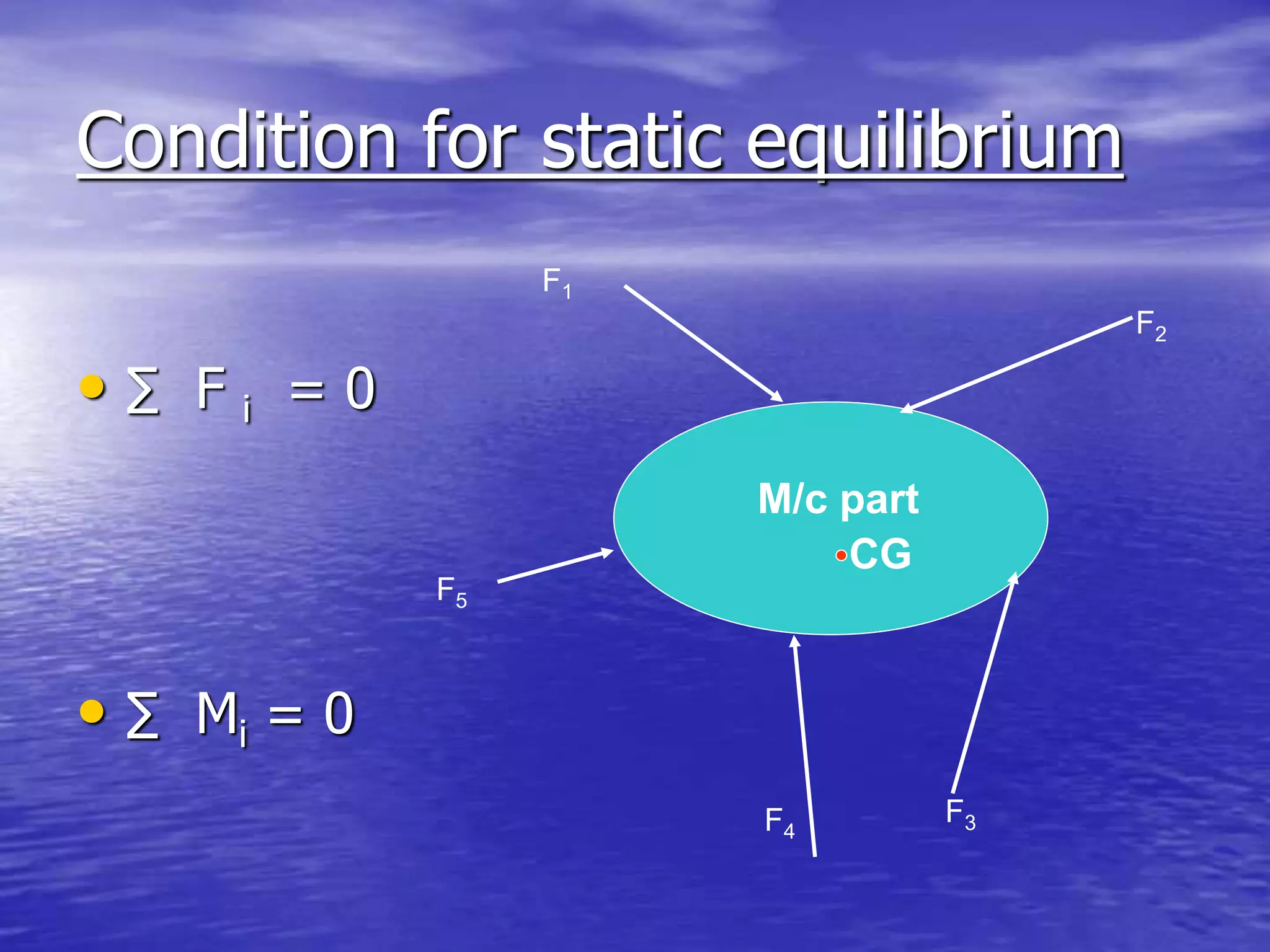
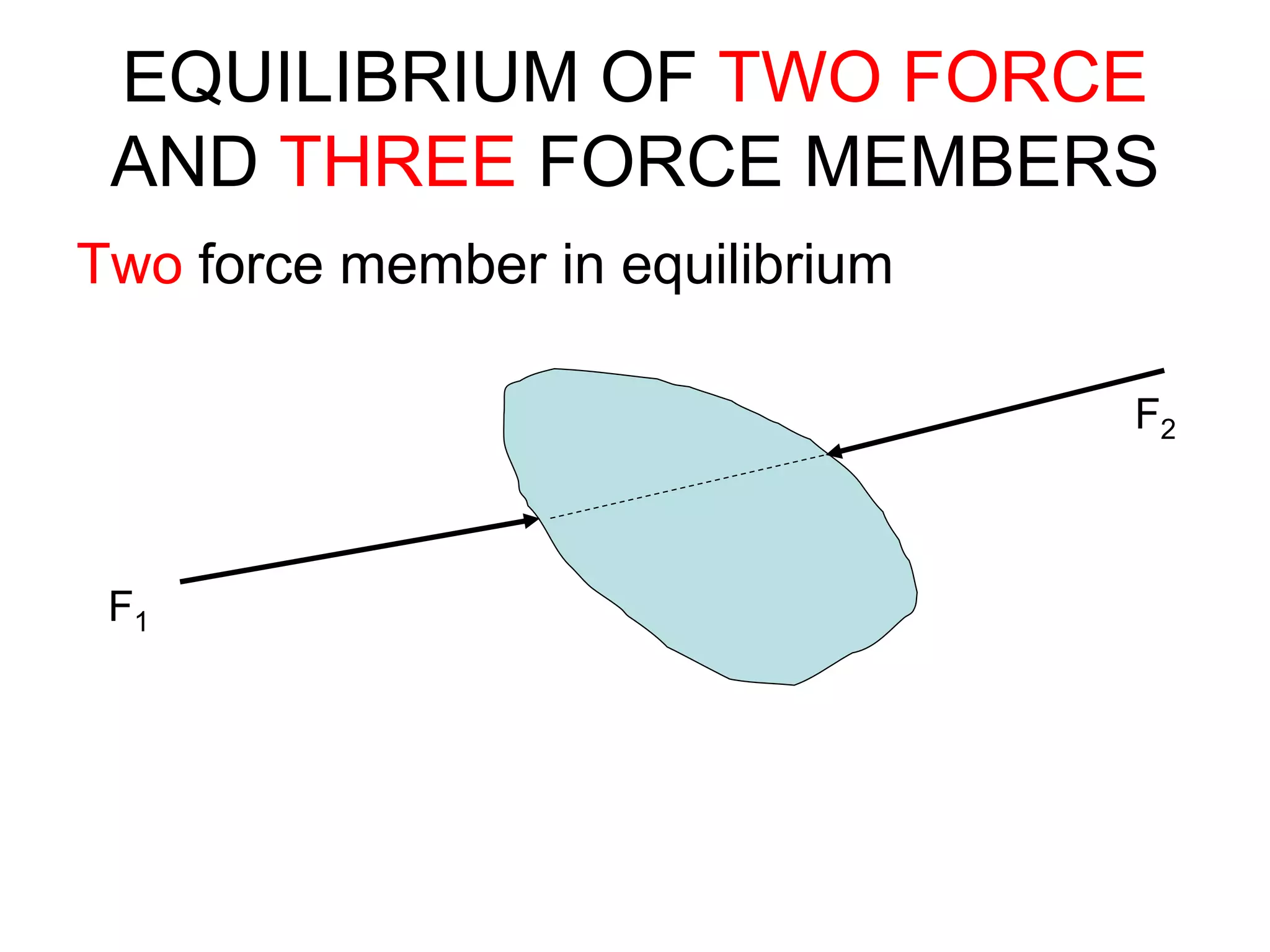
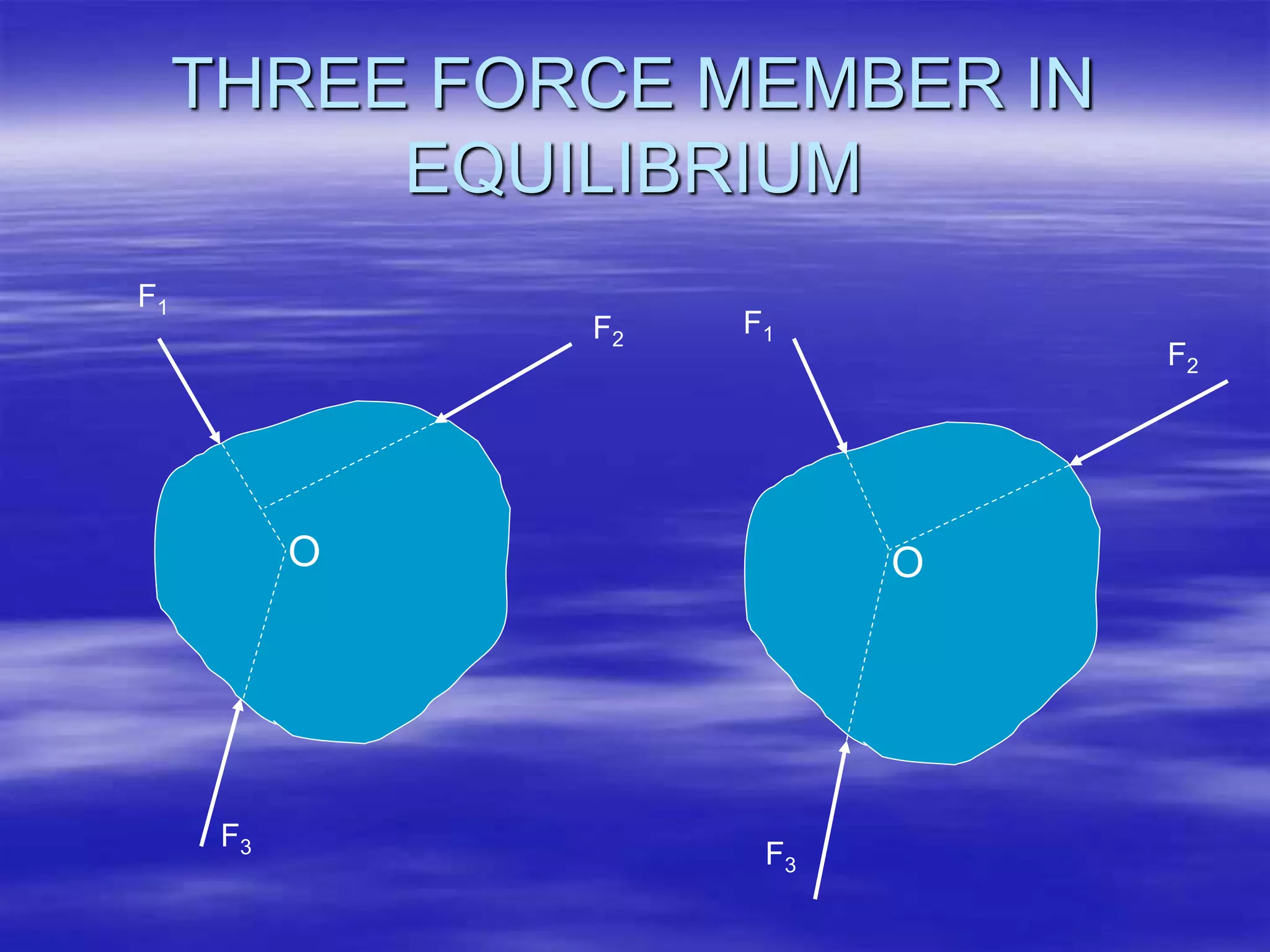
