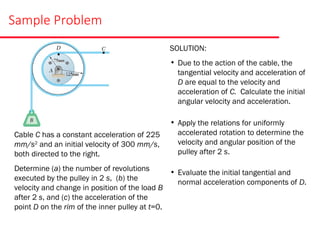
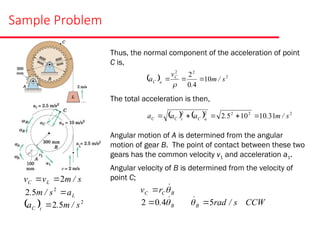
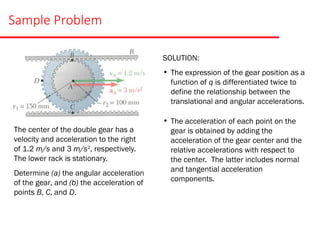
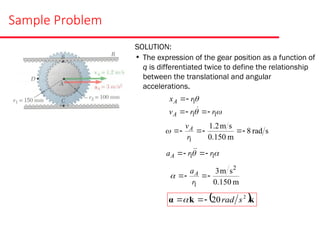
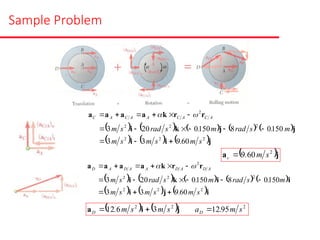
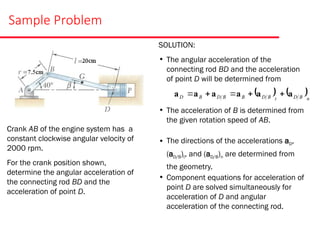
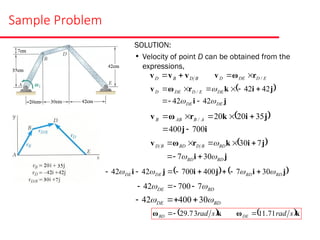
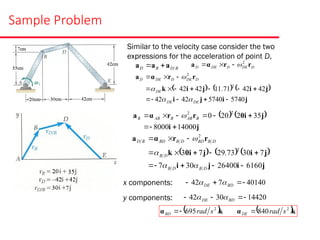
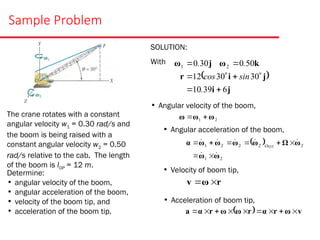
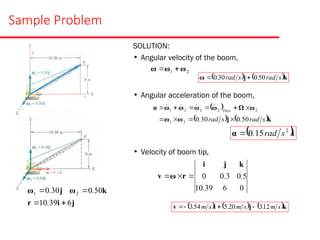
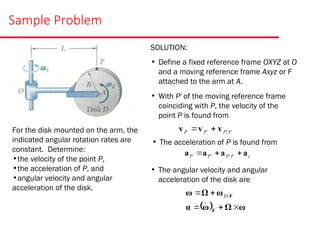
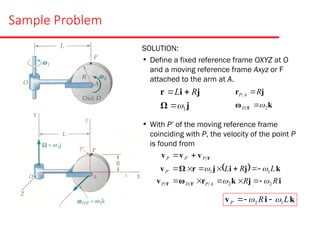
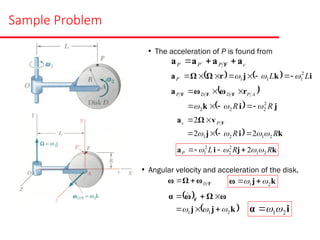
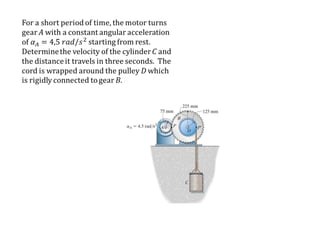
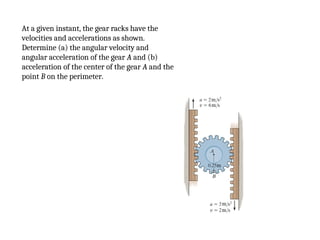
The document presents various sample problems related to dynamics, particularly focusing on the acceleration, velocity, and angular motion of different mechanical systems involving pulleys, gears, and connecting rods. Each problem includes detailed calculations and solutions for parameters such as revolutions, tangential and normal acceleration, and angular velocity. It emphasizes the application of relationships in uniformly accelerated rotation and the principles of motion in mechanical systems.