Downloaded 14 times
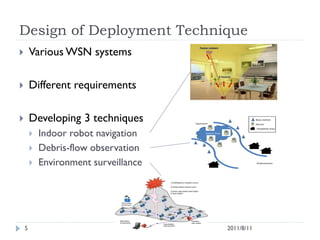
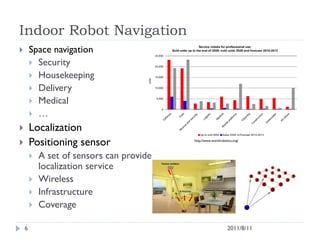
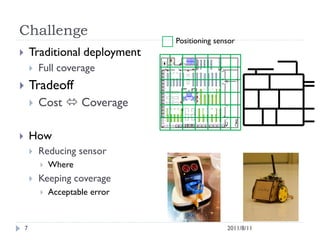
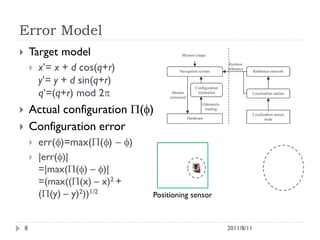
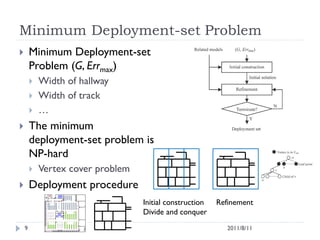

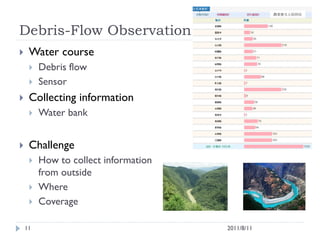
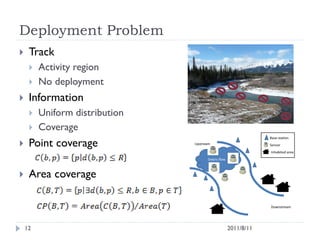
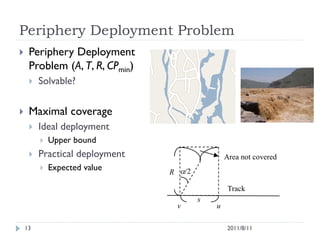
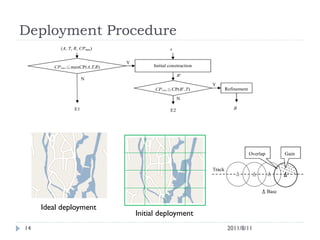
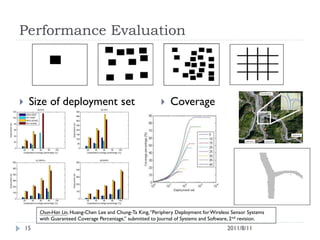
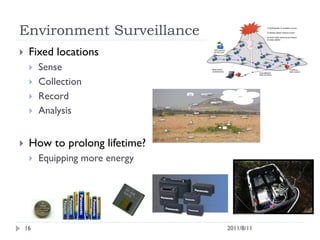
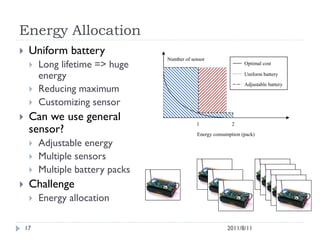
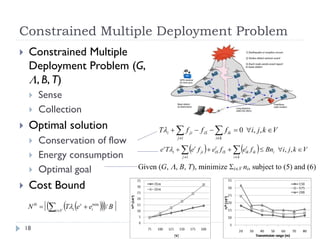
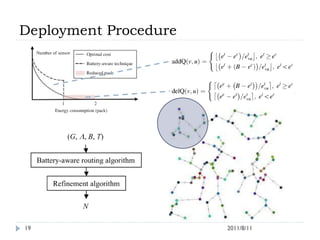
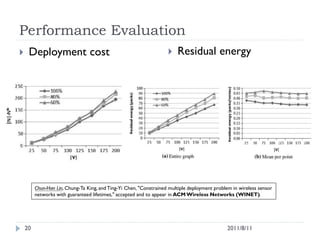

This document summarizes a student's thesis on deployment techniques in wireless sensor networks. It discusses three techniques studied: indoor robot navigation, debris-flow observation, and environment surveillance. For each application, the document outlines the challenges, problem formulations, deployment procedures, and performance evaluations. It concludes by discussing future work and publications resulting from the thesis research.