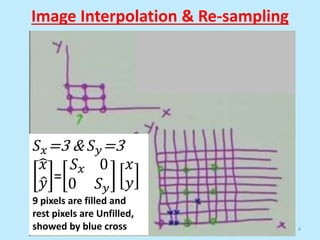
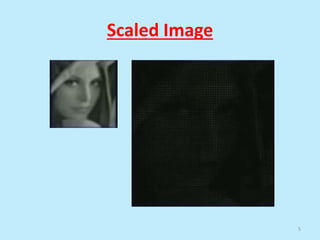
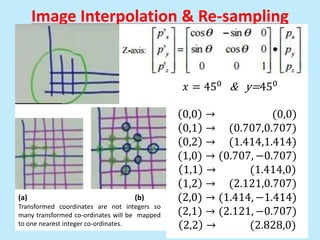
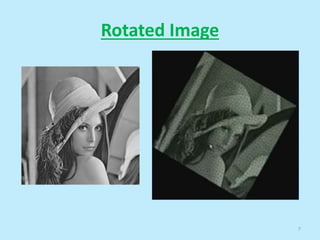
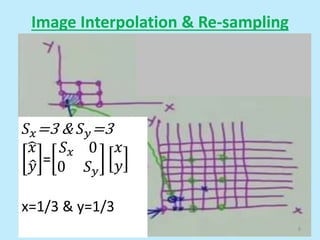
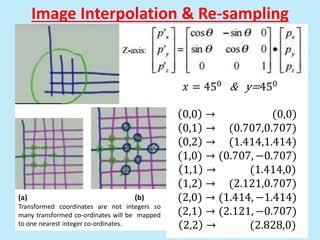
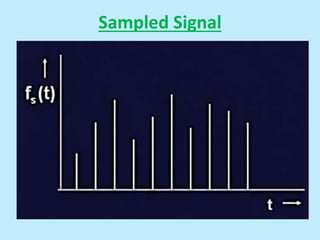
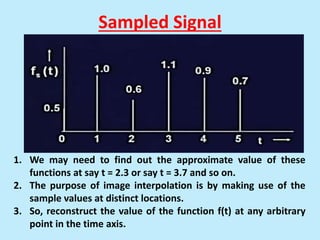
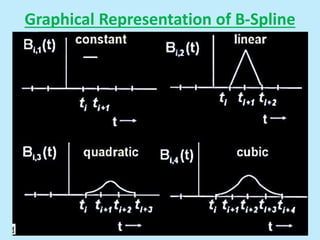
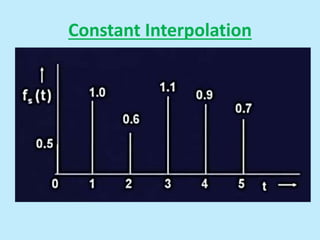
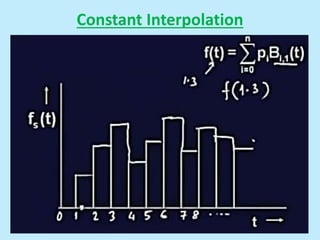
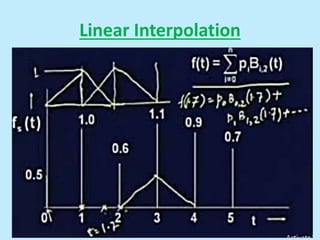
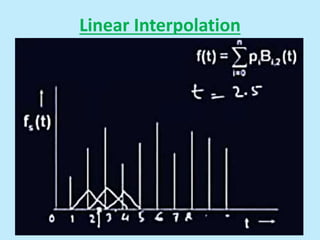
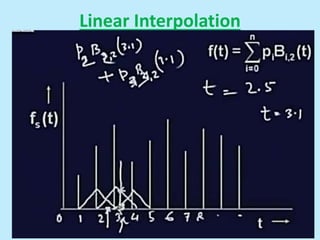
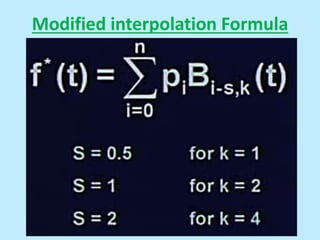
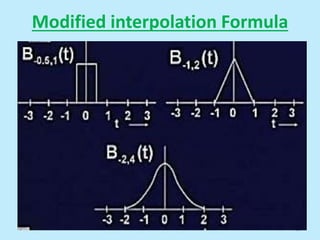
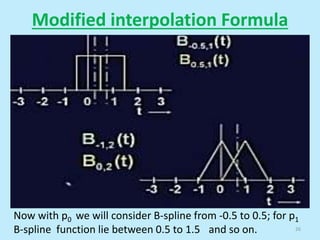
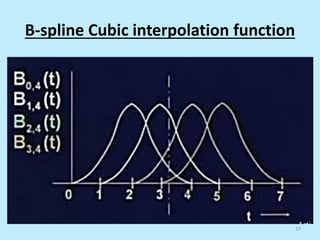
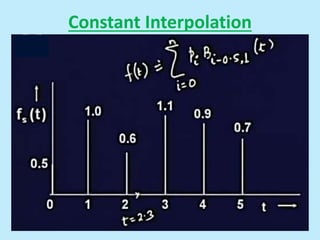
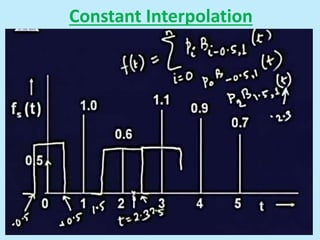
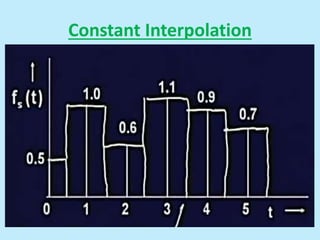
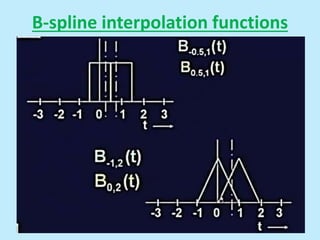
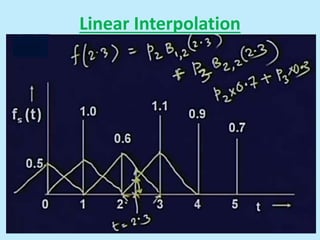
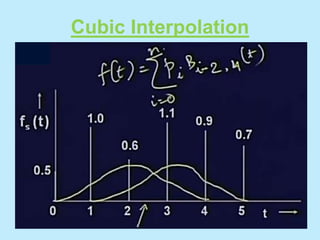
