

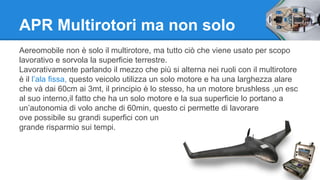
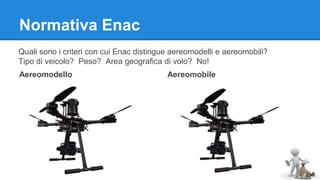















Il documento esplora i droni, noti anche come UAV, le loro origini militari, il funzionamento dei multirotori e i vari tipi di configurazioni. Vengono discutibili diversi strumenti e campi di applicazione, come videoriprese, agricoltura di precisione e monitoraggio ambientale. Inoltre, il testo evidenzia le normative ENAC e i potenziali usi futuri dei droni in operazioni di soccorso e trasporto.












































![[Webinar] Il telerilevamento da droni aerei: I sensori PANOPTES nelle ispezio...](https://cdn.slidesharecdn.com/ss_thumbnails/webinardronidargeniopanoptes021214-150128102053-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)