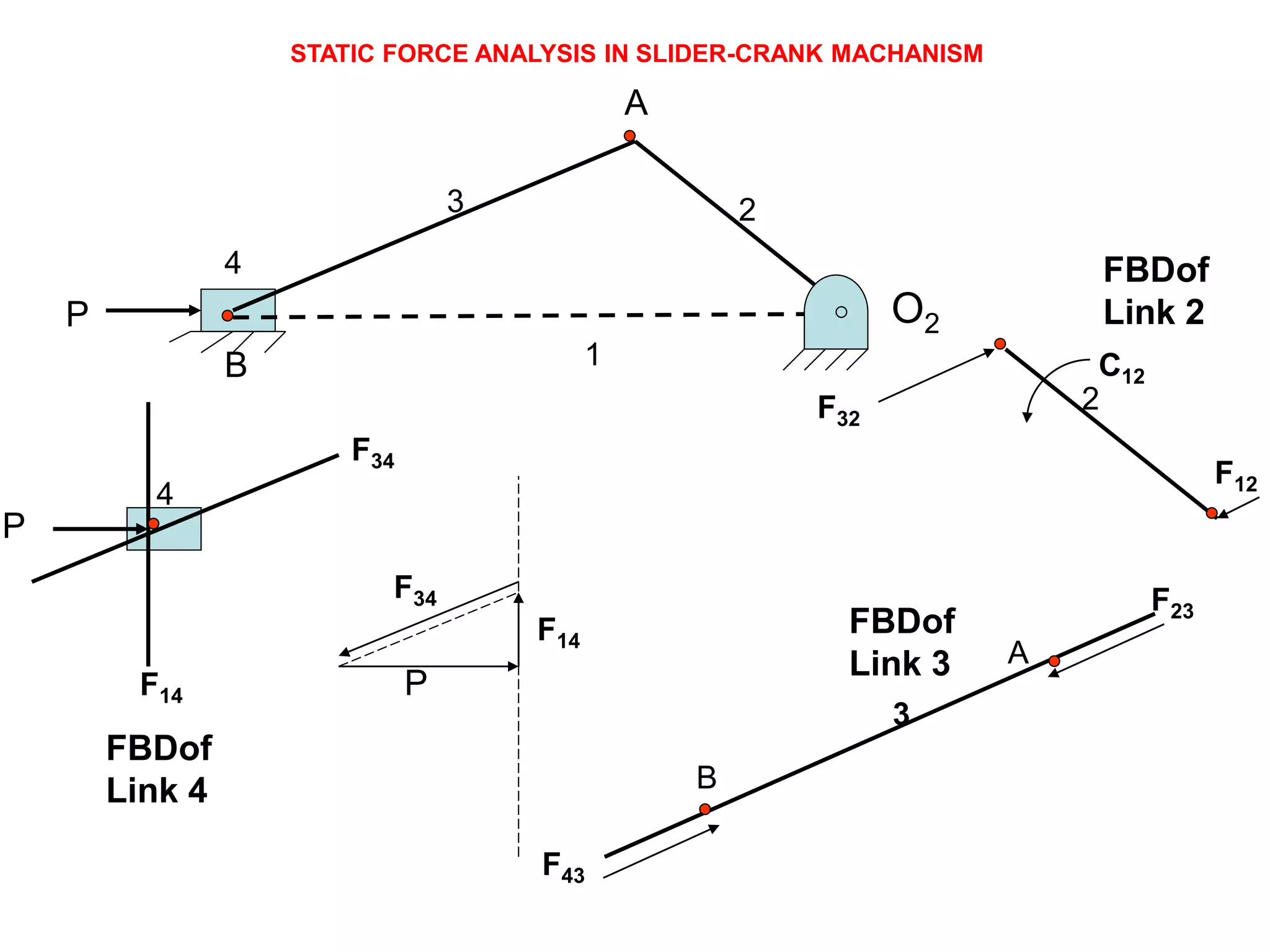
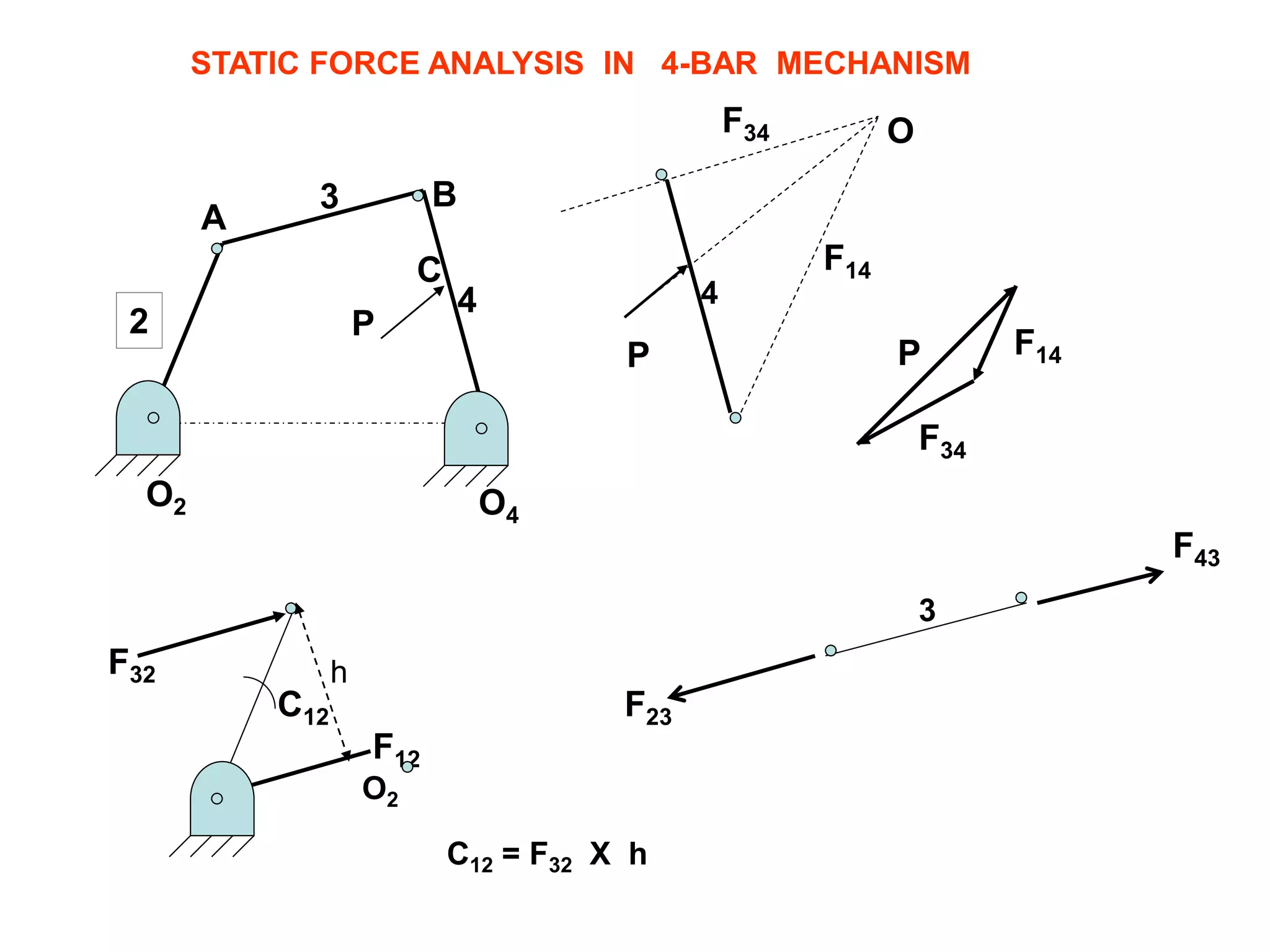
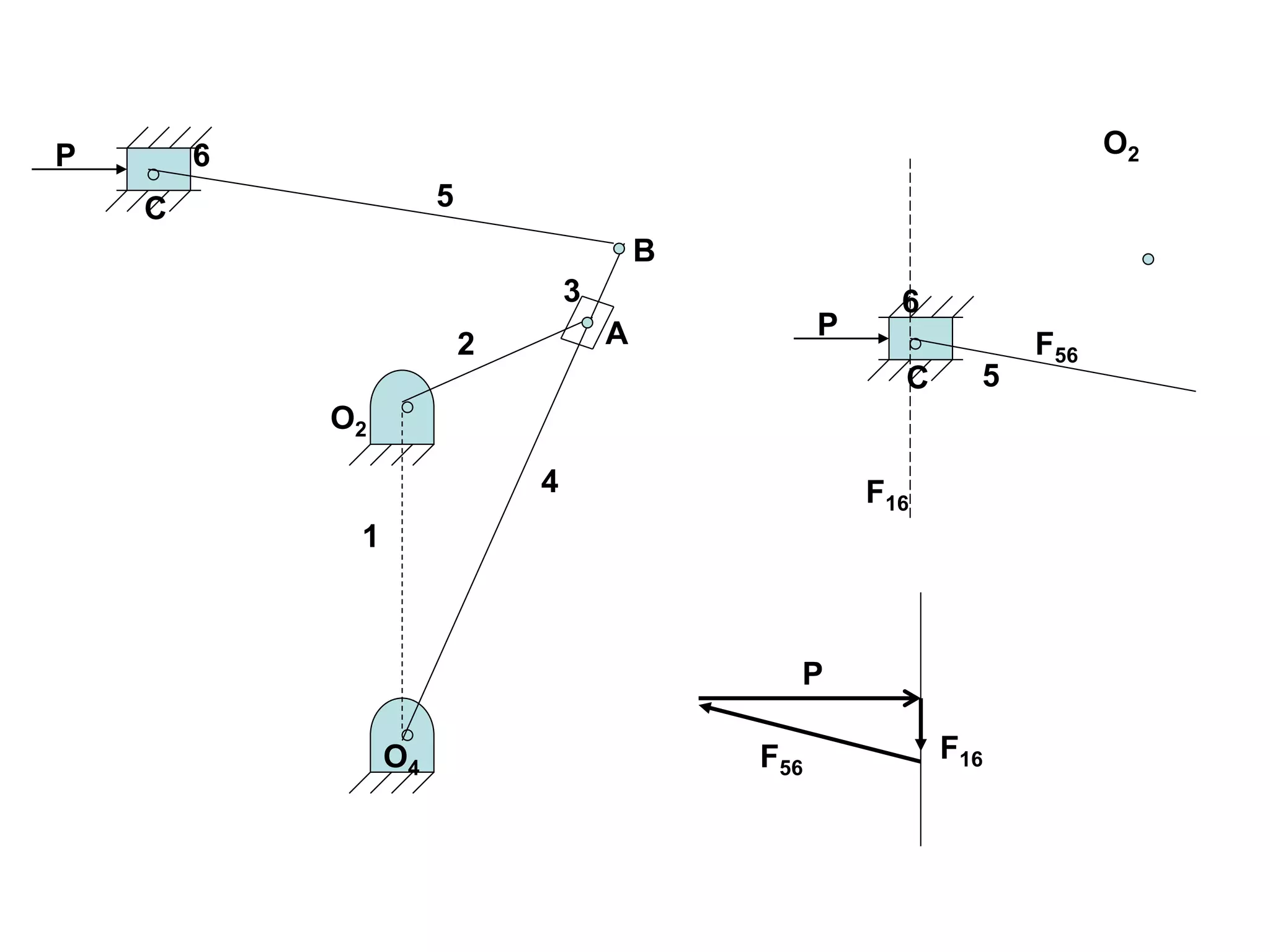
