbance present is
called a regulating control or a regulator.
20
21.
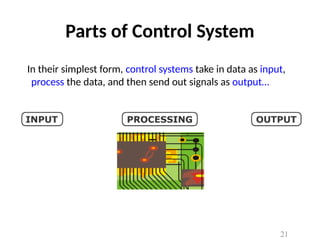
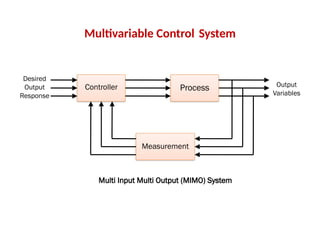
Parts of ControlSystem
In their simplest form, control systems take in data as input,
process the data, and then send out signals as output…
21
22.
Types of ControlSystem
There are two main types of control system…
Open Loop
System
Closed Loop
System
&
22
23.
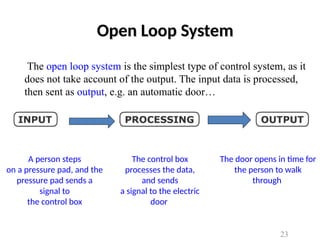
A person steps
ona pressure pad, and the
pressure pad sends a
signal to
the control box
The control box
processes the data,
and sends
a signal to the electric
door
The door opens in time for
the person to walk
through
Open Loop System
The open loop system is the simplest type of control system, as it
does not take account of the output. The input data is processed,
then sent as output, e.g. an automatic door…
23
24.
NUST
(Plant)
Students
(Actuator)
Teaching
Activities
(Controller)
NUST
Environment
Disturbance
Parties, Chit Chat
Games,TV, Net
Output
Result
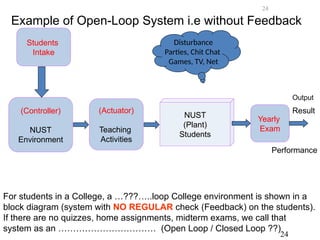
For students in a College, a …???…..loop College environment is shown in a
block diagram (system with NO REGULAR check (Feedback) on the students).
If there are no quizzes, home assignments, midterm exams, we call that
system as an …………………………… (Open Loop / Closed Loop ??)
Yearly
Exam
Performance
Students
Intake
Example of Open-Loop System i.e without Feedback
24
24
25.
Feedback
• Feedback isa key tool that can be used to
modify the behavior of a system.
• This behavior altering effect of feedback is a
key mechanism that control engineers exploit
deliberately to achieve the objective of acting
on a system to ensure that the desired
performance specifications are achieved.
25
26.
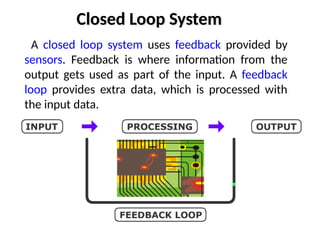
Closed Loop System
Aclosed loop system uses feedback provided by
sensors. Feedback is where information from the
output gets used as part of the input. A feedback
loop provides extra data, which is processed with
the input data.
27.
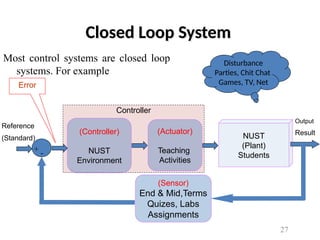
Most control systemsare closed loop
systems. For example
Closed Loop System
Controller
NUST
(Plant)
Students
(Actuator)
Teaching
Activities
(Controller)
NUST
Environment
Reference
(Standard)
(Sensor)
End & Mid,Terms
Quizes, Labs
Assignments
Output
Result
+ -
Error
Disturbance
Parties, Chit Chat
Games, TV, Net
27
28.
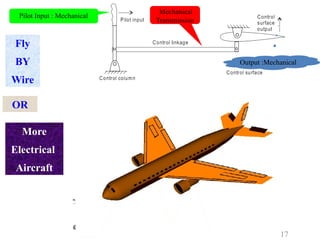
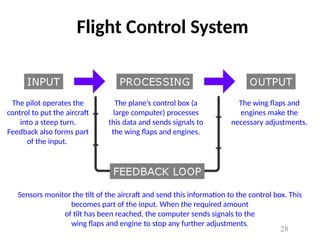
Flight Control System
Thepilot operates the
control to put the aircraft
into a steep turn.
Feedback also forms part
of the input.
The plane’s control box (a
large computer) processes
this data and sends signals to
the wing flaps and engines.
The wing flaps and
engines make the
necessary adjustments.
Sensors monitor the tilt of the aircraft and send this information to the control box. This
becomes part of the input. When the required amount
of tilt has been reached, the computer sends signals to the
wing flaps and engine to stop any further adjustments.
28
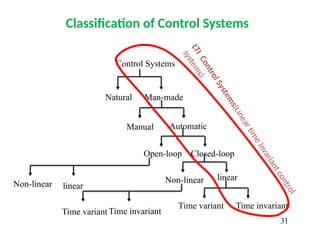
Classification of ControlSystems
Control Systems
Natural Man-made
Manual Automatic
Open-loop Closed-loop
Non-linear linear
Time variant Time invariant
Non-linear linear
Time variant Time invariant
L
T
I
C
o
n
t
r
o
l
S
y
s
t
e
m
s
(
L
i
n
e
a
r
ti
m
e
i
n
v
a
r
i
a
n
t
c
o
n
t
r
o
l
s
y
s
t
e
m
s
)
31
Editor's Notes
#16 Fly-by-wire (FBW) is a system that replaces the conventional manual flight controls of an aircraft with an electronic interface. The movements of flight controls are converted to electronic signals transmitted by wires (hence the fly-by-wire term), and flight control computers determine how to move the actuators at each control surface to provide the ordered response.
#25 Feedback is a very heart of control. Three examples are given for feedback systems in the book. Students are encouraged to read Section 1.2.
#27 For students in a College, a …???…… loop College environment is shown in a block diagram (system with regular check on the students). If there are no quizzes, home assignments, midterm exams, we call that system as
an …………………………….(Open/Closed loop)