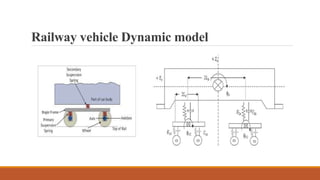
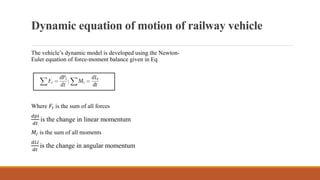
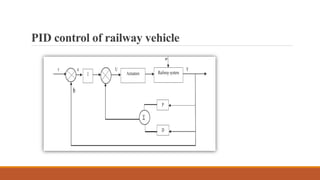
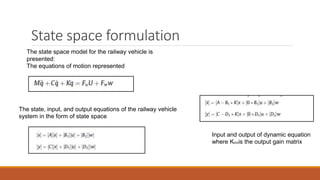
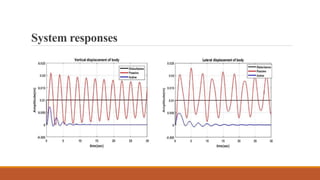
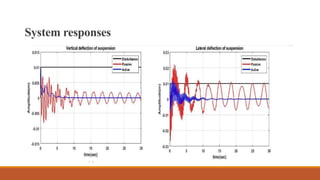
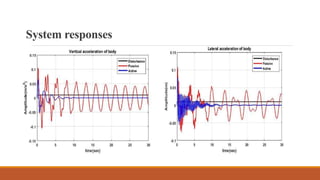
This document presents a digital control system that uses PID control with pole placement technique to actively control the suspension of a railway vehicle. It develops a dynamic model of the railway vehicle using Newton-Euler equations of motion. It then formulates the vehicle dynamics as a state space model and analyzes the system responses of the railway vehicle suspension under PID control to ensure safety and ride comfort.