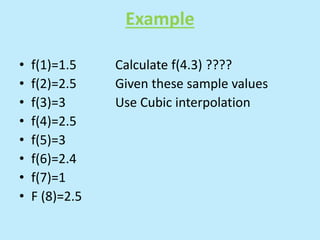
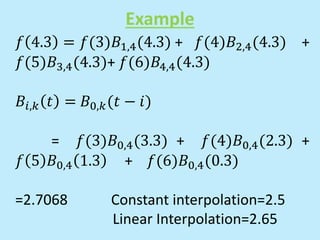
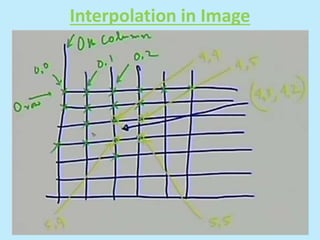
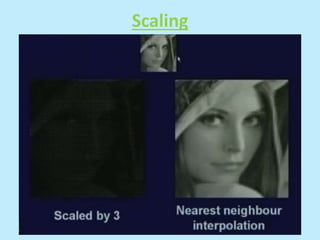
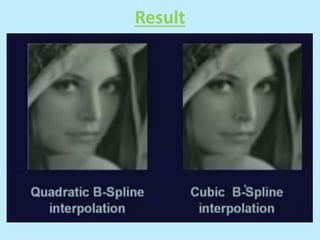
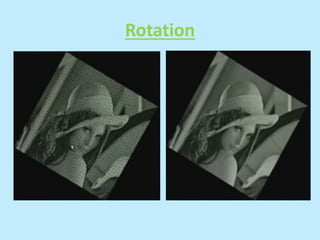
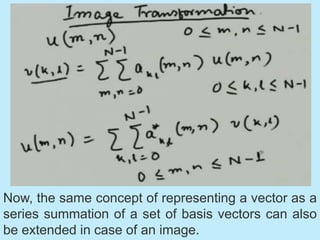
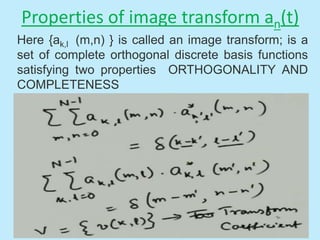
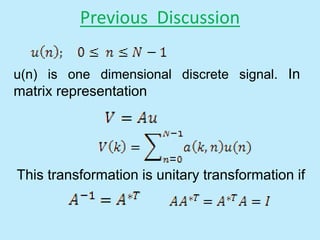
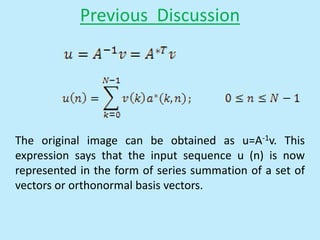
This document discusses image interpolation and resampling. It explains that interpolation is needed when transforming images, such as scaling or rotating, as the transformed coordinates are not usually integers. Various interpolation methods are covered, including constant, linear, and cubic interpolation using B-spline functions. Examples are provided to demonstrate cubic interpolation to estimate values between given sample points. The document also discusses properties of interpolation, such as using nearby sample values and avoiding discontinuities.