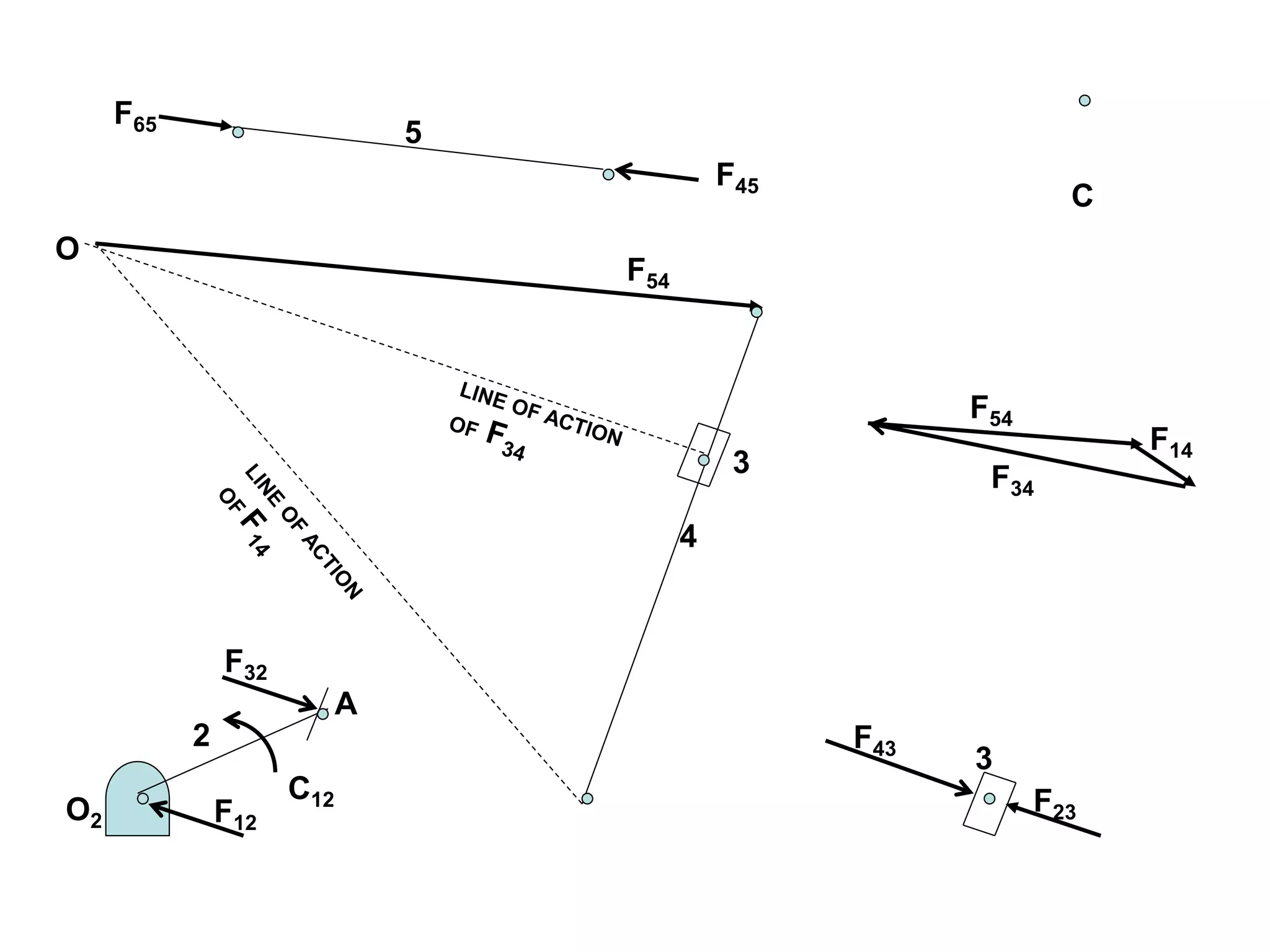
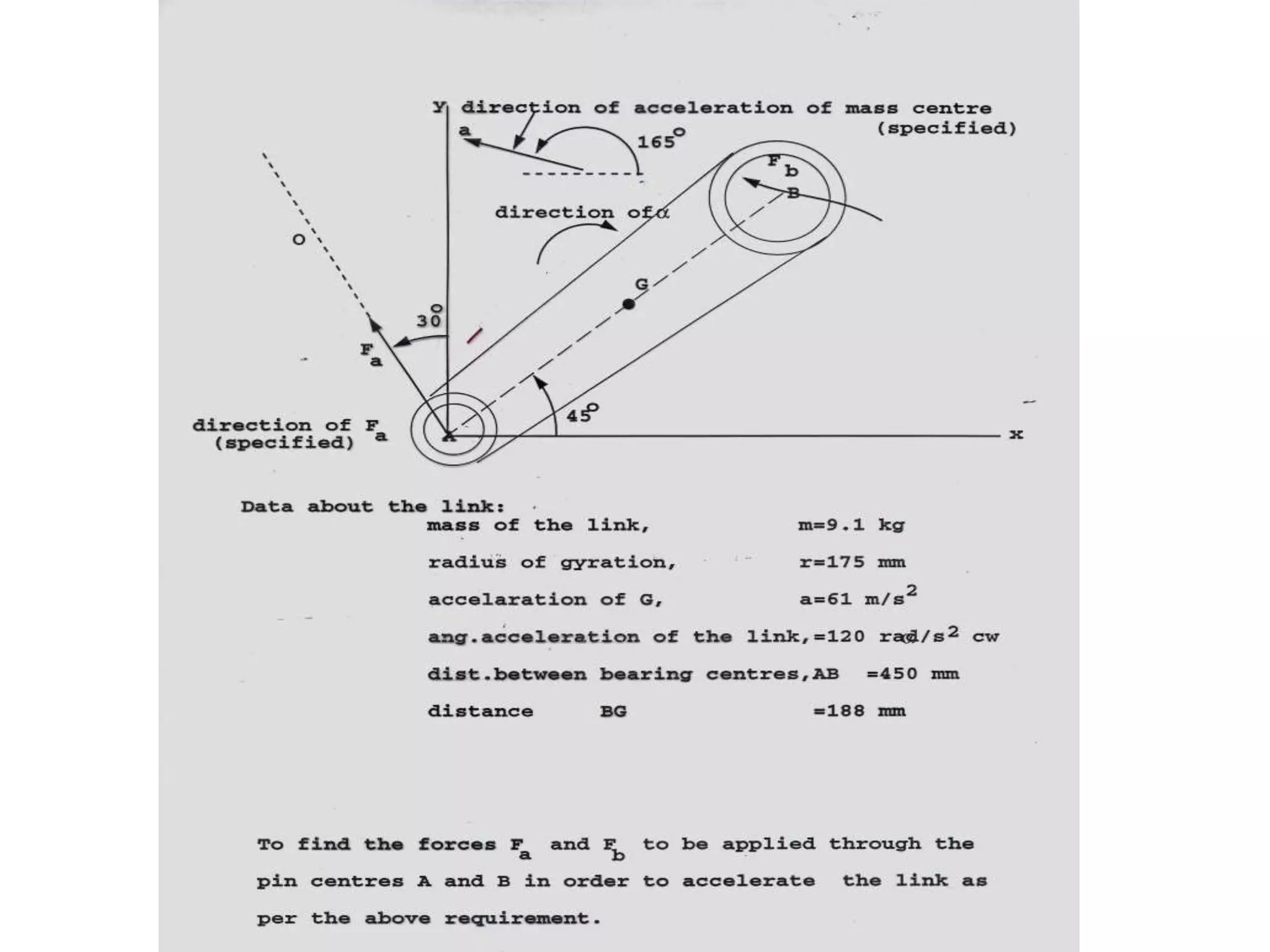
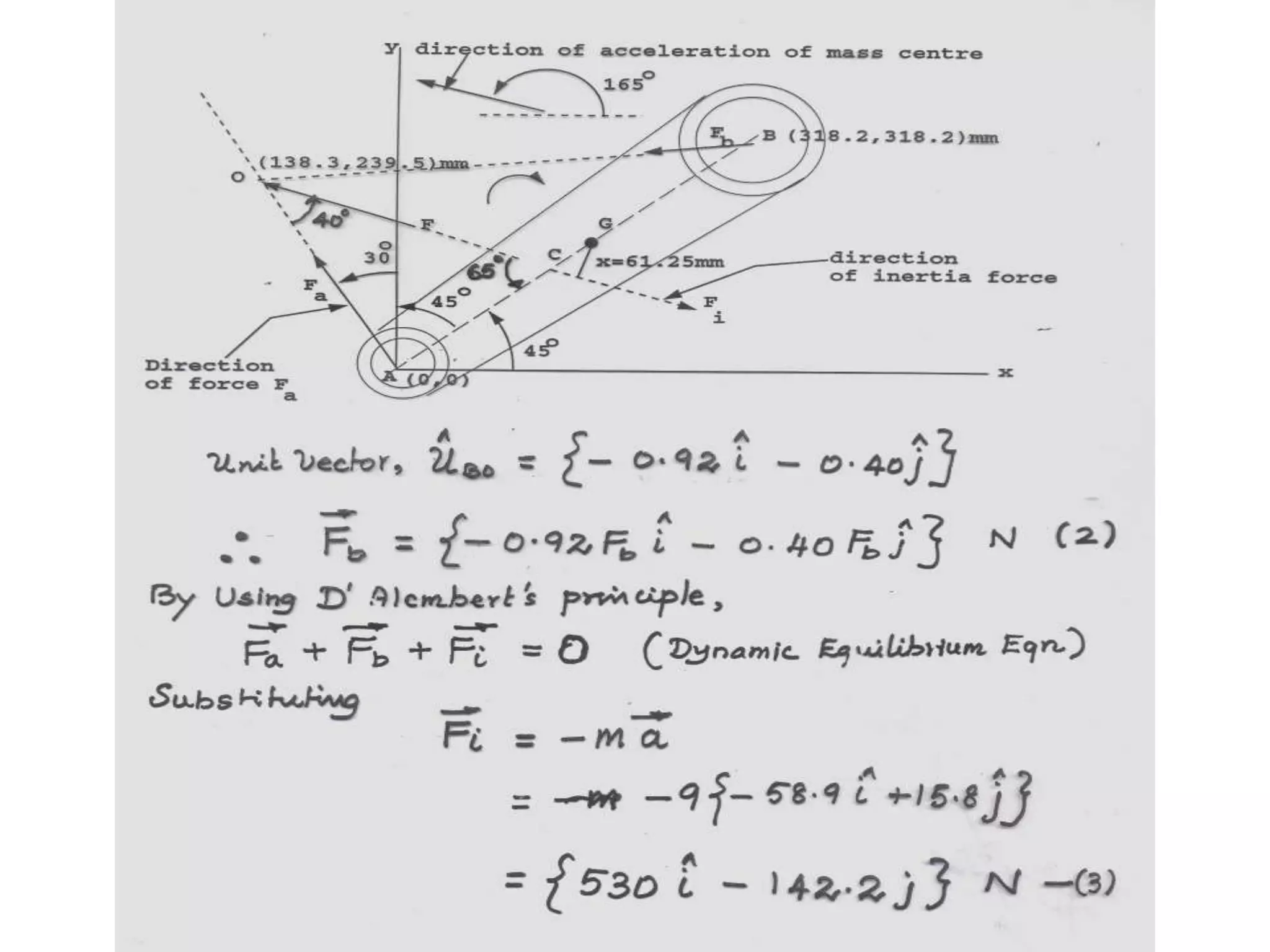
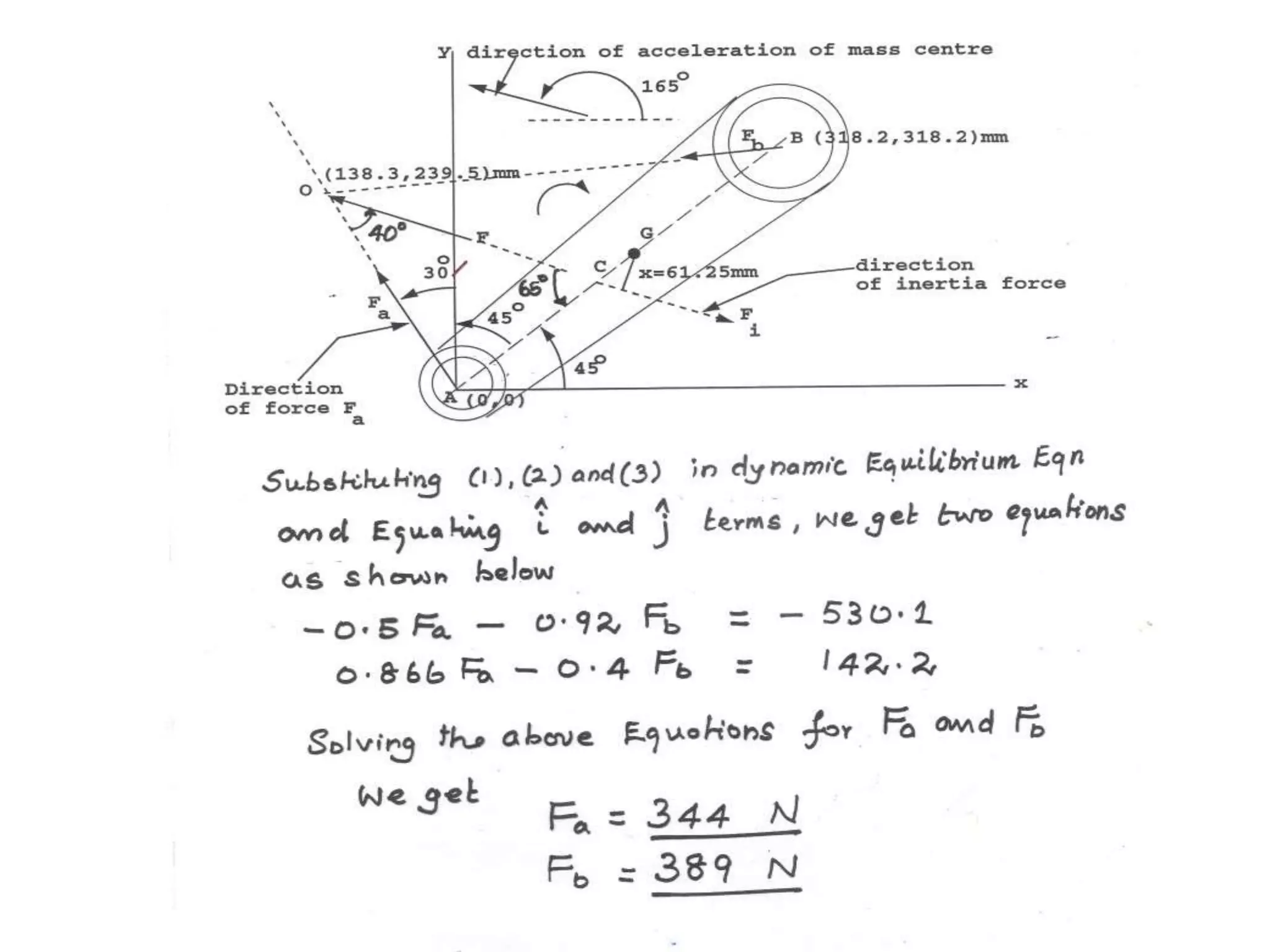
This document discusses static force analysis in machines. It explains that static force analysis is used to evaluate the forces acting on machine members in a particular configuration when the machine is in static equilibrium. The goals are to find the load carried by each part and analyze the equilibrium of two and three force members. It also discusses different types of forces including applied, constraint, friction, and inertia forces. Equations for static equilibrium are provided. Examples of static force analysis on slider-crank and 4-bar mechanisms are given. D'Alembert's principle for including inertia forces is also summarized.